Изобретение относится к устройствам для управления намоткой бумажного полотна на оборудовании для переработки бумаги: продольно-резательном станке, пе- ремотном станке, суперкаландре и т.д.
Цель изобретения - повышение точности регулирования натяжения бумажного полотна при разгоне и торможении.
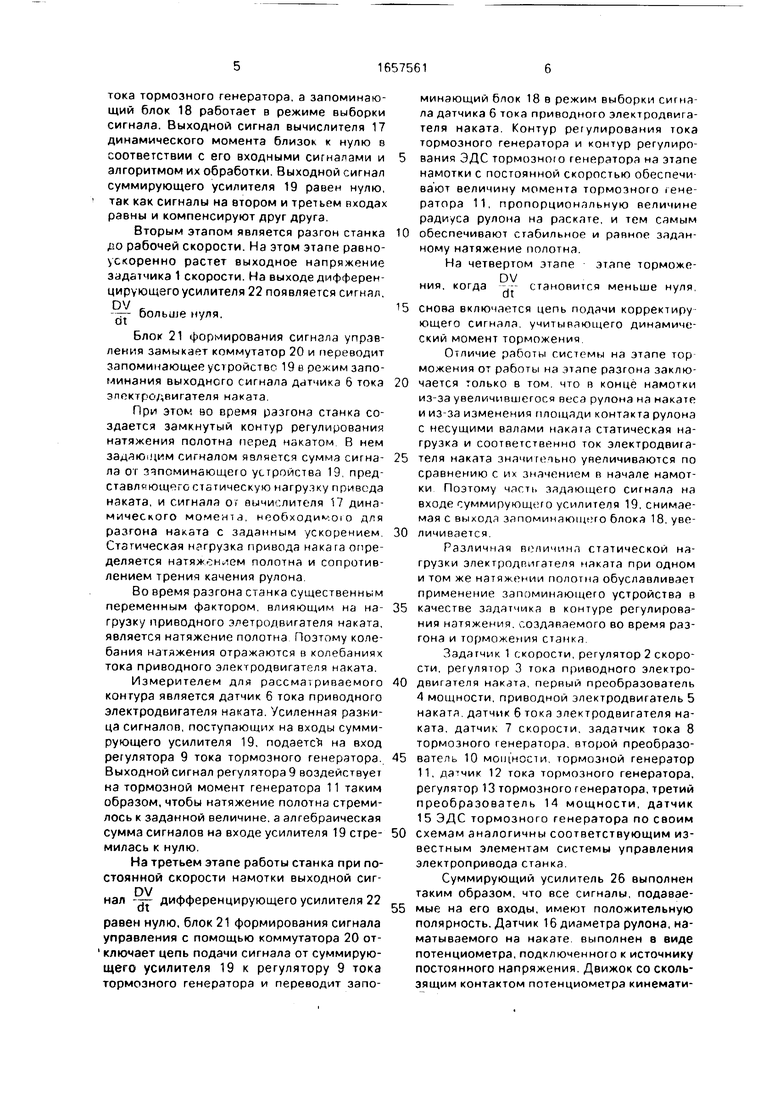
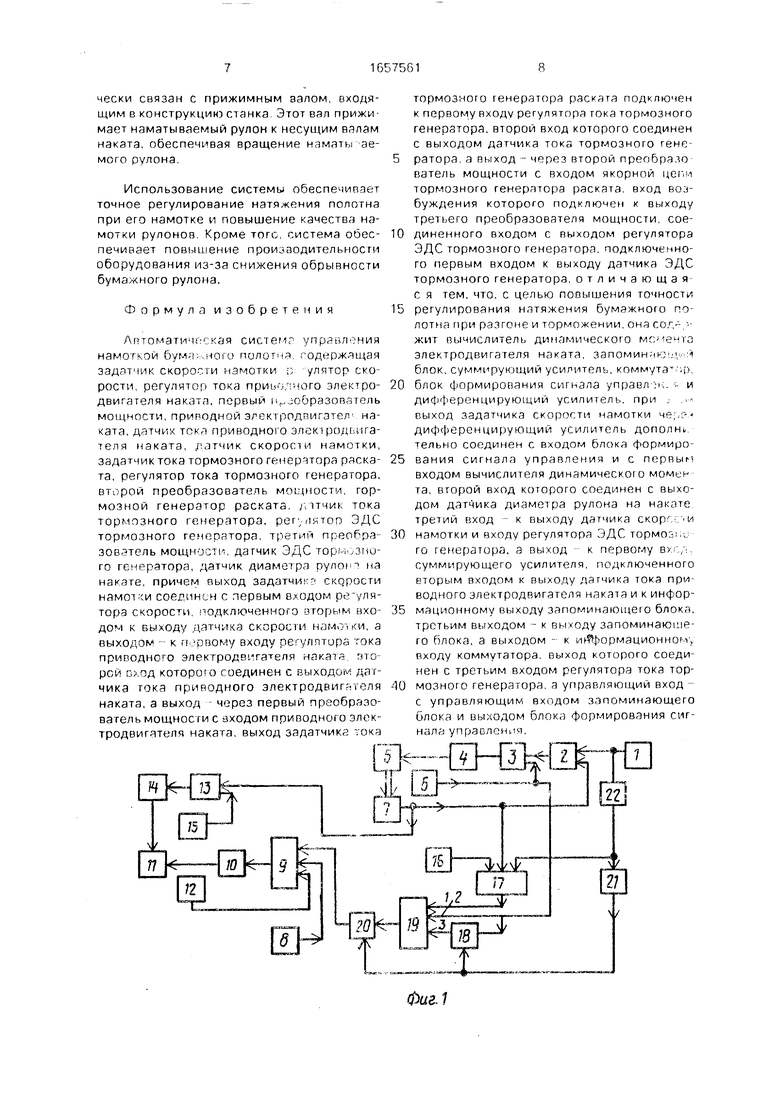
На фиг.1 представлена схема автоматической системы управления намоткой бумажного полотна; на фиг.2 - схема вычислителя динамического момента; на фиг.З - схема блока управления коммутацией.
Система (фиг.1) содержит задатчик 1 скорости намотки,регулятор 2 скорости,регулятор 3 тока приводного электродвигателя наката, первый преобразователь 4 мощности, приводной электродвигатсть 5 наката, датчик 6 тока электродвигателя наката, датчик 7 скорости намотки, зядатчик 8 тока тормозного генератора раската, регулятор 9 тока тормозного генератора, второй преобразователь 10 мощности, тормозной генератор 11 раската, датчик 12 тока тормозного генератора, регулятор 13 ЭДС тормозного генератора, третий преобразователь 14 мощности, датчик 15 ЭДС тормозного генератора, датчик 16 диаметра рулона на накате, вычислитель 17 динамического момента электродвигателя накатэ, запоминающий блок 18, суммирующий усилитель 19, коммутатор 20, блок 21 формирования сигнала управления и дифференцирующий усилитель 22.
Вычислитель 17 динамического момента (фиг.2) содержит блоки 23 - 25 перемножения и суммирующий усилитель 26. Оба входа блока 23 через второй вход вычислителя 17 присоединены к датчику 16 диаметра. Оба входа блока 24 через третий вход вычислителя 17 присоединены к датчику 7 скорости. Первый вход блока 25 и третий вход усилителя 26 через первый вход вычислителя 17 присоединены к входу дифференцирующего усилителя 22. Второй вход блока 25 присоединен к выходу блока 23, выходы блоков 25 и 24 присоединены соответственно к первому и второму входам суммирующего усилителя 26, а выход последнего соединен с выходом вычислителя 17,
Алгоритм работы вычислителя динамического момента, связывающий аыходной сигнал вычислителя 17 динамического момента с входными сигналами вычислителя, т.е. с выходными сигналами датчика 16 диаметра рулона на накате, датчика 7 скорости и дифференцирующего усилителя 22, определяется выражением
Мдин - -тг (J ( нак ) -
,, dV , ,, „2 dV .,2 -Co- + CiD d +C2V
Это выражение получается в результате преобразований системы уравнений:
J СКдв.нак (Jnex.HaK + Jpyn ) X Мдв.мзк i
Г)П
. П2 П п .- вал
U В р д tf
- К D2;
1.5
V h dt ;
0
V
0
5
0
5
WAB.HSK - -f
где J - суммарный момент инерции наката, приведенный к валу электродвигателя наката, кгм ;
Jwex.HaK - момент инерции механизма наката, приведенный к валу электродвигателя наката, кгм ;
Jpyn - момент инерции рулона, приведенный к валу электродвигателя наката, кгм2;
D.B - соответственно диаметр и ширина рулона бумаги на накате, м;
h, р - соответственно толщина и удельная плотность бумаги, м, кг/м3:
V - скорость намотки полотна, м/с;
а - угловая скорость электродвигателя наката,
К, Co.Ci.Ca конструктивные параметры;
Овал - диаметр несущих валов наката, м;
i - передаточное число редуктора.
Блок 21 управления коммутацией (фиг.З) представляет собой аналоговый компаратор с двумя входами, который через выпрямие тельный диодный мост соединен с выходом дифференцирующего усилителя. Если у компаратора , то его иВых -Упитания, если DBX 0, то его Увых 0.
Система управления намоткой бумаж- Q ного полотна работает следующим образом.
В начале цикла намотки станок работает на вспомогательной скорости и происходит заправка полотна с раската на накат. Затем задатчиком тока 8 тормозного гене- 5 ратора раската устанавливается требуемое натяжение полотна перед накатом. При этом выходное напряжение блока 21 формирования сигнала управления равно нулю. Коммутатор 20 отключает выход суммирующего усилителя 19 от входа регулятора 9
тока тормозного генератора, а запоминающий блок 18 работает в режиме выборки сигнала. Выходной сигнал вычислителя 17 динамического момента близок к нулю в соответствии с его входными сигналами и алгоритмом их обработки. Выходной сигнал суммирующего усилителя 19 равен нулю, так как сигналы на втором и третьем входах равны и компенсируют друг друга.
Вторым этапом является разгон станка до рабочей скорости. На этом этапе равно- VCKOpeHHo растет выходное напряжение задатчика 1 скорости. На выходе дифференцирующего усилителя 22 появляется сигнал.
DV ,
--г- больше нуля.
Блок 21 формирования сигнала управления замыкает коммутатор 20 и переводит запоминающее устройстве 19 в режим запоминания выходного сигнала датчика 6 тока электродвигателя наката,
При этом во время разгона станка создается замкнутый контур регулирования натяжения полотна перед накатом В нем задающим сигналом является сумма сигна- ла от запоминающего устройства 19, представляющего статическую нагрузку привода наката, и сигнала or вычислителя 17 динамического момента, необходимо о для разгона наката с заданным ускорением Статическая н грузка привода наката определяется натяжением полотна и сопротивлением трения качения рулона
Во время разгона станка существенным переменным фактором, влияющим на на- грузку приводного элетродвигателя наката, является натяжение полотна Поэтому колебания натяжения отражаются в колебаниях тока приводного электродвигателя наката.
Измерителем для рассматриваемого контура является датчик 6 тока приводного электродвигателя наката. Усиленная разница сигналов, поступающих на входы суммирующего усилителя 19, подаете на вход регулятора 9 тока тормозного генератора. Выходной сигнал регулятора 9 воздействует на тормозной момент генератора 11 таким образом, чтобы натяжение полотна стремилось к заданной величине, а алгебраическая сумма сигналов на входе усилителя 19 стре- милась к нулю.
На третьем этапе работы станка при постоянной скорости намотки выходной сигнал --г- дифференцирующего усилителя 22
равен нулю, блок 21 формирования сигнала управления с помощью коммутатора 20 от- 1 ключает цепь подачи сигнала от суммирующего усилителя 19 к регулятору 9 тока тормозного генератора и переводит запоминающий блок 18 в режим выборки сигнала датчика 6 тока приводного электродвигателя наката. Контур регулирования тока тормозного генератора и контур регулирования ЭДС тормозного генератора на этапе намотки с постоянной скоростью обеспечивают величину момента тормозного iene- ратора 11, пропорциональную величине радиуса рулона на раскате, и тем самым обеспечивают стабильное и равное заданному натяжение полотна.
На четвертом этапе этапе торможе- DV
ния. когда
dt
становится меньше нуля,
снова включается цепь подачи корректиру ющего сигнала, учитывающего динамический момент торможения
Отличие работы системы на этапе тор можения от работы на этапе разгона заключается только в том что в конце намотки из-за увеличившегося веса рулона на накате и из-за изменения площяди контакта рулона с несущими валами наката статическая нагрузка и соответственно ток электродвигателя наката значительно увеличиваются по сравнению с их значением в начале намотки Поэтому часть задающего сигнала на входе суммирующего усилителя 19, снимаемая с выхода запоминающего блока 18. увеличивается
Различная величина статической нагрузки электродпигателя наката при одном и том же натяжении полотна обуславливает применение запоминающего устройства в качестве задатчика в контуре регулирования натяжения, создаваемого во время разгона и торможения станка
Задагчик 1 скорости, регулятор 2 скорости, регулятор 3 тока приводного электродвигателя наката, первый преобразователь 4 мощности, приводной электродвигатель 5 наката датчик 6 тока электродвигателя наката, датчик 7 скорости, задатчик тока 8 тормозного (енератора, второй преобразователь 10 мощности, тормозной генератор 11, датчик 12 тока тормозного генератора, регулятор 13 тормозного генератора, третий преобразователь 14 мощности, датчик 15 ЭДС тормозного генератора по своим схемам аналогичны соответствующим известным элементам системы управления электропривода станка.
Суммирующий усилитель 26 выполнен таким образом, что все сигналы, подаваемые на его входы, имеют положительную полярность. Датчик 16 диаметра рулона, наматываемого на накате выполнен в виде потенциометра, подключенного к источнику постоянного напряжения. Движок со скользящим контактом потенциометра кинематически связан с прижимным валом входящим в конструкцию станка Этот вал прижи мает наматываемый рулон к несущим валам наката обеспечивая вращение наматы ае- мого рулона5
Использование системы обеспечивает точное регулирование натяжения полотна при его намотке и повышение качества намотки рулонов Кроме тоге система обеспечивает повышение производительности оборудования из-за снижения обрывности бумажного рулона.
Формула изобретения
Артоиати и г 1 ая систем намот«,ои 6/Mri -toiu полит а одержящая задатчик скороди намотки ,, улятор ско рости регулятор тока приич -юго элек ро- двигателя наката, первый ь „соразов&тель мощности приводной злею родпигател начата дягчич ток-гТ приводною элекфодс и га- теля наката /атчик скорости намотки задатчик тока тормозного генерчтора раскз та, регулятор тока тормозного генератора, второй преобразсватепь мощности тормозной генератор раската ; ттчт тока тормозного генератора, регулятор ЭДС тормозного генеоатора третий пгеобра мощн датчик ЭДС гор чни го генератора, датчик диаметра пуло на накате причем выход задатчи1 скорости намот си соегин -ч г первым вводом ре У ля- тора скорости подключенного згорым вхо дом к выходу датчика скорости HJM. (и а выходом к п чтвому входу ое улчтирс гока приводного электродвигателя накати гло реи с,од которою соединен с выходов датчика тока приводного электродвигателя наката, а выход через первый преобразователь мощности с входом приводного электродвигателя наката выход задатчика окз
-
5
10
15
20
25
30
35
40
тормозного генератора раската подключен к первому входу регулятора тока тормозного генеоатора второй вход которого соединен с выходом датчика токз тормозного гене ратора а выход - через второй преобраяо ватель мощности с входом якорной цеьч тормозного генератора раската вход возбуждения которого подключен к выходу третьего преобразователя мощности сое диненного входом с выходом регулятора ЭДС тормозного генератора подключенного первым входом к выходу датчика ЭДС тормозного генератора отличающая с я тем что с целью повышения точности регулирования натяжения бумажного по лотна при разгоне и торможении она сог- жит вычислитель динамического электродвигателя наката запомни it-; 1 блок суммирующий усилитель коммута р блок формирования сигнала /правл % - и дифференцирующий усилитель при выход задатчика скорости намотки ч° - дифференцирующий усилитель дополни тельно соединен с входом блока формиро вания сигнала управпения и с первым входом вычислителя динамического момси та второй вход которого соединен с выхс- дом датчика диаметра рулона на накате третий вход к выходу датчика скорг И намотки и входу регулятора ЭДС тормоз t го генератора, а выход к первому в суммирующего усилителя подключенного вторым входом к выходу датчика тока при водного электродвигателя наката и к информационному выходу запоминающего блока третьим выходом - к выходу запоминающе го блока а выходом к информационном входу коммутатора выход которого соеди йен с третьим входом регулятора тока тормозного генератора а управляющий вход с управляющим входом запоминающего блока и вылодом блока формирования сиг- HdPri управления
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая система управления намоткой бумажного полотна | 1989 |
|
SU1657560A1 |
| Автоматическая система управления намоткой бумажного полотна | 1989 |
|
SU1622472A1 |
| Устройство для автоматического регулирования натяжения при перемотке ленточного материала | 1983 |
|
SU1131810A2 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД СУПЕРКАЛАНДРА | 1997 |
|
RU2131641C1 |
| Устройство для регулирования скорости и натяжения длинномерного материала при перемотке | 1982 |
|
SU1043093A1 |
| Устройство для автоматического регулирования натяжения при перемотке ленточного материала | 1975 |
|
SU727546A1 |
| Автоматическая система управления намоткой бумажного полотна | 1986 |
|
SU1452876A1 |
| Устройство для регулирования скорости и натяжения длинномерного материала при перемотке | 1983 |
|
SU1151501A2 |
| Устройство для регулирования натяжения длинномерного материала | 1987 |
|
SU1505875A1 |
| Автоматическая система управления намоткой бумажного полотна | 1988 |
|
SU1567709A1 |
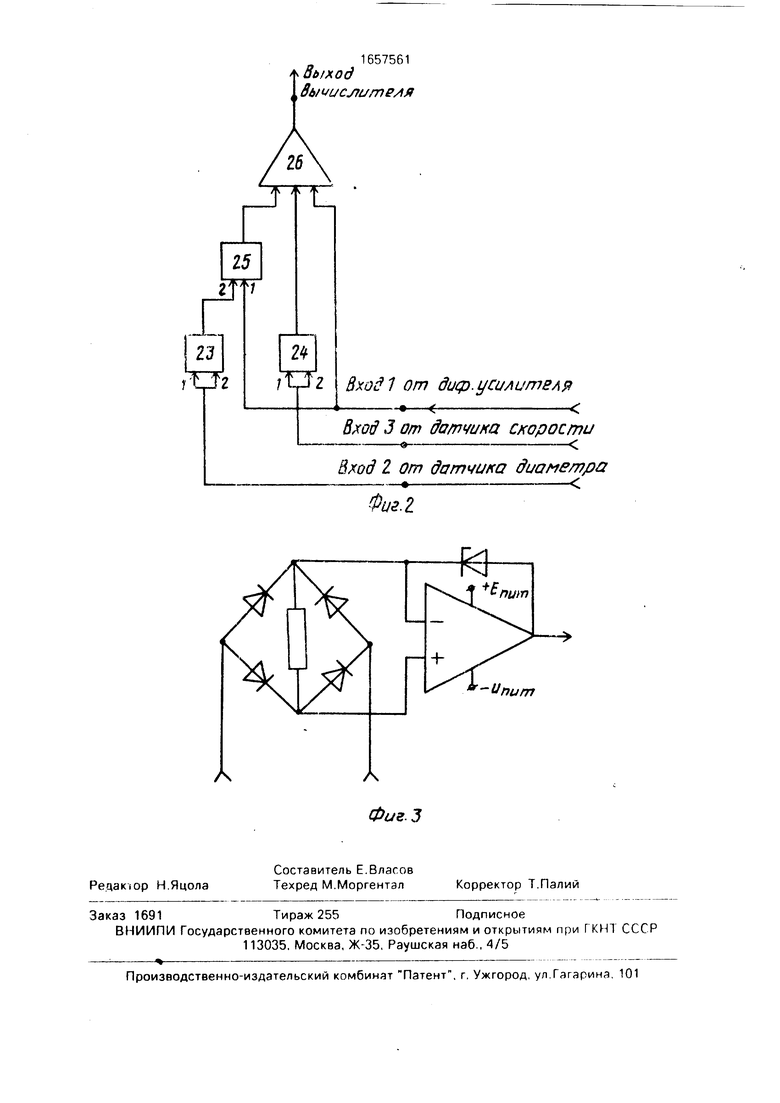
Изобретение относится к устройствам для управления намоткой бумажного полотна на оборудовании для переработки бумаги. Целью изобретения является повышение точности регулирования натяжения бумажного полотна при разгоне и торможении. Система содержит задатчик скорости 1 намотки, регулятор скорости 2, регулятор тока 3 приводного электродвигателя, первый преобразователь мощности 4, приводной электродвигатель 5 наката, датчик тока 6 электродвигателя, датчик скорости 7, задатчик тока 8 тормозного генератора раската, регулятор тока 9 . тормозного генератора, второй преобразователь мощности 10, тормозной генератор 11 раската, датчик тока 12 тормозного генератора, регулятор ЭДС 13 тормозного генератора, третий преобразователь мощности 14, датчик ЭДС 15 тормозного генератора. Выходы задатчика 1 и датчика скорости 7 соединены с входами регулятора скорости 2, выходы регулятора скорости 2 и датчика тока 6 соединены с входами регулятора тока 3, выход которого соединен с входом первого преобразователя мощности 4, соединенного выходом с электродвигателем 5. Выходы задатчика 8 и датчика 12 тока соединены с входами регулятора тока 9, выход которого через второй преобразователь мощности 10 соединен с якорной цепью генератора 11. Выходы датчика ЭДС 15 и датчика скорости 7 соединены с входами регулятора ЭДС 13, выход которого через третий преобразователь мощности 14 соединен с обмоткой возбуждения генератора 11. Система имеет датчик 16диаметрэ рулона, вычислитель динамического момента, запоминающий блок 18, суммирующий усилитель 19, коммутатор 20. блок формирования сигнала управления 21 и дифференцирующий усилитель 22. Выход задатчика 1 через усилитель 22 и выходы датчика 16 рулона и датчика скорости 7 соединены с входами вычислителя 17, выходом соединенного с первым входом суммирующего усилителя 19. Выход датчика тока 6 соединен с вторым входом усилителя 19 и через запоминающий блок 18с его третьим выходом, а выход усилителя 19 соединен через коммутатор 20 с входом регулятора тока 9 тормозного генератора. Выход задатчика скорости 1 через усилитель 22 соединен с входом блока 21 формирования сигнала управления, а выход блока 21 присоединен к управляющим входам запоминающего блока 18 и коммутатора 20. 3 ил. со с о ел VI ел (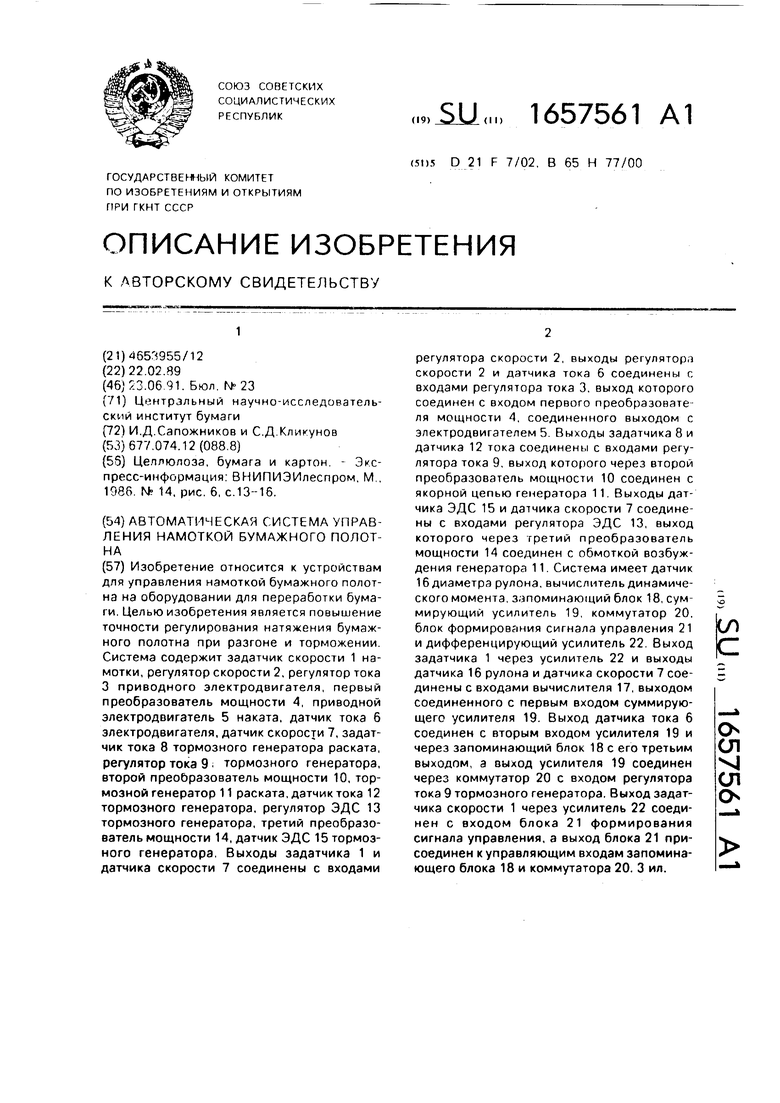
Фиг.1
1657561
Выход
( tSi /UL/CJ L//77ejjr
ВходЧ от диф.усилителя
С«
Вход 3 от датчика скорости
-.в
Вход 2 От датчика диаме/яра
.г
1657561
Фиг.Z
