1
Изобретение относится к робототехнике и может быть использовано при создании промьппленных роботов.
Целью изобретения является повышение быстродействия устройства s за счет реализации квазиоптимального алгоритма, инвариантного к изменению параметров нагрузки.
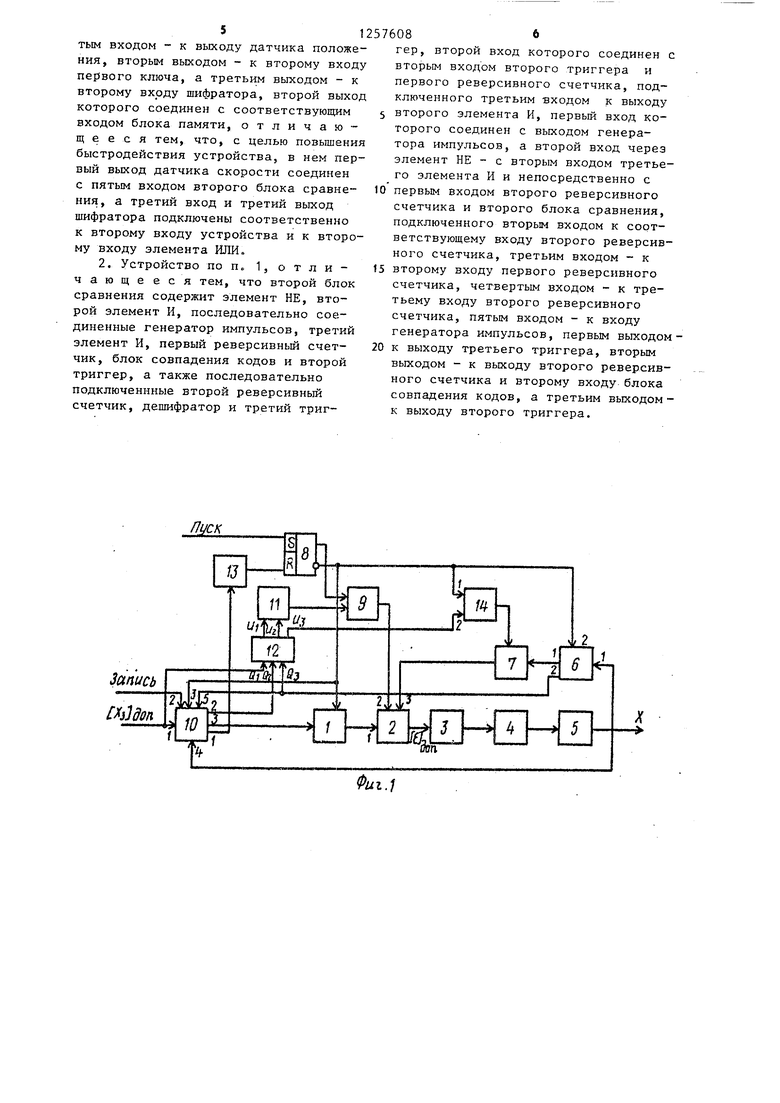
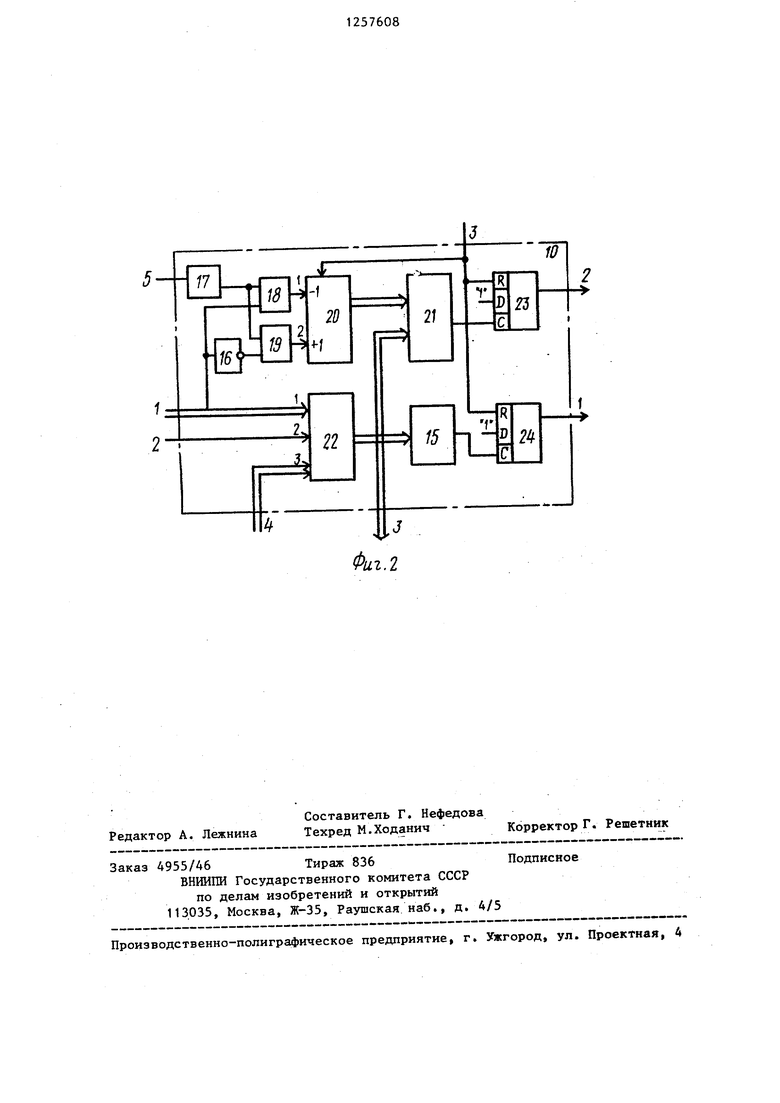
На фиг. 1 представлена функциональная схема предлагаемого устрой- Ю ства; на фиг, 2 - схема второго блока сравнения.
Устройство содержит (фиг.1) первый ключ 1, первый блок 2 сравнения, усилитель 3, двигатель 4, датчик 5 tS положения, преобразователь 6 скорости, второй ключ 7, первый триггер 8, элемент И 9, второй блок tO сравнения, блок 11 памяти, шифратор 12, формирователь 13 импульсов и элемент 20 I-fflH 14.
Блок 10 сравнения содержит (фиг,2) дешифратор 15, элемент НЕ 16, генератор 17 импульсов, второй и третий элементы И 18 и 19 соответственно, 25 первый реверсивный счетчик 20, блок 21 совпадения, второй реверсивный счетчик 22, второй и третий триггеры 23 и 24 соответственно.
Устройство работает следующим об- 30 разом.
При включении напряжения питания на выходе формирователя 13 формируется короткий импульс, устанавлива- 8 в состояние О
12576082
на интервале разгона уровень О, который разрешает прохождение частоты на выход генератора 17 импульсов. В зависимости от знака X
импульсы поступают на суммирующий () или вычитающий () входы первого реве сивного счетчика 20. Одновременно по импульсу в шине Запись происходит запись входного задания реверсивный счетчик 22. то и,
Х во второй
Если Х, О,
О, ,
и.
состояние О , 35
|10щии триггер геры 23 и 24 также устанавливаются в нулевое состояние. На вторые входы первого и второго ключей 1 и 7 подан разрешающий уровень. Первый элемент И 9 закрыт и на второй вход блока 2 поступает нулевой код. Началу отработки кода Xj соответствует появление в шинах Пуск и Запись коротких импульсов, если /Х,/г Х, и появление импульса только в шине За-
. , - чу , и -t/ , и -О
И из блока 11 памяти через элемент И 9 на второй вход блока 2 поступает управляющий сигнал mlion Р зтом на первом и третьем входах блока 2 нулевые уровни. Управление без изменений поступает на вход усилителя 3, осуществляющего преобразование кода - т Аоп длительность импульса, и в зависимости от знака открывает требуемое плечо мостовой схемы усилителя 3, обеспечивая тем самым заданное направление вращения двигателя 4,
Импульсы с выхода датчика 5 положения поступают на вычитающий вход реверсивного счетчика 22 (), - уменьшая содержимое кода ошибки на его выходе.
При малых значениях электромагнит ной постоянной времени динамика устройства описывается дифференциальным уравнением
x(t)T,M+x(t)Ku(t)Mu(t)U и,
T5/,LTnlt|r| .
I
40
пись
если
+ X
mpj
/xW
X
м
и та)( о pajroiiq
торможений Если |Х,/гХ
3 Эо импульс с шины Пуск устанавливает триггер 8 в состояние 1, что соответствует подаПоэтому для перевода его из состо яния X 0 в состояние X Х требуется один интервал управления, длительность которого определяется достижением текущей скоростью максимального значения Х.
В момент X Ху„ на втором выходе датчика 6 скорости появится уровень. 1, запрещающий прохождение частоты
45 на выход генератора 17 импульсов. Эт обеспечивает формирование и запоминание на интервале равномерного дви- жения в счетчике 20 кода пути торможения fx Д(л, , обеспечивающего опти5Q мальный по быстродействию процесс то можения двигателя 4 с установившейся скоростью:
5Q мальный по быстродействию процесс т можения двигателя 4 с установившейс скоростью:
че запрещающего сигнала на вторые входы первого и второго ключей 1 и 7, На входы второго и третьего триггеров 23 я 24 подан нулевой сигнал, По отрицательному перепаду сигнала на тре- 55 где к - коэффициент усиления усили- тьем входе блока 10 сравнения первый реверсивный счетчик 20 обнуляется.
Y Т
г эм
(х -киеп
Х „ +KU 1.
ки У .
теля 3;
- электромеханическая постоянная времени, удовлетворяющая
На втором выходе датчика 6 скорости
S 0
5
0
на интервале разгона уровень О, который разрешает прохождение частоты на выход генератора 17 импульсов. В зависимости от знака X
импульсы поступают на суммирующий () или вычитающий () входы первого реверсивного счетчика 20. Одновременно по импульсу в шине Запись происходит запись входного задания реверсивный счетчик 22. то и,
Х во второй
Если Х, О,
О, ,
и.
5
. , - чу , и -t/ , и -О,
И из блока 11 памяти через элемент И 9 на второй вход блока 2 поступает управляющий сигнал mlion Р зтом на первом и третьем входах блока 2 нулевые уровни. Управление без изменений поступает на вход усилителя 3, осуществляющего преобразование кода - т Аоп длительность импульса, и в зависимости от знака открывает требуемое плечо мостовой схемы усилителя 3, обеспечивая тем самым заданное направление вращения двигателя 4,
Импульсы с выхода датчика 5 положения поступают на вычитающий вход реверсивного счетчика 22 (), - уменьшая содержимое кода ошибки на его выходе.
При малых значениях электромагнитной постоянной времени динамика устройства описывается дифференциальным уравнением
x(t)T,M+x(t)Ku(t)Mu(t)U и,
T5/,LTnlt|r| .
I
0
Поэтому для перевода его из состояния X 0 в состояние X Х требуется один интервал управления, длительность которого определяется достижением текущей скоростью максимального значения Х.
В момент X Ху„ на втором выходе датчика 6 скорости появится уровень. 1, запрещающий прохождение частоты
5 на выход генератора 17 импульсов. Это обеспечивает формирование и запоминание на интервале равномерного дви- жения в счетчике 20 кода пути торможения fx Д(л, , обеспечивающего оптиQ мальный по быстродействию процесс торможения двигателя 4 с установившейся скоростью:
5 где к - коэффициент усиления усили-
к - коэффициент
Y Т
г эм
(х -киеп
- коэффициент усиления усили-
теля 3;
- электромеханическая постоян ная времени, удовлетворяющая /
3
условию т,. , т
такт . 9М J
остающаяся неизменной в процессе одного перемещения. Учитывая, что время разгона до становившейся скорости Х
ки
tp
t,-t. т,„ in(.,
следует линейная зависимость между временем разгона tp и путем торможения Х-. При этом частота генера1
тора 17 импульсов выбирается из условия, чтобы при Т,,
9м
эм
реверсивный счетчик 20 заполнился до значения оптимального пути торможения X, при Т .
Моменту окончания разгона будут соответствовать следующие значения выходных сигналов шифратора 12 U 0, U l , что соответствует подаче с выхода блока 11 через эле- 20 мент И 9 на второй вход блока 2 ко- Да .
Второй ключ 7 открыт, Таким образом, двигатель Д работает в режиме стабилизации скорости. 25
В момент окончания равномерного движения блок 21 совпадения фиксирует выполнение равенства Х и импульс положительной полярности поступает на вход второго триггера 23зо переводя его в состояние 1. В соответствии с реализуемыми логическими функциями на выходе шифратора 12 имеем: U, l ; , что обеспеПри X, работа устройства анало гична. Если величина входного кода Х мала|Х,| I Х I и не обеспечи
10 вает выход на установившуюся скорос Х, то импульс в шине Пуск отсутствует, благодаря чему триггер 8 уд живается в состоянии О и на второ входе блока 2 также будет нулевой к
t5 При поступлении сигнала Запись ко
АОП
записывается во второй ревер
сивный счетчик 22 и устройство рабо ет под действием обратных связей по положению и скорости.
Применение устройства для управления приводами промышленных робото у которых электромеханическая посто янная времени изменяется в широких пределах в зависимости от расположения в пространстве последующих зв ньев кинематической цепи и веса гру в хвате робота, позволяет получать близкие к оптимальным по быстродействию переходные процессы.
Формула изобретени
1. Устройство для управления эле троприводом робота, содержащее посл
чивает подачу с выхода блока 11 черег довательно соединенные первый ключ, элемент И 9 на второй вход блока 2 - первый блок сравнения, усилитель.
управляющего воздействия -U,,
iJAon
двигатель, датчик положения, датчик
При этом на интервале торможения обес- скорости, шифратор, блок памяти и печивается режим динамического тормо- первый элемент И, а также последо- жения устройства {ключи 1и7 закрыты), о вательно подключенные второй блок
Содержимое второго реверсивного счетчика 22 уменьшается под действием импульсов от датчика 5 положения. Момент окончания торможения определяется с помощью дешифратора 15. При вхождении устройства в некоторую окрестность точки позиционирования /Xj-} Xg , на выходе дешифратора 15 .появляется импульс положительной полярности, устанавливающий третий 50 триггер 24 в состояние 1. Этот перепад устанавливает триггер 8 . в состояние О, запрещая тем самым прохождение управляющего сигнала с выхода блока 1 Г через элемент И 9.Клю- 55 вым и вторым входами второго блока
чи 1 и 7 открываются, а первый и второй выходы блока 10, а также второй выход преобразователя 6 скорости
2576084.
устанавливаются в состоянии О. Таким образом, дальнейшая доводка двигателя 4 осуществляется под действием скоростной и позиционнЬй обратных 5 связей с обеспечением плавного подхода к точке позиционирования.
При X, работа устройства аналогична. Если величина входного кода Х мала|Х,| I Х I и не обеспечи10 вает выход на установившуюся скорость Х, то импульс в шине Пуск отсутствует, благодаря чему триггер 8 удерживается в состоянии О и на втором входе блока 2 также будет нулевой код.
t5 При поступлении сигнала Запись код
АОП
записывается во второй реверсивный счетчик 22 и устройство работает под действием обратных связей по положению и скорости.
Применение устройства для управления приводами промышленных роботов, у которых электромеханическая постоянная времени изменяется в широких пределах в зависимости от расположения в пространстве последующих звеньев кинематической цепи и веса груза в хвате робота, позволяет получать . близкие к оптимальным по быстродействию переходные процессы.
Формула изобретения
1. Устройство для управления электроприводом робота, содержащее последовательно соединенные первый ключ, первый блок сравнения, усилитель.
двигатель, датчик положения, датчик
скорости, шифратор, блок памяти и первый элемент И, а также последо- вательно подключенные второй блок
сравнения, формирователь импульсов, первый триггер, элемент ИЛИ и второй ключ, второй вход которого соединен с соответствующим выходом датчика скорости, а выход - с вторым входом первого блока сравнения, подключенного третьим входом к выходу первого элемента И, второй вход которого соединен с вторьм выходом первого триггера, подключенного первым выходом к второму входу датчика скорости, а вторым входом - к первому входу устройства, второй и третий входы которого соединены соответственно с персравнения, подключе1пшго третьим входом к первому выходу первого триггера и первому входу первого ключа,четвертым входом - к выходу датчика положения, вторым выходом - к второму входу первого ключа, а третьим выходом - к второму входу шифратора, второй выход которого соединен с соответствующим входом блока памяти, отличающееся тем, что, с целью повышения быстродействия устройства, в нем первый выход датчика скорости соединен с пятым входом второго блока сравнения, а третий вход и третий выход шифратора подключены соответственно к второму входу устройства и к второму входу элемента ИЛИ.
2. Устройство по п. 1, отличающееся тем, что второй блок сравнения содержит элемент НЕ, второй элемент И, последовательно соединенные генератор импульсов, третий элемент И, первый реверсивный счетчик, блок совпадения кодов и второй триггер, а также последовательно подключеннные второй реверсивньш счетчик, дешифратор и третий триггер, второй вход которого соединен с вторым входом второго триггера и первого реверсивного счетчика, подключенного третьим входом к выходу
второго элемента И, первый вход которого соединен с выходом генератора импульсов, а второй вход через элемент НЕ - с вторым входом третьего элемента И и непосредственно с
первым Входом второго реверсивного счетчика и второго блока сравнения, подключенного вторым входом к соответствующему входу второго реверсивного счетчика, третьим входом - к
второму входу первого реверсивного счетчика, четвертым входом - к третьему входу второго реверсивного счетчика, пятым входом - к входу генератора импульсов, первым выходомк выходу третьего триггера, вторым выходом - к выходу второго реверсивного счетчика и второму входу блока совпадения кодов, а третьим выходом- к выходу второго триггера.
Редактор А. Лежнина
Составитель Г. Нефедова
Техред М.Ходанич Корректор Г. Решетник
Заказ 4955/46 Тираж 836
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, А
Фиг.2
Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом робота | 1982 |
|
SU1092462A1 |
| Способ сварки и устройство для его осуществления | 1987 |
|
SU1555080A1 |
| Устройство для программного управления объектом с @ -ступенчатым остановом | 1984 |
|
SU1196813A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Позиционный дискретный электропривод | 1985 |
|
SU1352474A1 |
| Устройство для контроля манипулятора | 1988 |
|
SU1657375A1 |
| Система позиционного управления | 1985 |
|
SU1247832A1 |
| Устройство для разгона и торможения электропривода | 1986 |
|
SU1374182A1 |
| Цифровой измеритель параметров комплексного сопротивления | 1989 |
|
SU1732292A1 |
| Дельта-модулятор | 1988 |
|
SU1510090A2 |
Изобретение относится к области робототехники и может быть использовано при создании промышленных роботов. В устройстве за счет соответствующего соединения второго блока сравнения, шифратора, датчика скорости и элемента ИЛИ, а также соответствующего выполнения второго блока сравнения обеспечивается повышение быстродействия. 1 з.п. ф-лы. 2 ил. ю О1 | Од
| Регулятор | 1979 |
|
SU830299A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
