х
V3U

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая система управления намоткой бумажного полотна | 1989 |
|
SU1657561A1 |
| Автоматическая система управления намоткой бумажного полотна | 1989 |
|
SU1657560A1 |
| Система управления параметрами движения полосового и пленочного материала | 1986 |
|
SU1471237A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД СУПЕРКАЛАНДРА | 1997 |
|
RU2131641C1 |
| Автоматическая система управления намоткой бумажного полотна | 1986 |
|
SU1452876A1 |
| Автоматическая система управления намоткой бумажного полотна | 1988 |
|
SU1567709A1 |
| Регулятор натяжения рулонных материалов | 1985 |
|
SU1366469A1 |
| Устройство для автоматического регулирования натяжения при перемотке ленточного материала | 1983 |
|
SU1131810A2 |
| Устройство для автоматического регулирования натяжения при намотке рулонного материала | 1988 |
|
SU1595774A1 |
| Электропривод моталки прецизионного агрегата | 1984 |
|
SU1288876A1 |

Изобретение относится к автоматизации оборудования для переработки бумаги. Целью изобретения является повышение скорости намотки рулонов бумаги. Автоматическая система управления намоткой бумажного полотна содержит задатчик скорости 1, эадатчик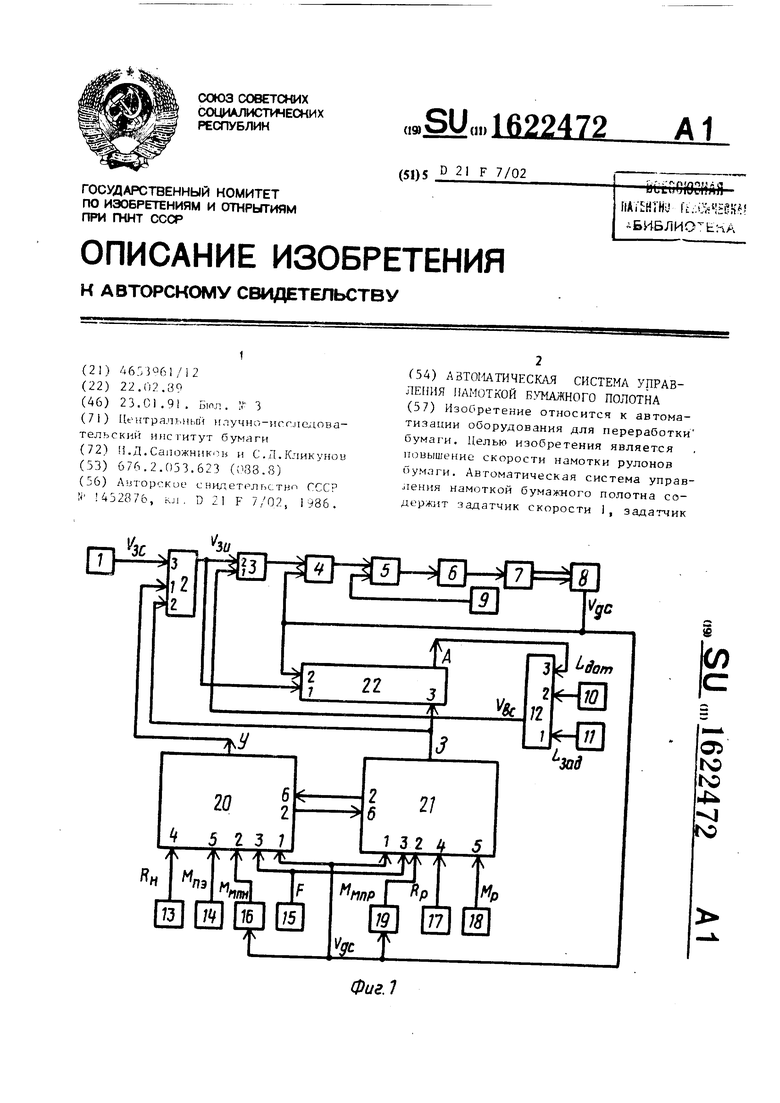
Vgc
от
§
к/
/2
о
to
1
К
77
т
Фиг. 1
интенсивности 2 разгони и торможения, блок выбора 3 задающего сигнала регулятора скорости намотки 4, регулятор тока 5, усилитель мошнос- ги 6, приводной электродвигатель 7, датчик скорости 3, вход которого связан с валом электродвигателя, а выход соединен с вторым входом регулятора скорости 4, датчик тока 9, выход которого соединен с вторым входом регулятора тока 5, датчик 10, задатчик 11 длины полотна и вычислитель скорости
намотки, первый и второй входы
Изобретение относится к устройствам дляуправления скоростью намотки бумажного полотна на оборудовании д. переработки бумаги: продольно - резательном станке, перемотном станке, суперкаландрс и т.д.
Целью изобретения является повышение скорости намотки рулонов бумаги.
На фиг . 1 представлена общая схема автоматической системы управления намоткой бумажного полотна; на фиг. 2 - схема вычислителя скорости намотки; на фиг. 3 - схема задатчика интенсивности разгона и торможения; на фиг.4 - схема блока памяти; на фиг. 5 - схема вычислителя ускорения на раскате; на фиг. 6 - схема вычислителя ускорения на накате; на фиг. 7 - схема датчика механических потерь.
Система (фиг.1) содержит задатчик 1 скорости намотки, задатчик 2 интенсивности разгона и торможения, последовательно соединенные блок 3 выбора задающего сигнала, регулятор 4 скорости намотки, регулятор 5 тока, усилитель 6 мощности и приводной электродвигатель 7, датчик 3 скорости, вход которого кинематически связан с валом приводного электродвигателя, а выход электрически соединен с вторым входом регулятора 4 скорости, датчик 9 тока,выход которого соединен с вторым входом регулятора 5 тока, датчик 10 и злдат чик 11 длины полотна и вычислитель 12 скорости намотки, первый и второй входы которого соединены соотве
которого соединены с задатчиком 11 и датчиком 10, а выход - с вторым входом блока выбора задающего сигнала. Система включает также датчик радиуса рулона на накате 13, задатчик момента приводного электродвигателя 14, датчик натяжения 15 полотна, датчик механических потерь на накате 16, датчик радиуса рулона на раскате 17, задатчик момента раската 18, датчик механических потерь на раскате 19, вычислитель ускорения на накате 20, вычислитель ускорения на раскате 21 и блок памяти 22. 7 ил.
5
0
5
0
5
0
5
ственно с задатчиком 11 и датчиком 10 длины, а выход с вторым входом блока 3 выбора задающего сигнала.
Система имеет датчик 13 радиуса рулона на накате, задатчик 14 момента приводного электродвигателя, датчик 15 натяжения полотна, датчик 16 механических потерь на накате, датчик 17 радиуса рулона на раскате,задатчик 13 момента раската, датчик 19 механических потерь на раскате,вычислитель 20 ускорения на накате,вычислитель 21 ускорения на раскате, блок 22 памяти.
Первые выходы вычислителей 20 и 21 ускорения подключены соответственно к первому и второму входам задатчика 2 интенсивности разгона и торможения, третий вход которого соединен с выходом задатчика 1 скорости, а выход соединен с вторым входом блока 3 выбора задающего сигнала и первым входом блока 22 памяти, выход которого соединен с третьим входом вычислителя 12 скорости намотки, а второй вход соединен с выходом датчика 3 скорости, первыми входами вычислителей ускорения на накате 20 и раскате 21 и входами датчиков 16 и 19 механических потерь, иыходы которых соединены соответственно с вторыми входами вычислителей 20 и 21 ускорения, третьи входы которых соединены с. выходом датчика 1 5 натяжения полотна, четвертые, входы соединены соответственно с: выходами датчиков радиусов рулонов на накате 13 и раскате 17, пятые входы соединены
о u т но тс I нгнно с выходами задлтчика 14 момента приводного двигателя и задатчика 18 момента раската,первый выход вычислителя 21 ускорения на раскате соединен с третьим входом блока 22 памяти, а второй выход подключен к шестому входу вычислителя
20ускорения на накате, второй
выход которого соединен с шестым входом вычислителя 21 ускорения на раскате.
Система управления работает следующим образом.
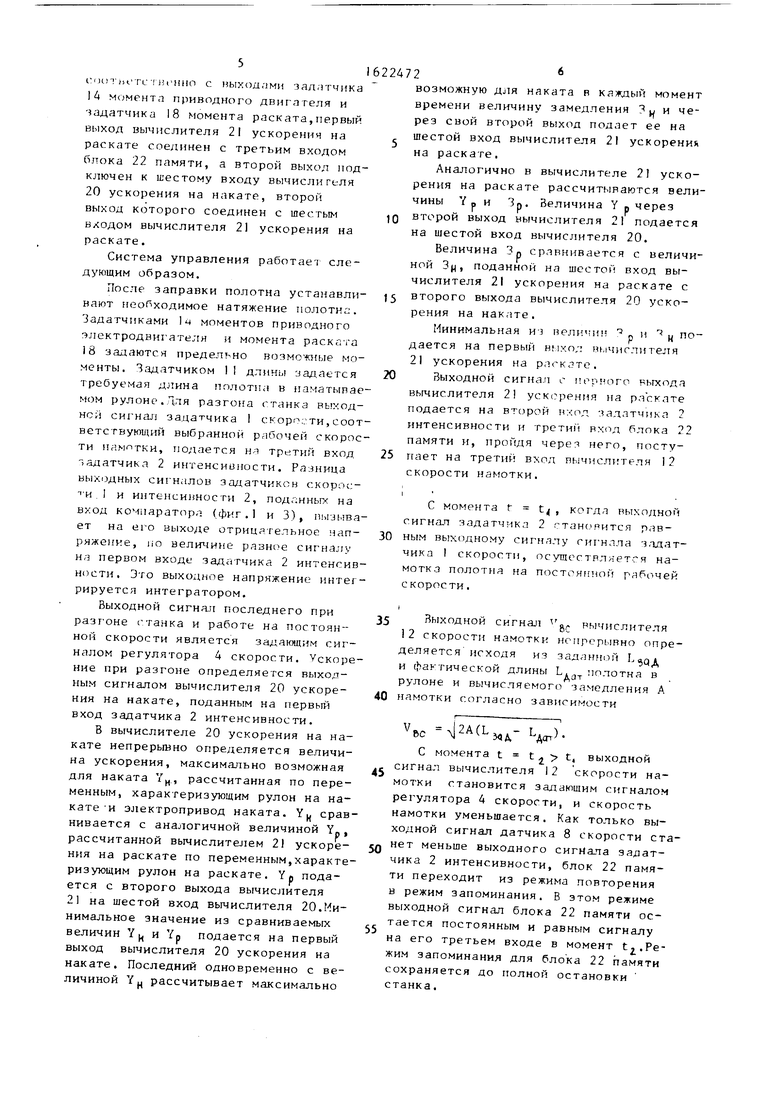
После заправки полотна устанавли- нают необходимое натяжение полотне. Задатчиками 1ч моментов приводного электродвигатели и момента раската 18 задаются предельно возможные моменты. Задатчиком 11 длины задается требуемая длина полотна в наматываемом рулоне.Чля разгона станка выходной сигнал задатчика 1 CKOP.VTH, соответствующий выбранной рабочей скорости наметки, подается ня третий вход тадатчикл 2 интенсивности. Разница выходных сигналов эадатчиков скорости I и интенсивности 2, поданных на вход компаратора (фиг.1 и 3), пызыва ет на его выходе отрицательное нап- ряжение, по величине разное сигналу ня первом входе задатчика 2 интенсивности. Это выходное напряжение интегрируется интегратором.
Выходной сигнал последнего при разгоне станка и работе на постоянной скорости является задающим сигналом регулятора 4 скорости. Ускорение при разгоне определяется выходным сигналом вычислителя 20 ускорения на накате, поданным на первый вход задатчика 2 интенсивности.
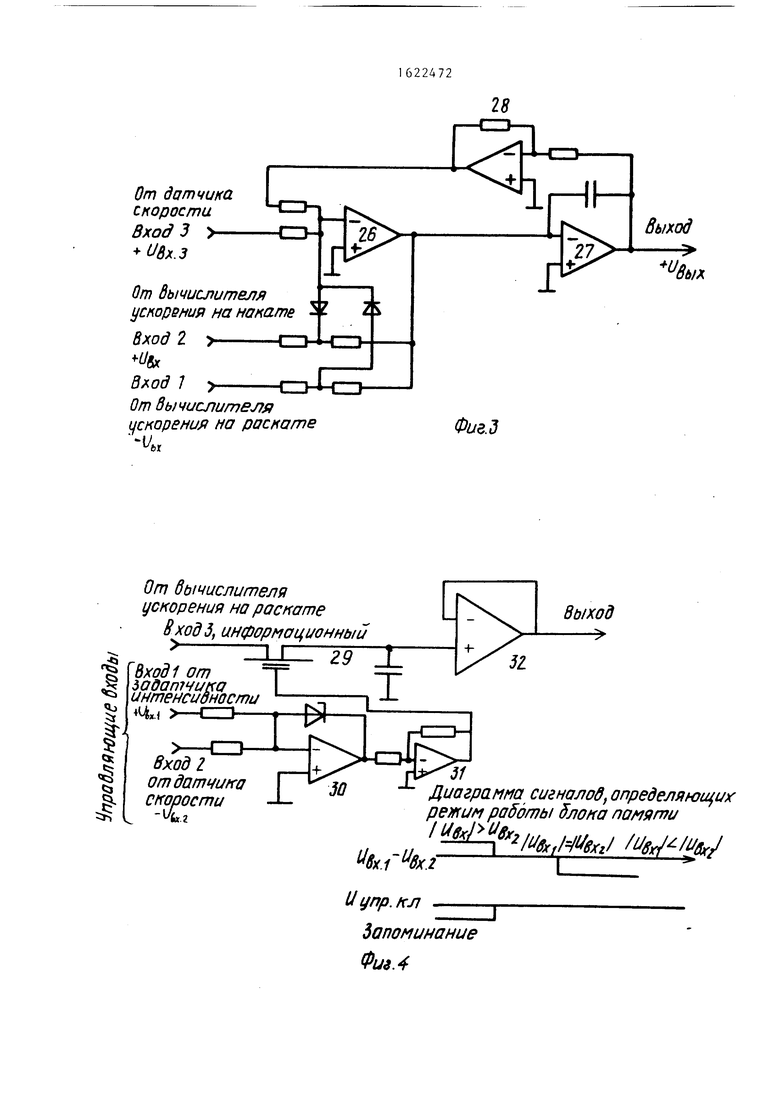
В вычислителе 20 ускорения на накате непрерывно определяется величина ускорения, максимально возможная для наката YH, рассчитанная по переменным, характеризующим рулон на накате и электропривод наката. Y сравнивается с аналогичной величиной Y-, рассчитанной вычислителем 21 ускоре- ния на раскате по переменным,характеризующим рулон на раскате. Yp подается с второго выхода вычислителя
21на шестой вход вычислителя 20.Минимальное значение из сравниваемых величин Y и Yn подается на первый выход вычислителя 20 ускорения на накате. Последний одновременно с величиной YH рассчитывает максимально
возможную для наката в каждый момент времени величину замедления и через свой второй выход подает ее на шестой вход вычислителя 21 ускорении на раскате.
Аналогично в вычислителе 21 ускорения на раскате рассчитываются величины Y
и
Величина Y Dчерез
Р
Р V второй выход вычислителя 21 подается
на шестой вход вычислителя 20.
Величина Зр сравнивается с величиной Зц, поданной на шестой вход вычислителя 21 ускорения на раскате с второго выхода вычислителя 20 ускорения на наклте.
Минимальная из величин - и г н подается на первый ннход вычислителя 21 ускорения на рлгкдте.
Выходной сигнал с первого выхода вычислителя 21 ускорения на раскате подается на второй вход задлтчика 2 интенсивности и третий вход блока 2 памяти и, пройдя через него, поступает на третий вход вычислителя 12 скорости намотки.
С момента Г t, когда выходной сигнал задатчнкл 2 гтанояится равным выходному сигналу сигнала злдят- чика I скорости, осуществляется намотка полотна на постоянной рабочей скорости.
i
Выходной сигнал gr вычислителя 12 скорости намотки непрерывно определяется исходя из заданной
и фактической длины L, полотна в
дат
рулоне и вычисляемого замедления А намотки согласно зависимости
V.
J2A(L
34 А ЬДот): t Ј t, ВЫХОДНОЙ
вычислителя 12 скорости наВС
С момента сигнал
мотки становится задающим сигналом регулятора 4 скорости, и скорость намотки уменьшается. Как только выходной сигнал датчика 8 скорости стнет меньше выходного сигнала эадат- чика 2 интенсивности, блок 22 памяти переходит из режима повторения в режим запоминания. В этом режиме выходной сигнал блока 22 памяти остается постоянным и равным сигналу на его третьем входе в момент t.Режим запоминания для блока 22 памяти сохраняется до полной остановки станка.
3 момент t t, когда в рулон намотано полотно заданной длины,станок останавливается.
3 случае необходимости остановить станок до окончания намотки рулона выключают задатчик 1 скорости.При этом на выходе компаратора появляется сигнал, определяемый сигналом на втором входе задатчика 2 интенсивности, который уменьшает до нуля сво выходной сигнал.
Система обеспечивает повышение скорости намотки рулона бумаги за счет создания максимальных ускорений при разгоне и торможении станка.
Формула изобретения
Автоматическая система управления намоткой бумажного полотна,содержащая последовательно соединенные блок выбора задающего сигнала,регулятор скорости намотки, регулятор тока, усилитель мощности, приводной электродвигатель и датчик скорости, выход которого соединен с вторым входом регулятора скорости намотки, чадатчик скорости и датчик тока,выход которого соединен с вторым входом регулятора тока, датчик и задатчик длины полотна, выходы которых соединены соответственно с первым и вторым входами вычислителя скорости намотки, выход которого соединен с первым входом блока выбора задающего сигнала, отличающаяся тем, что, с целью увеличения скорости намотки полотна, она содержит задатчик интенсивности разгона и торможения, блок памяти, датчики радиусов
К задатчику длины
К датчику длины
Вход 3
К блоку памяти
0
5
-.
0
5
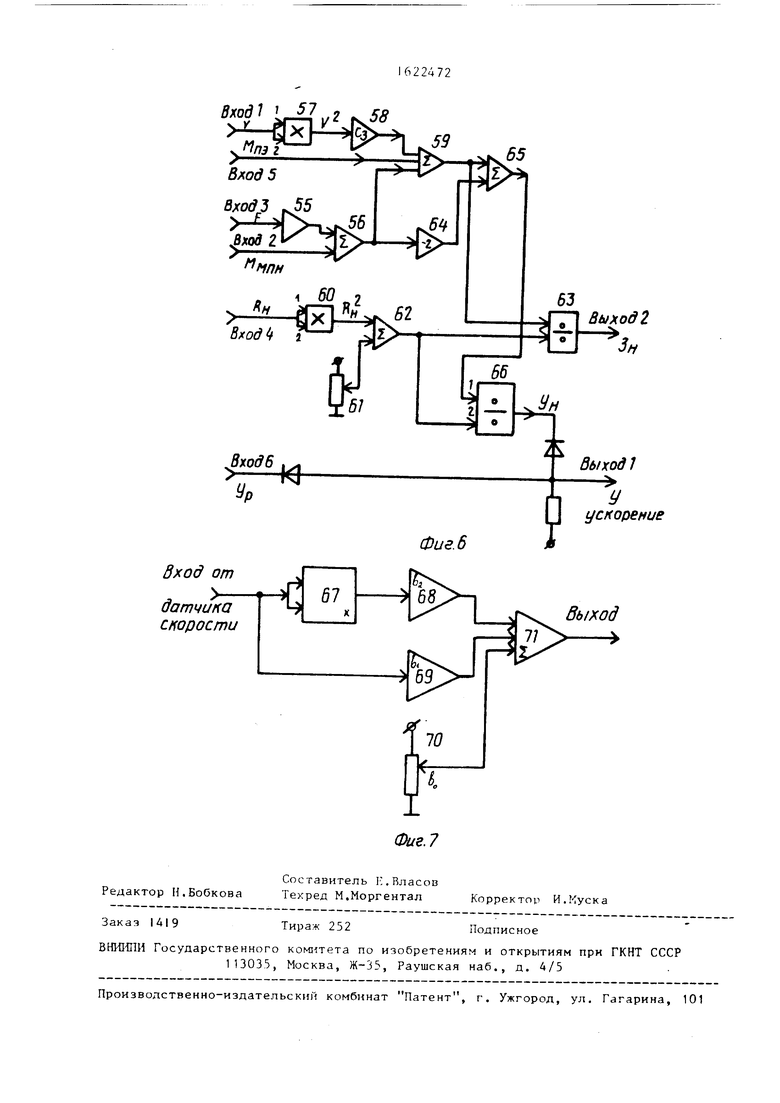
рулонов на накате и раскате,задатчик момента приводного электродвигателя, датчик натяжения полотна, датчики механических потерь на накате и раскате, задатчик момента раската и вычислители ускорения на накате и раскате, первые выходы которых подключены к первому и второму входам задатчика интенсивности разгона и торможения, третий вход которого соединен с выходом задатчика скорости, а выход соединен с вторым входом блока выбора задающего сигнала и первым входом блока памяти, выход которого соединен с третьим входом вычислителя скорости намотки, а второй вход соединен с выходом датчика скорости, первыми входами вычислителей ускорения на накате и раскате и входами датчиков механических потерь на накате и раскате, выходы которых соединены соответственно с вторыми входами вычислителей ускорений на накате и раскате, третьи входы которых соединены с выходом датчика натяжения, четвертые входы соединены соответственно с выходами датчиков радиусов рулонов на накате и раскате,пятые входы соединены соответственно с выходами задатчика момента приводного электродьи атнпя и -лд.. м.ка момента раската, iievm-.-i ВЫУ, , j.j .ислителя ускоренн - л. . соединен с третьим -ходом о.гэга памяти, а второй внхсд одключе: к шестому входу вычислит:ля ускорения на накате,второй выход которого соединен с шестым входом вычислителя ускорения на раскате .
Фиг. 2
От датчика скорости
Вход 3 у- + Увх.з
От Вычислителя ускорения на накате
Вход 2
+U&
Вход 1 -От Вычислителя искоренил на раскат
Л/д
Фие.д
Запоминание Фиг.4
-ЦхГМ/пг Яр
Замедление 3
Фиг. 5
Вход 5 BxodJ 55
Редактор Н.Бобкова
Составитель К.Власов Техред М.Моргентал
Заказ 1419
Тираж 252
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
64
63
Выход 2
У ускорение
Фиг. 6
Фиг. 7
Корректор И.Куска
Подписное
| Автоматическая система управления намоткой бумажного полотна | 1986 |
|
SU1452876A1 |
