Изобретение относится к намоточно- р аз мото ч ном у о борудо в а н и ю.
Цель изобретения - повышение точности регулирования натяжения.
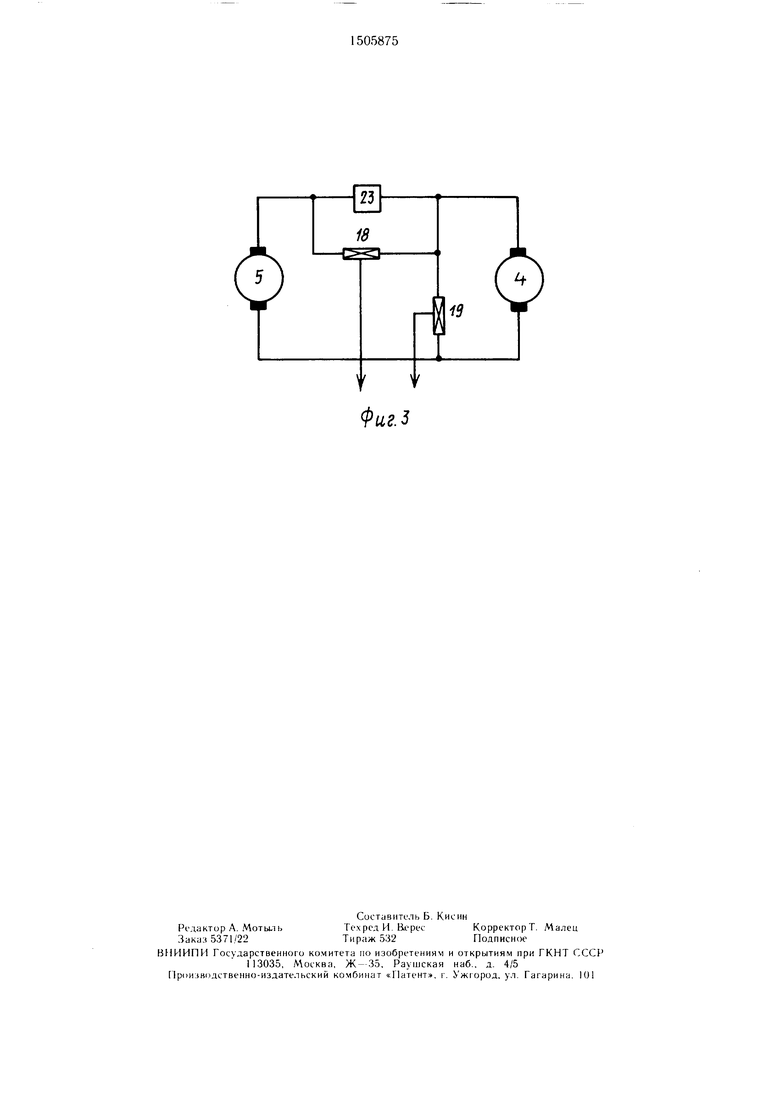
На фиг. I представлена блок-с.хема устройства; на фиг. 2 и 3 - варианты нодклю- чения датчиков напряжений.
Устройство содержит накат I и раскат 2 материала (полотна) 3, кинематически связанные с электродвигателем 4 и тормозным генератором 5. Датчики 6 и 7 угловой скорости электродвигателя 4 наката и тормозного генератора , а также датчик 8 скорости (линейной) наката выполнены, например, в виде тахогенераторов. Регулятор 9 скорости через согласующий усилитель Ю соединен с обмоткой I I возбуждения электродвигателя 4. Выход датчика 8 соединен с одним входом элемента 12 сравнения, другой вход которого подключен к выходу задат- чика 13 скорости наката, а выход - к входу регулятора 9. Элемент 14 сравнения своими входами связан с выходом звена 15 согласования, входом соединенного с выходом датчика 8, с выходом согласующего уси,1ите- ля IB, входом связанного с выходо.м датчика 6, с вьгходом согласующего усилителя 17, входом подключенного к выходу датчика 7, и с выходами датчиков 18 и 19 напряжения. Выход эле.меита 14 сравнения через регулятор 20 натяжения и согласующий усилитель 2 соединен с обмоткой 22 возбуждения генератора 5. Якоря электродвигателя 4 и генератора 5 включены последовате, 1ьно и связаны с вентильным преобразователем 23, работающим в режиме независимого источника тока.
Датчик 18 может быть подключен к якорю электродвигателя 4, а датчик 19 - к якорю генератора 5. Во втором варианте датчик 18 может быть подключен к зажимам преобразователя 23, а датчик 19 - к якорю генератора 5. В третьем варианте, который тождественен второму, датчик 18 подключен к зажимам преобразователя 23, а датчик 19-- к якорю электродвигателя 4.
сл
о
СП
00
СП
Устройство работает следующим образом.
Регулирование скорости перемотки осуществляется путем воздействия на ток возбуждения, а значит и на момент электродвигателя 4 наката. При этом сигнал задания линейной скорости, поступающий от задат- чика 13, сравнивается в элементе 12 сравнения с сигналом обратной связи, поступающим от датчика 8 скорости наката. Полученный в результате сравнения разностный управляющий сигнал поступает на вход регулятора 9 скорости, который через согласую щий усилитель 10 воздействует на ток обмотки 11 возбуждения электродвигателя 4 наката. Так как ток якорной цепи остается неизмен ны.м, момент электродвигателя 4 наката однозначно определяется током его возбуждения, т. е. с увеличением тока возбуждения момент двигателя растет, а с уменьщением - снижается, что и позволяет регулировать линейную скорость материала.
Регулирование натяжения осуществляется по косвенному параметру путем воздействия на магнитный поток, а значит и на момент тормозного генератора 5. При этом в элементе 14 сравнения производится алгебраическое суммирование сигнала задания, поступающего от датчика 8 скорости наката через звено 15 согласования, корректирую- щи.х задание сигналов, поступающих от датчиков 6 и 7 угловых скоростей соответственно электродвигателя 4 и тормозного генератора 5 через согласующие усилители 16 и 17, а также двух сигналов обратных связей по напряжению, поступающих от датчиков 18 и 19 напряжения.
Полученный в резу;1ьтате суммирования в элементе 14 сравне)1ия сигнал поступает на вход регулятора 20 натяжения, который через согласующий усилитель 21 воздействует на ток обмотки 22 возбуждения тор.моз- ного генератора 5, а следовательно, и на развиваемый им .момент. При этом предлагаемая структура обратной связи по сумме напряжений двух элементов силовой цепи, а также структура цепей коррекции задающего сигнала в контуре (косвенного) регулирования натяжения позволяет полностью устранить отрицательное влияние на точность регулирования натяжения как температурных изменений сопротивления якорей электрических мащин, так и моментов холостого хода на их валах.
В пре.т.лагае.мом устройстве для возможно более полного использования установленной мощности силового электрооборудования в качестве электродвигателя 4 наката и тормозного генератора 5 раската должны быть применены одинаковые электрические машины, а это обеспечит равенство их якорных сопротивлений и примерное равенство моментов холостого хода.
Возможны три сочетания подключения датчиков напряжения к элементам силовой схемы.
Для первого, когда датчики 18 и 19 напряжения подключены соответственно к якорям электродвигателя 4 и генератора 5, сумма напряжений якорей тождественно равна сумме их ЭДС, поскольку падения напряжения на якоре каждой мащины будут равны по величине и направлены встречно в связи с тем, что равны их сопротивления и по ним протекает один и тот же ток, который при одинаковых условиях охлаждения вызывает одинаковый их нагрев, т. е.
, + 6, (Л -/./,+Ур+/л, ,
(1)
где UH , Up - соответственно напряжения на якоре двигателя 4 наката и генератора 5 раската;
Ей, Ер -соответственно ЭДС двигателя 4 наката и генератора 5 раската;
/,-сопротивление якорей электрических MaujHH; /- ток, протекающий по якорной
цепи.
В установивщемся режиме перемотки натяжение полотна со стороны наката может быть выражено как
0
Т
At -Л}„ Л -Ф. -/-Mt
RHRH
или со стороны раската
Л1,,-Л1о К-Фр-1-Мп
Rn
(2)
(3)
где Т- натяжение полотна;
Л1«, Мр - соответственно электромагнитные моменты двигателя 4 наката и генератора 5 раската;
.Vfo - момент холостого хода на валах наката и раската;
К- конструктивный коэффициент
электрических мащин;
, магнитный поток соответственно электродвигателя 4 наката и генератора 5 раската.
Поскольку (2) и (3) выражают одну и ту же величину, К-Фн имеет следующий вид:
Л .(/(.фр./ + Л1о)+Мо|.
(4)
Учитывая, что линейная скорость 1 полотна может быть выражена через угловые скорости и радиусы рулонов наката и раската как
Vj, 0), RH wp-Rp,
(5)
записывают выражения для ЭДС («) двигателя 4 и тормозного генератора 5 (Ер)
- /(.Ф, -ш, /(.ф„ .;
А
Ер К-Фр-Шр К-Фр-.
Кр
(6)
(7)
Из (1) с учетом (6) и (7) вытекает, что
// JL.II I/ Р
U, + U, V (- -).(8)
Подставив (4) в (8), получают
,1/ Ф%() +
Р//,
Г2./(.фр .Мо// . f
LD
Л1о/2 I Ч
т W )J
рI Лл /Хр
Сумма напряжений якорей электродвигаеля 4 и генератора 5 автоматически подерживается на уровне
U, +U,Ku-(, +/С,.ы„-/Сз-ыД (10)
Li, +Ь р де Ли -JTкоэффициент передачи
контура косвенного регулирования натяжения (t/.i - напряжение задания, снимаемое с выхода звена 15 согласова- (Узния);
i коэффициент пропорцио нальности между задающим напряжением и линейной скоростью полотна (величина этого коэффициента определяет заданный уровень натяжения, а регулируется при помощи звена 15 согласования) ;
2, Кз- коэффициенты приведения угловых скоростей наката и раската соответственно к входам узла 14 сравнения (регулируются посредством регулирования коэффициентов усиления усилителей 16 и 17).
С учетом (5), (10) примет вид
6.+t/,/(..V.(/C,). (11)
AM Кр
Приравняв правые части (9) и (11), ре- ают полученное уравнение относитепьно -Фр
.Ф,§Г.У,.(Л-,.З)ОХ
)b(12)
Подставляя (12) в (3), получают
/..(/с, + Ь)(+
Т
м,, Rp
г-R,
4Окончательно после раскрытия скобок приведения подобных членов получают
Ки-К-2-I/Vfi,
2-/ 2./
-j--K. +
Ки /Сз /, Л/о I (
2.
Из (13) следует, что при условии / const для устранения влияния на натяжение полотна моментов холостого хода на валах наката и раската необходимо и достаточно подобрать коэффициенты К.2 и Кз так, чтобы были равны числители второго и третьего, а также четвертого и пятого членов (13).
И в этом случае натяжение полотна в уста- новивщемся режиме перемотки определяется как
Т 4--Ки-К,-1,
(14)
т. е. при постоянных значениях тока якорной 0 цепи и коэффициента Ки величина натяжения однозначно определяется значением коэффициента передачи звена 15 согласования, который может изменяться от нулевого до максимального значения, что и обеспечит 5 в предлагаемом устройстве регулирование натяжения от нулевого до максимального. Как следует из приведенных выражений (13) и (14), температурные отклонения сопротивлений якорей электрических мащин на точность регулирования натяжения не 0 влияют, поскольку указанные сопротивления в эти выражения не входят, что и подтверждает достижение поставленной в изобретении цели.
При втором возможном сочетании подключения датчиков напряжения, когда дат- 5 чк 18 подключен к зажимам вентильного преобразователя 23, а датчик 19 - к якорю тормозного генератора 5, для достижения поставленной цели нужно, чтобы в элементе 14 сравнения масщтаб сигнала, поступающего от датчика 18, был вдвое больще, чем поступающего от датчика 19. Этого можно добиться, установив коэффициенты передачи датчиков 18 и 19 в соотнощении 1:2. Мощность, передаваемая из вентильного преобразователя 23 в якорную цепь, расхо- 5 дуется на покрытие тепловых потерь в якорях электрических мащин и потерь холостого хода, поскольку сам процесс перемотки энергетических затрат не требует, ведь мощность, потребляемая для этой цели двигателем 4 наката, возвращается в якорную цепь гене- 0 ратором 5 раската. Или иначе
./,+Л1о(а)„Ч-Шр),(15)
а напряжение на выходе преобразователя 23 равнолл 1/ J
..R,+ .(1--±}. ,16)
Если сложить напряжение на якоре тормозного генератора 5 и половину напряже/
U -j--MJ Ku-V,
Приравнивая л( получают
Д-.ф„ ./(„-(/(1 +
K.«

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости и натяжения длинномерного материала при перемотке | 1983 |
|
SU1151501A2 |
| Устройство для регулирования скорости и натяжения длинномерного материала при перемотке | 1982 |
|
SU1043093A1 |
| Устройство для автоматического регулирования натяжения при перемотке ленточного материала | 1983 |
|
SU1131810A2 |
| Устройство для регулирования скорости и натяжения длинномерного материала при перемотке | 1977 |
|
SU674964A1 |
| Регулятор натяжения рулонных материалов | 1985 |
|
SU1366469A1 |
| Устройство для автоматического регулирования натяжения при перемотке ленточного материала | 1975 |
|
SU727546A1 |
| Устройство для регулирования натяжения материала при перемотке | 1979 |
|
SU856959A1 |
| Автоматическая система управления намоткой бумажного полотна | 1989 |
|
SU1657561A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД СУПЕРКАЛАНДРА | 1997 |
|
RU2131641C1 |
| Регулятор натяжения рулонных материалов | 1983 |
|
SU1148828A1 |

Изобретение относится к намоточно-размоточному оборудованию. Цель изобретения - повышение точности регулирования натяжения. В устройстве в качестве задающего сигнала для контура косвенного регулирования натяжением используется сигнал, пропорциональный линейной скорости материала, в качестве корректирующих задание сигналов используются сигналы, пропорциональные угловой скорости электродвигателя наката и тормозного генератора раската, а в качестве сигнала обратной связи - сумма напряжений, снимаемых с двух элементов общей якорной цепи. Все перечисленные сигналы алгебраически складываются и определяют величину момента, развиваемого тормозным генератором для создания натяжения. 3 ил.
C
2-/
X
(201
Подставив (20) в (3) и выполнив соот- 55 ветствующие преобразования, получают
/ Д ,,-Л |
м.
/+
Д ы Ки Кл I
К.НHf,
м.
2-R,
(21)
2-R н
Но (21) это то же самое, что и (13).
При третьем сочетании подключения датчиков напряжения, когда датчик 18 подключен-к зажи.мам преобразователя 23, а датчик 19 - к зажимам якоря электродвигателя 4, для достижения поставленной цели нужно оставить масштабы сигналов от датчиков 18 и 19 такими же, как и в предыдущем случае, но знаки этих сигналов сделать проТИВОПО.1ОЖНЫМИ.
Тогда по аналогии с (17) иолучают
или с учетом (6) получают
111/
- Л О - V
К (IV
Ян
По аналогии с (19) получают
-J(± + ± (23) 2.Г/ /,/
+5,(|.)1
и после подстановки (25) вующих преобразований
(25)
в (2) и соответстТ Ки-К -1+
Ки-Кг-1 Кп-Кл-1
Л.
к.
/4 2R,
М,
(26)
0
5
30
5
40
Сравнение выражений (13), (21) и (26) показывает, что они идентичны, т. е. поставленная цель будет достигнута при любом сочетании подключений датчиков напряжений к двум элементам силовой цепи.
Формула изобретения
Устройство для регулирования натяжения длинномерного материала, содержащее электродвигатель наката и тормозной генератор раската, якори которых соединены последовательно и связаны с выходом вентильного преобразователя, датчик и задат- чик скорости наката, через первый элемент сравнения и регулятор скорости подключенные к обмотке возбуждения электродвигателя наката, второй элемент сравнения, первым и вторым входами соединенный соответственно с выходами датчиков скорости наката и угловой скорости тормозного генератора раската, а выходом через регулятор натяжения - с обмоткой возбуждения тормозного генератора раската, и датчики напряжения, первый из которых подключен к зажимам якоря тормозного генератора раската, отличающееся тем. что, с целью повышения точности регулирования натяжения, оно снабжено датчиком угловой скорости электродвигателя наката, второй датчик напряжения подключен или к зажимам якоря электродвигателя наката, или к зажимам вентильного преобразователя, а выходы датчиков угловой скорости электродвигателя наката и напряжений подключены соответственно к третьему, четвертому и пятому входам второго элемента сравнения.
i
J
21
19
7
1,
18
11
Физ.1
| Устройство для регулирования скорости и натяжения длинномерного материала при перемотке | 1983 |
|
SU1151501A2 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
