Изобретение относится к технике автоматического регулирования.
Известен автоматизированный многодвигательный электропривод суперкаландра с индивидуальными секционными тиристорными преобразователями /1/.
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому техническому результату является многодвигательный электропривод суперкаландра, состоящего из раската, каландра и наката, содержащий задатчик интенсивности, задатчики натяжения обрабатываемого полотна в промежутках раскат-каландр и каландр-накат, датчики радиусов рулонов раската и наката, а также электропривод раската, который содержит тормозной генератор (ТГ), автоматическую систему регулирования (АСР) ЭДС ТГ, вход которой соединен с задатчиком интенсивности, а выход - с обмоткой возбуждения ТГ, АСР тока якоря ТГ, датчик натяжения и регулятор натяжения, причем выход датчика связан со вторым входом регулятора натяжения, первый вход которого подключен к выходу задатчика натяжения раскат-каландр, а выход - к первому входу АСР тока якоря ТГ, электропривод каландра, содержащий электродвигатель, датчик скорости на его валу, АСР скорости, первый вход которой соединен с задатчиком интенсивности, а второй вход - с датчиком скорости, и электропривод наката, состоящий из электродвигателя, АСР ЭДС этого электродвигателя, вход которой соединен с задатчиком интенсивности, а выход - с обмоткой возбуждения электродвигателя, АСР тока якоря двигателя, датчика натяжения и регулятора натяжения, причем выход датчика связан со вторым входом регулятора натяжения, первый вход которого подключен к выходу задатчика натяжения каландр-накат, а выход - к первому входу АСР тока якоря двигателя /3/.
Недостатком прототипа является недостаточная по технологическим условиям точность поддержания заданного натяжения отрабатываемого бумажного полотна в периоды пуска и торможения суперкаландра и при возмущающих воздействиях на каландре (изменение момента сопротивления и др.), что обусловлено влиянием механических инерционностей раската и наката на динамику взаимосвязанной через полотно системы, а также влиянием пульсаций сигналов датчиков и высокочастотных помех.
Задачей изобретения является создание электропривода, обеспечивающего повышение точности регулирования натяжения бумажного полотна, помехоустойчивости и надежности работы в переходных и квазистационарных режимах функционирования агрегата.
Поставленная задача решается тем, что многодвигательный электропривод суперкаландра содержит задатчик интенсивности, задатчики натяжения обрабатываемого полотна в промежутках раскат - каландр и каландр-накат, датчики радиусов рулонов раската и наката, а также электропривод раската, содержащий тормозной генератор, автоматическую систему регулирования (АСР) ЭДС ТГ, вход которой соединен с задатчиком интенсивности, а выход - с обмоткой возбуждения ТГ, АСР тока якоря ТГ, датчик натяжения и регулятор натяжения, причем выход датчика связан со вторым входом регулятора натяжения, первый вход которого подключен к выходу задатчика натяжения раскат-каландр, а выход - к первому входу АСР тока якоря ТГ, электропривод каландра, содержащий электродвигатель, датчик скорости на его валу, АСР скорости, первый вход которой соединен с задатчиком интенсивности, а второй вход - с датчиком скорости, и электропривод наката, состоящий из электродвигателя, АСР ЭДС этого двигателя, вход которой соединен с задатчиком интенсивности, а выход - с обмоткой возбуждения электродвигателя, АСР тока якоря двигателя, датчика натяжения и регулятора натяжения, причем выход датчика связан со вторым входом регулятора, первый вход которого подключен к выходу задатчика натяжения каландр-накат, а выход - к первому входу АСР тока якоря двигателя.
Новым по сравнению с прототипом является то, что многодвигательный электропривод суперкаландра имеет устройства компенсации инерционных масс (УКИМ) с полосно-заграждающими активными фильтрами, входы которых соединены с выходом датчика скорости каландра, а выходы подключены к первым входам УКИМ, вторые входы которых соединены с датчиками радиусов рулонов раската и наката, а выходы УКИМ связаны соответственно со вторыми входами АСР токов якоря ТГ и двигателя наката.
Введение вышеуказанных новых элементов по сравнению с прототипом обеспечивает значительное повышение точности регулирования натяжения обрабатываемого полотна и необходимую помехоустойчивость системы, что в конечном итоге позволяет увеличить скорости агрегатов, повысить их производительность, надежность работы и качество отделки бумаги.
Сущность изобретения поясняется чертежом, на фиг. 1 которого показана функциональная схема многодвигательного электропривода суперкаландра, а на фиг. 2 - структурная схема УКИМ (а) и частотная характеристика полосно-заграждающего фильтра (б).
Многодвигательный электропривод суперкаландра, состоящего из раската 1, каландра 2 и наката 3, содержит задатчик 4 интенсивности пуска - торможения агрегата, задатчики 5 и 6 натяжения бумажного полотна в промежутках раскат-каландр и каландр-накат, датчики 7 и 8 радиусов (диаметров) рулонов раската и наката. Электропривод раската 1 состоит из тормозного генератора 9, автоматической системы 10 регулирования ЭДС тормозного генератора, обмотки 11 возбуждения тормозного генератора 9, автоматической системы 12 регулирования тока якоря тормозного генератора, датчика 13 натяжения и регулятора 14 натяжения полотна в промежутке раскат-каландр. Электропривод каландра 2 содержит электродвигатель 15, датчик 16 скорости и автоматическую систему 17 регулирования скорости. Электропривод наката 3 состоит из электродвигателя 18, автоматической системы 19 регулирования ЭДС, обмотки 20 возбуждения электродвигателя 18, автоматической системы 21 регулирования тока, датчика 22 натяжения и регулятора 23 натяжения полотна в промежутке каландр-накат. Система электропривода снабжена также двумя устройствами 241 и 242 компенсации инерционных масс и активными полосно-заграждающими фильтрами 251 и 252.
Сигнал динамической компенсации Uдк на выходе каждого УКИМ, пропорциональный потребляемому динамическому току, определяется формулой
где 

Kот - коэффициент передачи обратной связи АСР тока;
rрн, rр - начальный и текущий радиусы рулона;
rрв - радиус рабочего вала, на который наматывается рулон;
J, Jрв - моменты инерции электродвигателя (генератора) и рабочего вала;
iр, ηp - передаточное число и КПД редуктора между электрической машиной и рабочим валом;
K, Φн - конструктивный коэффициент электрической машины и начальный магнитный поток;
lр - длина рулона;
mоб - удельная масса обрабатываемой бумаги;
p = d/dt.
Уравнение активности полосно-заграждающего фильтра
где Kф - коэффициент передачи фильтра;
T1, T2 - постоянные времени;
ξ - коэффициент демпфирования.
Построенная на основании формул (1) и (2) структурная схема УКИМ с фильтром изображена на фиг. 2, а. Слагаемые, стоящие в квадратных скобках формулы (1), моделируются нелинейным звеном 26 с характерной седлообразной характеристикой, производная dUаф/dt моделируется дифференциатором 27, а произведение полученных составляющих - с помощью блока 28 произведений.
На фиг. 2, б представлена требуемая амплитудная характеристика Wаф активного полосно-заграждающего фильтра. Частота режекции фильтра 1/T1 выбирается равной частоте упругих колебаний ωу механической системы каландра 2, что обеспечивает их надежное подавление на входе УКИМ. При выбранной характеристике полосно-заграждающего фильтра обеспечивается также необходимое подавление высокочастотных пульсаций выходного сигнала датчика скорости (тахогенератора). Вместе с тем при Kф = 1 полосно-заграждающий фильтр пропускает низкочастотные, в частности оборотные, колебания каландра, что позволяет использовать полученную информацию в УКИМ 24 с целью снижения колебаний натяжения бумажного полотна.
УКИМ 14 и активный полосно-заграждающий фильтр 25 могут быть построены на базе микропроцессорного комплекта КР1810 или на аналоговых микросхемах. В качестве электрических машин 5, 15 и 18 могут быть применены машины постоянного тока серии 2П или 4П, в качестве датчиков 13 и 22 натяжения - стандартные прессдуктроные датчики давления, в качестве датчика 16 скорости - импульсный датчик скорости серии ПДФ или тахогенератор постоянного тока, в качестве датчиков 7 и 8 радиусов рулонов - поворотные сельсинные датчики, а задатчики 4, 5, 6, регуляторы 14 и 23 натяжения, АСР 10 и 19 ЭДС, АСР 12 и 21 тока и АСР 17 скорости могут быть выполнены на базе унифицированных цифровых или аналоговых модулей (серия УБСР).
Электропривод суперкаландра работает следующим образом. С помощью задатчика 4 интенсивности задают темп разгона и торможения электропривода каландра 2 (главного привода), определяющего скорость всего агрегата. Назначением системы являетая поддержание заданного натяжения бумажного полотна как в режимах разгона - торможения, так и при установившейся скорости агрегата. Поддержание заданного натяжения полотна в режиме постоянства скорости агрегата осуществляется с датчиков 13 и 22 натяжения и регуляторов 14, 23 натяжения. Указанные устройства реализуют регулирование по отклонению и подавляют возможные технологические возмущения (вариации параметров обрабатываемого полотна, изменение моментов сопротивления раската и наката и др.).
С помощью УКИМ 241 и 242 осуществляется регулирование по возмущению - изменению скорости каландра 2 путем формирования сигнала динамической компенсации Udki (динамического тока) раската 1 и наката 3 с целью компенсации влияния их моментов инерции на процессы регулирования натяжения полотна в периоды пуска-торможения агрегата, а также при возмущениях на каландре 2 (изменение момента сопротивления, дисбаланс рабочих валов и др.). Таким образом, предлагаемая система электропривода суперкаландра имеет комбинированное управление по отклонению и по возмущению (комбинированная система регулирования).
Формирование динамического тока УКИМ 241 и 242 происходит следующим образом. Выходной сигнал датчика 16 скорости поступает на активные полосно-загражающие фильтры 251 и 252, где осуществляется подавление упругих колебаний ωу и высокочастотных пульсаций и выделение достаточно гладкого сигнала, пригодного для дифференцирования. Таким образом фильтры обеспечивают необходимую помехоустойчивость АСР 12 и 21. Сигнал с выхода каждого полосно-заграждающего фильтра 251 и 252 поступает на собственное дифференцирующее звено 27 и далее на блок 28 произведений, где перемножается с выходным сигналом нелинейного звена 26. Выходной сигнал УКИМ 241 и 242 Udki подается на входы АСР 12 и 21 тока раската 1 или наката 3, создавая динамический ток. Необходимые значения динамического тока вырабатываются как в периоды пуска - торможения агрегата, так и при колебаниях скорости каландра 2, вызванных возмущающими воздействиями, что обеспечивает форсированную подрегулировку скоростей раската 1 и наката 3 в направлении поддержания заданного натяжения обрабатываемого полотна в промежутках раскат-каландр и каландр-накат.
Изобретение может быть использовано в многодвигательных взаимосвязанных электроприводах постоянного тока отдельных агрегатов по обработке полосовых материалов, в частности суперкаландров бумагоделательного производства.
Источники информации, принятые при составлении заявки:
1. Барышников В.Д., Куликов С.Н. Автоматизированные электроприводы машин бумагоделательного производства. - Л.: Энергоатомиздат, 1982, с. 132-135.
2. Шестаков В. М. Автоматизированные электроприводы бумаго- и картоноделательных машин. - Л.: Лесная промышленность, 1978.
3. Материалы фирмы "Asea Brown BOVERI, ABB Drives'. - ABB, 1994.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД БУМАГОДЕЛАТЕЛЬНОЙ МАШИНЫ | 2002 |
|
RU2203997C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ПРИВОД КОНВЕЙЕРНЫХ СИСТЕМ | 1996 |
|
RU2111158C1 |
| Автоматическая система управления намоткой бумажного полотна | 1989 |
|
SU1657561A1 |
| Регулятор натяжения рулонных материалов | 1977 |
|
SU730630A1 |
| Регулятор натяжения рулонных материалов | 1983 |
|
SU1148828A1 |
| Автоматическая система управления намоткой бумажного полотна | 1989 |
|
SU1657560A1 |
| Устройство для автоматического регулирования натяжения при перемотке ленточного материала | 1983 |
|
SU1131810A2 |
| Устройство для регулирования натяжения материала при перемотке | 1979 |
|
SU856959A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ПРИВОД КОНВЕЙЕРНЫХ СИСТЕМ | 1997 |
|
RU2136570C1 |
| Устройство для регулирования скорости и натяжения длинномерного материала при перемотке | 1983 |
|
SU1151501A2 |

Многодвигательный электропривод суперкаландра, использующийся во взаимосвязанных системах отделочных агрегатов по обработке полосовых материалов. Устройство содержит задатчик интенсивности, задатчики натяжения обрабатываемого полотна, датчики радиусов рулонов раската и наката, электропривод раската, содержащий тормозной генератор (ТГ), автоматическую систему регулирования (АСР) ЭДС ТГ, АСР тока якоря ТГ, датчик и регулятор натяжения, электропривод каландра, содержащий электродвигатель, датчик скорости и АСР, скорости, электропривод наката, содержащий электродвигатель, АСР ЭДС и тока якоря двигателя, датчик и регулятор натяжения. Электропривод имеет устройства компенсации инерционных масс (УКИМ) с полосно-заграждающими активными фильтрами, входы которых соединены с выходом датчика скорости каландра, их выходы подключены к первым входам УКИМ, вторые входы которых соединены с датчиками радиусов рулонов раската и наката. Достигаемый технический результат - повышение точности регулирования натяжения бумажного полотна, помехоустойчивости и надежности работы в переходных и квазистационарных режимах функционирования агрегата. 2 ил.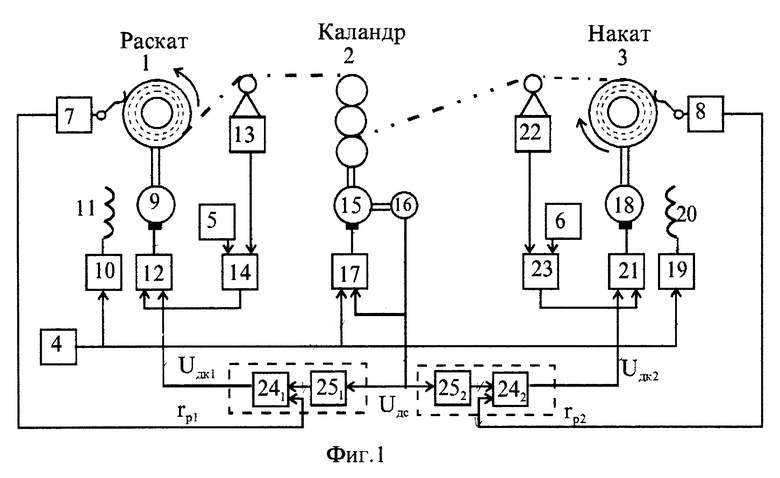
Многодвигательный электропривод суперкаландра, содержащий задатчик интенсивности, задатчики натяжения обрабатываемого полотна в промежутках раскат - каландр и каландр - накат, датчики радиусов рулонов раската и наката, а также электропривод раската, содержащий тормозной генератор, автоматическую систему регулирования ЭДС тормозного генератора, вход которой соединен с задатчиком интенсивности, а выход - с обмоткой возбуждения тормозного генератора, автоматическую систему регулирования тока якоря тормозного генератора, датчик натяжения и регулятор натяжения, причем выход датчика связан с вторым входом регулятора, первый вход которого подключен к выходу задатчика натяжения раскат - каландр, а выход - к первому входу автоматической системы регулирования тока якоря тормозного генератора, электропривод каландра, содержащий электродвигатель, датчик скорости на его валу, автоматическую систему регулирования скорости, первый вход которой соединен с задатчиком интенсивности, а второй вход - с датчиком скорости, и электропривод наката, состоящий из электродвигателя, автоматической системы регулирования ЭДС этого двигателя, вход которой соединен с задатчиком интенсивности, а выход - с обмоткой возбуждения электродвигателя, автоматическую систему регулирования тока якоря двигателя, датчика натяжения и регулятора натяжения, причем выход связан с вторым входом регулятора, первый вход которого подключен к выходу задатчика натяжения каландр - накат, а выход - к первому входу автоматической системы регулирования тока якоря двигателя, отличающийся тем, что он имеет устройства компенсации инерционных масс с полосно-заграждающими активными фильтрами, входы которых соединены с выходом датчика скорости каландра, их выходы подключены к первым входам устройств компенсации инерционных масс, вторые входы которых соединены с датчиками радиусов рулонов раската и наката, а выходы устройств компенсации инерционных масс связаны соответственно с вторыми входами автоматических систем регулирования токов якоря тормозного генератора и двигателя наката.
| Asea Brown Boveri, ABB, Drives.-ABB, 1994, SU 1601731 A1, 23.10.90 | |||
| SU 760369 A, 03.09.90 | |||
| Способ регулирования натяжения материалаНА НЕпРЕРыВНО-пОТОчНыХ АгРЕгАТАХС МНОгОдВигАТЕльНыМи РЕгулиРуЕМыМипО СКОРОСТи элЕКТРОпРиВОдАМи | 1979 |
|
SU853761A1 |
| US 4525654 A, 25.01.85. | |||
