Изобретение относится к горной промышленности и может быть использовано для управления рабочим оборудованием экскаватора-драглайна.
Цель изобретения - повышение надежности и долговечности электропривода и механизма подъема за счет снижения возникающих в них динамических нагрузок.
На чертеже представлена функциональная схема предлагаемого устройства.
Устройство содержит рабочее оборудование в виде ковша 1, подъемных 2 и тяговых 3 канатов с подъемной 4 и тяговой 5 лебедками. Подъемная лебедка 4 соединена с электродвигателем 6 привода подъема, который, управляется от управляемого преобразователя 7, вход которого подключен к второму блоку 8 выделения сигнала управления электроприводом подъема. На первый вход этого блока 8 подключен выходной сигнал регулятора 9 тока электропривода подъема, а к второму - выходы первого 10 и второго 11 управляемых ключей. Первый и второй входы регулятора 9 тока электропривода подъема соединены с выходами датчика 12 тока и регулятора 13 скорости электропривода подъема, а первый и второй входы регулятора 13 скорости подключены к выходам датчика 14 скорости и блока 15 ограничения скорости электропривода подъема. Сигнал задания для блока 15 ограничения скорости поступает на его 1 вход с выхода первого блока 16 выделения сигнала управления, первый и второй входы которого соединены с выходами регулятора 17 натяжения подъемных канатов и задатчика 18 скорости электропривода подъема. Измерение усилия в подъемных 2 и тяговых 3 канатах осуществляется датчиками 19 и 20 натяжения подъемных и тяговых канатов. Выход датчика 19 натяжения подъемных канатов подключен к второму входу блока 15 ограничения скорости и к первым входам регулятора 17 натяжения подъемных канатов и первого компаратора 21, второй вход которого соединен с выходом задатчика 22 натяжения подъемных канатов, выход которого также соединен с вторым входом регулятора 17 натяжения подъемных канатов. Датчик 20 натяжения тяговых канатов соединен с первым входом регулятора 23 натяжения тяговых канатов, второй вход которого подключен к выходу задатчика 24 натяжения тяговых канатов. Выход регулятора 23 натяжения тяговых канатов соединен с первым входом блока 25 согласования сигнала управления электроприводом подъема, к второму входу которого через блок 26 формирования зоны нечувствительности
подключен датчик 19 натяжения подъемных канатов, Выход блока 25 согласования соединен с основными входами (1) первого и второго управляемых ключей 10 и 11, управляющие входы (2) которых подключены к
выходам первого 21 и второго 27 компараторов, причем первый и второй входы второго компаратора 27 соединены с выходами задатчика 28 допустимой скорости выбора слабины канатов и датчика 14 скорости
электропривода подъема.
Устройство работает следующим образом.
Машинист управляет электроприводом подъема с помощью задатчика 18 скорости.
Поддержание заданного, усилия в подъемных канатах для устранения в них слабины осуществляется регулятором 17 натяжения подъемных канатов на основании сигналов задатчика 22 и датчика 19 натяжения подъемных канатов. При усилии в подъемных канатах большем заданного значения, устанавливаемого на выходе задатчика 22 натяжения подъемных канатов, к первому входу блока 15 ограничения скорости электропривода подъема первым блоком 16 выделения сигнала управления подключается выходной сигнал задатчика 18 скорости электропривода подъемной лебедки, а при усилии, меньшем заданного значения, - выходной
сигнал регулятора 17 натяжения подъемных канатов. Блок 15 ограничения скорости электропривода подъема обеспечивает ограничение скорости электропривода в зависимости от величины усилия в подъемных
канатах. Для этого к второму входу блока 15 ограничения скорости электропривода подъема подключается выходной сигнал датчика 19 натяжения подъемных канатов. При усилии, меньшем силы тяжести упряжи
ковша (т.е. при слабине в канатах), выходной сигнал блока 15 ограничения скорости электропривода подъема равен величине, соответствующей (0,2-0,3) Vn ном (где Vn ном - номинальная скорость электропривода подъема). При усилии, большем силы тяжести упряжи ковша, выходной сигнал блока 15 ограничения скорости соответствует номинальной скорости электропривода. Выходной сигнал блока 15 ограничения скорости электропривода подъема поступает на второй вход регулятора 13 скорости электропривода подъема, который совместно с регулятором 9 тока, датчиками скорости 14 и тока 12 электропривода подъема обеспечивает формирование экскаваторной характеристики электропривода подъема.
Выходной сигнал регулятора 9 тока электропривода подъема подключен к первому входу второго блока 8 выделения сигнала управления электроприводом подъема, к второму входу которого через первый 10 и второй 11 управляемые ключи подключен выход блока 25 согласования сигнала управления электроприводом подъема. Если усилие в подъемных канатах в процессе копания поддерживается таким, что перегрузок тягового механизма не возникает, то выходной сигнал регулятора 9 тока электропривода подъема больше,чем выходной сигнал блока 25 согласования. При этом второй блок 8 выделения сигнала управления электроприводом подъема, являющийся блоком выделения наибольшего сигнала, подключает к входу управляемого преобразователя 7 электропривода подъема сигнал с выхода регулятора 9 тока. При перегрузках привода тяги, усилие в тяговых канатах становится больше значения, установленного на выходе за датчика 24 натяжения тяговых канатов. Под действием выходного сигнала регулятора 23 натяжения тяговых канатов происходит увеличение сигнала на выходе блока 25 согласования. Этот сигнал становится больше выходного сигнала регулятора 9 тока электропривода подъема и подключается вторым блоком 8 выделения сигнала управления к входу управляемого преобразователя 7 электропривода подъема. В результате усилие в подъемных канатах увеличивается, что приводит к уменьшению срезаемой ковшом стружки грунта или обходу им труднопреодолимого препятствия. За счет этого обеспечивается устранение перегрузок привода тяги, Однако выходной сигнал блока 25 согласования поступает на вход второго блока 8 выделения сигнала управления только в том случае, если усилие в подъемных канатах больше заданного значения (т.е. слаби-. на в канатах отсутствует) и если скорость
электропривода подъема не превышает допустимой величины (например, 20-30% от Vn ном) из условия ограничения динамических нагрузок подъемного механизма. При появлении слабины в подъемных канатах выходной сигнал первого компаратора 21 становится равным нулю, так как выходной сигнал задатчика 22 натяжения подъемных канатов больше выходного сигнала датчика
0 19 натяжения подъемных канатов. Это приводит к размыканию первого управляемого ключа 11, управляющий вход которого подсоединен к выходу первого компаратора 21. Если скорость подъемного механизма при
5 выборе слабины канатов меньше заданного допустимого значения, то выход блока 25 согласования может быть подключен к входу второго блока 8 выделения сигнала управления через второй управляемый ключ.
0 Это позволяет уменьшить время устранения слабины подъемных канатов, так как выходной сигнал блока 25 согласования, направленный на увеличение натяжения подъемных канатов, подключается к входу
5 управляемого преобразователя 7, минуя инерционную систему управления электроприводом подъема с регуляторами скорости 13 и тока 9. При достижении скоростью подъемного механизма установленного
0 для выбора слабины канатов уровня, выходной сигнал датчика 14 скорости электропривода подъема становится равным выходному сигналу задатчика 28 допустимой скорости выбора слабины канатов и
5 второй управляемый ключ 11 размыкается, так как на его управляющий вход поступает с выхода второго компаратора 27 сигнал, равный нулю. Это приводит к отключению от входа второго блока 8 выделения сигнала
0 управления выходного сигнала блока 25 согласования. Дальнейший выбор слабины подъемных канатов и установление их заданного значения осуществляется за счет действия регулятора 17 натяжения подъем5 ных канатов. После установления заданного натяжения подъемных канатов на выходе компаратора 21 появляется управляющий сигнал и первый ключ 10 замыкается. Сигнал с выхода блока 25 согласования посту0 лает через первый ключ 10 и второй блок 8 выделения сигнала управления электроприводом подъемной лебедки на вход управляемого преобразователя 7. обеспечивая необходимое для устранения перегрузок тя5 гового механизма увеличение усилия в подъемных канатах. Если в результате действия выходного сигнала блока 25 согласования усилие в подъемных канатах возрастает до величины, разной (0.8 - 0,9) от Sn стоп (где Sn стог, - стопорное усилие в
подъемных канатах), то через блок 26 формирования зоны нечувствительности к второму входу блока 25 согласования происходит подключение выходного сигнала датчика 19 натяжения подъемных канатов. За счет действия сигнала обратной связи по усилию в подъемных канатах, поступающей на второй вход блока 25 согласования, обеспечивается ограничение величины натяжения подъемных канатов и снижение динамических нагрузок рабочего оборудования и механизма подъемной лебедки.
Предлагаемое устройство для управле- ния движением ковша экскаватора-драглайна по сравнению с прототипом позволяет ограничивать величину усилия в подъемных канатах при его увеличении в зависимости орг натяжения тяговых канатов, а также осуществлять увеличение этого усилия только гфи отсутствии слабины в подъемных канатах или при допустимой скорости подъемного механизма. Это обеспечивает снижение динамических нагрузок рабочего оборудования и механизма подъемной лебедки.
Таким образом использование устройства для управления движением ковша драглайна позволяет повысить надежность и долговечность электропривода и механизма подъемной лебедки за счет снижения возникающих в них динамических нагрузок. Ф о р м у л а и з о б р е т е н и я
Устройство для управления движением ковша экскаватора-драглайна, содержащее датчики натяжения подъемных и тяговых канатов, выходы которых подключены соответственно к первым входам регуляторов натяжения подъемных и тяговых канатов, к вторым входа которых соответственно подключены выходы за датчиков натяжения подъемных и тяговых канатов, выход регулятора натяжения подъемных канатов соединен с первым входом первого блока выделения сигнала управления электроприводом подъема, к второму входу которого подключен выход задатчика скорости электропривода подъема, датчик скорости привода подъема, вход которого соединен с первым входом регулятора скорости, выход
которого соединен с вторым входом регулятора тока, к первому входу которого подключен выход датчика тока, а выход регулятора тока соединен с первым входом
второго блока выделения сигнала управления, электроприводом подъема, выход которого соединен с входом управляемого преобразователя, а выход регулятора напряжения тяговых канатов соединен с первым входом блока согласования, отличающееся тем, что, с целью повышения надежности и долговечности электропривода и механизма подъема за счет снижения возникающих в них динамических нагрузок,
оно снабжено блоком формирования зоны нечувствительности, блоком ограничения скорости электропривода подъема, двумя управляемыми ключами, первым и вторым компараторами и задатчиком допустимой
скорости выбора слабины подъемных канатов, выход которого соединен с первым входом второго компаратора, с вторым входом которого соединен выход датчика скорости электропривода подъема, выход второго
компаратора соединен с управляющим входом второго управляющего ключа, выходы датчика натяжения подъемных канатов и задатчика натяжения подъемных канатов сое- диньны соответственно с первым и вторым
входами первого компаратора, выход которого соединен с управляющим входом первого ключа, выход блока согласования сигналов управления электроприводом подъема соединен с входами первого и второго ключа, выходы которых объединены и соединены с вторым входом второго блока выделения сигнала управления электроприводом подъема, выход датчика натяжения подъемных канатов соединен с вторым входом блока ограничения скорости электропривода подъема и через блок формирования зоны нечувствительности - с вторым входом блока согласования сигнала управления электроприводом подъема,
выход первого блока выделения сигнала управления электроприводом подъема соединен с первым входом блока ограничения скорости электропривода подъема, выход которого соединен с вторым входом регулятора скорости этого электропривода.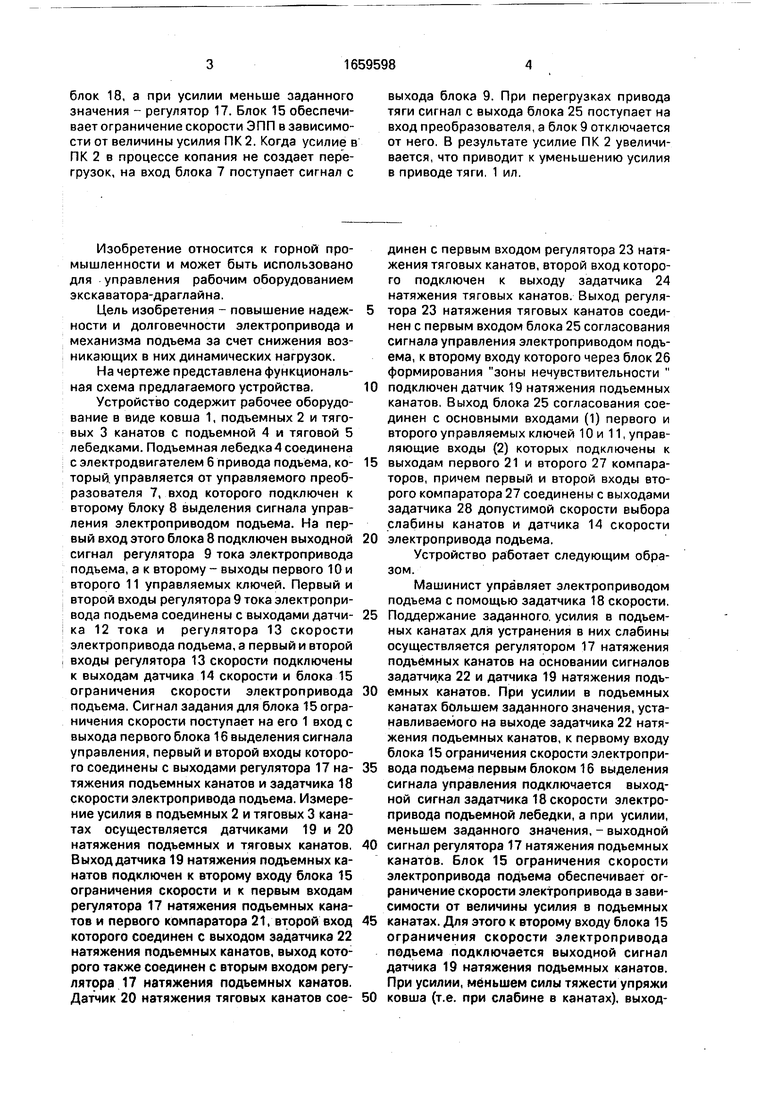
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением ковша экскаватора-драглайна | 1989 |
|
SU1659599A1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1986 |
|
SU1320352A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2005 |
|
RU2278219C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ЭКСКАВАТОРА-ДРАГЛАЙНА | 2010 |
|
RU2443829C1 |
| Устройство выбора слабины подъемных канатов экскаваторов-драглайнов | 1980 |
|
SU939674A1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1985 |
|
SU1286694A1 |
| Устройство для управления рабочим оборудованием экскаватора-драглайна | 1985 |
|
SU1313962A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ДРАГЛАЙНА ПРИ КОПАНИИ | 2006 |
|
RU2326212C1 |
| Способ управления процессом копания экскаватора-драглайна и устройство для его осуществления | 1989 |
|
SU1819949A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ЭКСКАВАТОРА-ДРАГЛАЙНА | 2011 |
|
RU2457295C1 |
Изобретение относится к горной промышленности и м.б. использовано для управления рабочим оборудованием экскаватора-драглайна. Цель - повышение надежности и долговечности электропривода и механизма подъема за счет снижения возникающих в них динамических нагрузок. Устройство содержит управляемый тири- сторный преобразователь 7, блоки 8 и 16 выделения сигнала управления электроприводом подъема (ЭПП), регулятор 9 тока электродвигателя 6 подъема, управляемые ключи 10 и 11. датчик 12 тока, регулятор 13 и датчик 14 скорости ЭПП, блок 15 ограничения скорости, регулятор 17 и задатчик 22 натяжения подъемных канатов (ПК) 2, эадат- чик 18 скорости электропривода подъема, датчики 19 и 20 натяжения ПК 2 и тяговых каналов, компараторы 21 и 27, регулятор 23 и задатчик 24 натяжения тяговых канатов 3, блок 25 согласования сигнала управления ЭПП. блок 26 формирования зоны нечувствительности и эадатчик 28 допустимой скорости выбора слабины канатов. Управление ЭПП осуществляется задатчиком 18 скорости. Поддержание требуемого значения усилия в ПК 2 осуществляется регулятором 17. При усилении ПК 2 больше заданного значения к первому входу блока 15 подключается w Ј
| Устройство для управления движением ковша-драглайна | 1979 |
|
SU897968A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1985 |
|
SU1286694A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
