Изобретение относится к электрооборудованию механизмов подъема экскаваторов-драглайнов и предназначено для ограничения динамических нагрузок, которые могут возникать при выборе слабины подъемных канатов в процессе копания или после опускания ковша на грунт.
Т звестны устройсУва 1 выбора ела-бины подъемных канатов, содержащие регулируемый электропривод постоянного тока механизма подъема, датчики усилия и производной усилия в подъемных канатах, задатчик и регулятор этого усилия и вспомогательные усилители, где выбор слабины происходит при номинальной скорости движения привода подъема, что создает значительные динамические нагрузки в упругих элементах механизма подъема и стрелы после окончания процесса выбора слабины, существенно большие, чем те, которые обычно
имеют место при ручном управлении, когда машинист заведомо снижает скорость движения привода подъема при наличии слабины подъемных канатов.
Известны также устройства выбора слабины подъемных канатов, включающие в себя регулируемый электропривод постоянного тока механизма подъема, датчик, задатчик и регулятор усилия в подъемных канатах, где выбор слабины подъемных канатов возможен при величинах скорости движения привода подъема как меньших, так и равных .номинальной 21.
В известных устройствах предусмотрено поддержание постоянного натяжения подъемных канатов после окончания выбора слабины.
Известно ycтpoйcтвoJ в котором учтена необходимость изменения натяжения подъемных канатов в процессе копания для поддержания заданной толщины стружки, что обеспечивают с помощью дополнительного нелинейного элемента, сумматора, датчиков усили и производной усилия в тяговых канатах 3.
Однако и это устройство не исключает возможности появления больших величин динамических нагрузок при выборе слабины подъемных канатов с номинальной скоростью движения привода подъема. Во всех известных устройствах не предусмотрена возможность образования слабины подъемных канатов по желанию машиниста. Для этого необходимо отключение устрой с т в
При работе перечисленных устройств возникновение слабины возможно только в процессе торможения привода подъема после соприкосновения ковша с грунтом.
В то же время при подготовительных или маневровых операциях, в про-цессе ремонта или обслуживания (например, при смазке и т.п.) в процессе копания при верхнем черпании, необходимость образования слабины подъемных канатов может возникнуть.
Избестно устройство выбора слабины подъемных канатов экскаваторовдраглайнов, содержащее управляемый преобразователь привода постоянного тока механизма подъема, регулятор напряжения привода подъема, управляемый командоаппаратом, датчики усилия в подъемных канатах и производной этого усилия, датчики скоростей приводов подъема и тяги, задатчик и регулятор усилия в подъемных канатах, ключевые элементы. В этом устройстве возмо)но образование слабины каната по усмотрению Аашиниста. Кроме того, в этом устройстве, при нулевом положении командоаппарата обеспечивают выбор больиюй слабины каната с номинальной скоростью, а по мере уменьшения слабины снижают скорость привода подъема таким образом, чтобы к моменту окончания выбора слабины скорость привода подъема была близка к нулю .
Основной недостаток известного устройства заключается в том, что оно разрешает производить весь процесс выбора слабины, вплоть до его окончания, при номинальной скорости движения привода подъема, что создает повышенные динамические нагрузки в упругих элементах
механизма подъема и стрелы,снижая таким образом надежность работы экскаватора. В устройстве не предусмотрен узел, запоминающий величину слабины подъемных канатов при наложении тормозов, а при замене или укорачивании подъемных канатов необходима перенйладка устройства.
Цель изобретения - уменьшение динамических нагрузок в упругих элементах механизма подъема и стрелы о
Поставленная цель достигается
5 тем, что устройство снабжено регулятором производной усилия в подъемных канатах, датчиком производной скорости привода подъема, шестью ключевыми элементами, резистором,
зашунтированным первым ключевым
элементом и подключенным к входу второго ключевого элемента и к выходу регулятора производной усилия в подъемных канатах, к входу которого подключены датчик усилия в подъемных канатах через датчик производной этого усилия и выход регулятора усилия, к входам которого подключены выходы командоаппарата через параллельно
включенные третий и четвертый ключевые элементы, выход задатчика усилия через пятый ключевой элемент и выход датчика усилия непосредственно причем к управляющим входам четвертого ключевого элемента подключены датчик скорости привода подъема и датчик производной скорости привода подъема, второй выход командоаппарата подключен к входу регулятора напряжения через шестой ключевой элемент, к управляющему входу которого и к управляющим входам первого, третьего и пятого ключевых элементов подключен выход датчика усилия, выход второго ключевого элемента подключен к входу регулятора напряжения , а его управляющие входы соединены с выходами датчика усилия, командоаппарата и датчика скорости привода тяги.
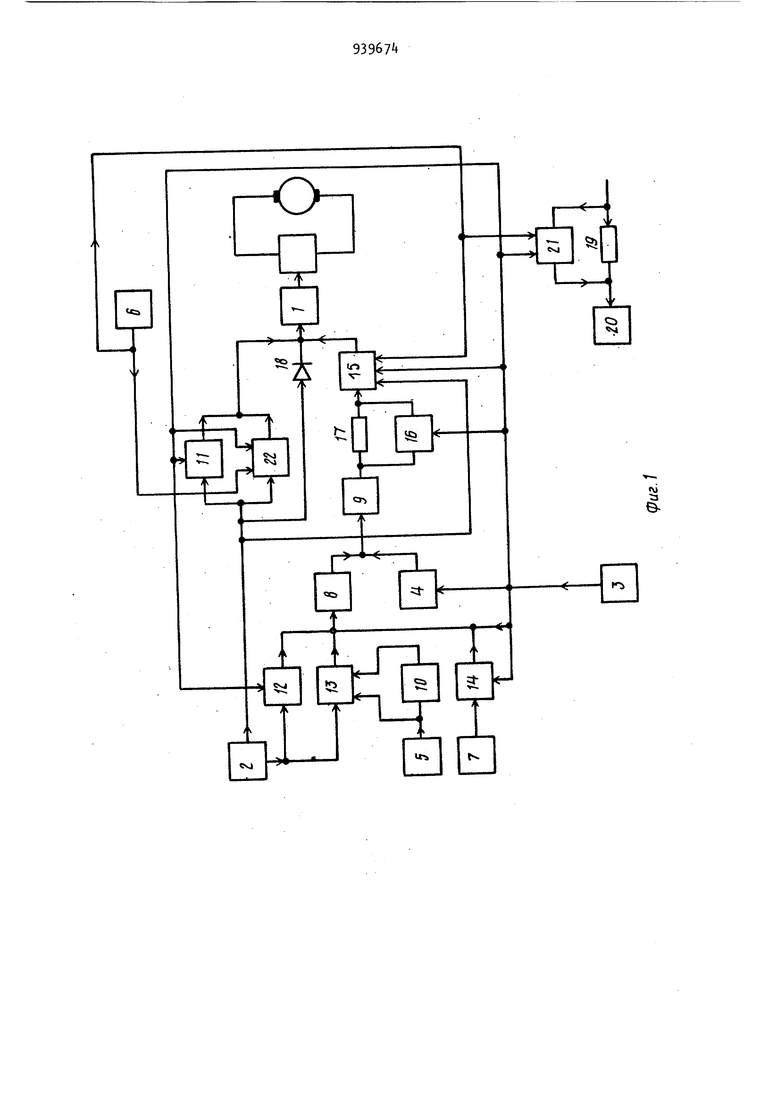
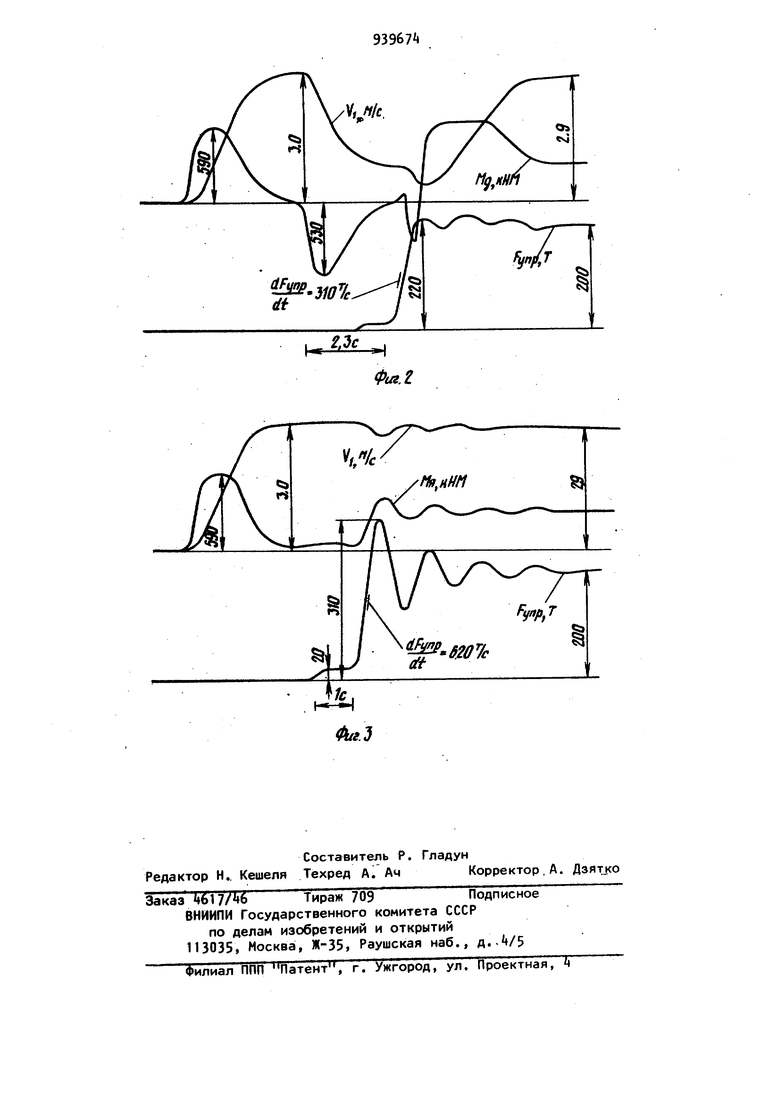
На фиг.1 показана блок-схема устройства выбора слабины подъем- . ных канатов экскаваторов-драглайнов; на фиг.2 - осциллограммы процесса 5 выбора слабины подъемных канатов, полученные на АВМ, при работе устройства; на фиг.З - осциллограммы того же процесса без устройства.
Устройство выбора слабины подъемных канатов экскаваторов-драглай нов с регулируемым электроприводом постоянного тока механизма подъема содержит регулятор 1 напряжения, управляемый командоаппаратом 2, датчики усилия 3 в подъемных кана так и 4 производной этого усилия, датчики скорости приводов подъема 5 и тяги 6, задатчик 7 и регулятор
8усилия в подъемных канатах.
Устройство снабжено регулятором
9производной усилия в подъемных канатах, датчиком 10 производной скорости привода подъема, шестью ключами 11-16 и дополнительным резистором 17 при этом выход ко-, мандоаппарата 2 соединен с входом регулятора 1 напряжения через ключ
11, управляющий вход, которого соединен с выходом датчика 3 усилия, выход командоаппарата 2 соединен также с входом регулятора усилия 8 через две параллельные цепи, каждая из которых содержит по одному ключу 12 и 13, примем управляющий вход одного из ключей 12 соединен с выходом датчика 3 усилия, а два управляющих входа другого ключа 13 соединены с выходами датчика 5 скорости привод подъема и датчика 10 производной скорости того же привода, третий вход регулятора 8 усилия соединен с выходом задатчика 7 усилия привода .подъема через ключ 1, управляющий вход которого соединен с выходом датчика 3 усилия, четвертый вход регулятора 8 усилия соединен с выходом датчика 3 усилия, выход регу-. лятора 8 усилия соединен с входом регулятора 9 производной усилия, а другой вход регулятора 9 производной усилия соединен с выходом дачика производной усилий, выход регулятора 9 усилия в свою очередь соединен с входом регулятора напржения с помощью цепи, -содержащей ключ 15 и дополнительный резистор 17, зашунтированный другим ключом 1 управляющие входы первого из этих ключей 15 соединены с выходами датчка 3 усилия, командоаппарата 2 и датчика 6 скорости привода тяги, управляющий вход другого ключа 16, шунтирующего дополнительный резистор 17, соединен только с выходом датчика 3 усилия.
Кроме перечисленных элементов, в устройство введены вспомогательные элементы, которые обеспечивают сопряжение устройства с системой управления электроприводом механизма подъема. К этим элементам относятся диоды 18, вспомогательный резистор 19, включенный на выход регулятора 20 напряжения, и вспомогательные ключи 21 и 22.
Диод 20 включен последовательно в цепи, соединяющие выход командоаппарата 2 с входом регулятора 1 напряжения. Параллельно вспомогательному резистору 19, включенному на выход регулятора 20 напряжения привода тяги, подсоединен ключ 21, управляющий вход которого соединен с выходом датчика 6 скорости привода тяги. Управляющий .вход ключа 22, подсоединенного параллельно ключу 11, соединен с выходом датчика 6 скорости. Выход регулятора напряжения подключен ко входу управляемого преобразователя 23 двигателя привода подъема 2.
Устройство работает следующим образом.
При наличии слабины подъемных канатов и задании от командоаппарата 2 сигнала Вверх выбор слабины происходит с любой, заданной оператором, скоростью вплоть до минимальной, что обеспечивается с помощью цепи, содержащей ключ 11 и соединяющей командоаппарат 2 с регулятором 1 напряжения. Ключ 11, разрешающий прохождение сигнала от командоаппарата 2 к регулятору 1, открыт до тех пор, пока не происходит взвешивание упряжи ковша, а усилие в подъемных канатах не достигает величины, равной 3% от стопорного значения. Ключ 11 закрывают, разрывая цепь задания скорости Вверх от командоаппарата 2, как только происходит взвешивание упряжи и величина усилия в подъемных канатах превысит 3% стопорного значения. Одновременно . с закрытием ключа 11 открывают ключ 1, разрешая прохождение сигнала задания от задатчика 7 на вход peryi лятора 8 усилия. При этом сигнал задания от командоаппарата 2 на вход регулятора 8 усилия еще не проходит так как закрыт ключ 12, который открывают, когда величина усилия в подъемных канатах превысит 5 стопорного значения.
Таким образом, после взвешивания упряжи выбор слабины подъемных ка7натов происходит автоматически с по щью сигнала задания, поступающего с выхода задатчика 7 на вход регуля тора 1 напряжения, через цепь, соде жащую ключи и 15, регуляторы 8 усилия и 9 производной усилия и дополнительный резистор 17. Ключ 15 открывают в процессе копания после взвешивания упряжи, когда происходит движение привода тяги на себя или скорость тяги от себя не превышает 20-30 номинальной, командоаппарат 2 находится в положении на себя или в нейтральном положении, а усилие в подъемных канатах превышает 3 стопорного значения, для че управляющие входы ключа 15 соединен с выходами датчика 6 скорости тлги. командоаппарата 2 и датчика 3 усилия. При столь малых величинах усил (.примерно 3% от стопорного значения и малых величинах сигналов отрицате ной связи по усилию, поступающему н вход регулятора 8 с выхода датчика регуляторы 8 и, соответственно, 9 выдают максимальные значения своих выходных сигналов. Однако максимальная величина выходного сигнала регулятора 9 ограничена резистором 17 при закрытом ключе 16. Ключ 16 закрыт, пока не натянута упряжь не достигло 5% стопорного значения. С помощью установки соответствую щей величины сопротивления резистор 17 на вход регулятора 1 с выхода регулятора 9 после взвешивания упря жи ковша подают уменьшенную величину задания скорости привода подъема равную 20-50 номинального значения При наличии слабины иустановке командоаппарата 2 в нейтральное положение, если упряжь не поднята, выбора слабины не происходит, что обеспечивают с помощью ключа 1, который закрыт, пока упряжь не взве шена и величина усилия в подъемных канатах не достигла 3 стопорного значения. Если упряжь приподнята, а командоаппарат установлен в нейтральное положение, происходит выбор слабины также с пониженной скорость и натяжение подъёмных канатов до усилия, равного примерно 5 стопорного значения, что определяется величиной сигнала, поступающего с задатчика 7 на вход регулятора 8 усилия через ключ 1. Таким образом, можно выделить два этапа работы устройства выбора слабины подъемных канатов. При наличии большой слабины канатов до взвешивания упряжи ковша выбор слабины происходит с любой заданной оператором скоростью, а после взвешивания упряжи - автоматически с пониженной скоростью, равной 2050 от номинального значения. После того, как выбор слабины подъемных канатов закончен,упряжь ковша натянута, а усилие в подъемных канатах достигает 5% стопорного значения, разрешают увеличение максимальной величины выходного сигнала регулятора 9, являющегося заданием скорости Вверх до номинального значения. При величине усилия в подъ мных канатах, равной 5 стопорного значения, открывают ключ 16, закорачивая резистор 17 и увеличивая максимальное значение выходного сигнала регулятора 9. Однако, если процесс копания продолжают и ключ 15 открыт, то после выбора слабины устройство позволяет регулировать натяжение подъемных канатов в широких пределах вплоть до стопорного .значения. Для этого выход командоаппарата 2 соединяют с замкнутым контуром регулирования усилил в подъемных канатах через ключ 12, подключенный на вход регулятора 8 усилия. Ключ 12 открывают, когда усилие в подъемных канатах превысит 5% стопорного значения. Отрицательную обратную связь по усилию с подъемных канатах осуществляют, подавая выходной сигнал датчика 3 усилия на вход регулятора 8 усилия. Когда необходимость регулирования усилия в подъемных канатах отсутствует и командоаппарат 2 устанавливают в нейтральное положение, величину усилия задают постоянной и равной примерно 5 от стопорного значения с помощью задатчика 7, соединенного со входом «регулятора 8 через ключ . Управляющие входы всех ключей срабатывают от величины усилия в подъемных канатах и подключены на выход датчика 3, что существенно повышает точность измерения величин усилия в подъемных канатах и уставок срабатывания ключей. В устройство введена цепь, обеспечивающая преодоление момента трения покоя, величина которого может п-стигать 10/) от стопорного значения момента. Эта цепь соединяет выход командоаппарата 2 со входом регуля тора 8 усилия через ключ 13. Ключ 13 открывают, когда скорость и уско рение двигателя равны нулю, для чего управляющие входы ключа 13 соединен с выходами датчика 5 скорости и дат чика 10 производной скорости. Ключ 13 закрывают, когда скорость или ус корение двигателя отличны от нуля. Уменьшение рывка.и снижение дина мических нагрузок в упругих элементах механизма подъема и стрелы в процессе выбора слабины подъемных канатов устраняется наличием отдель ного контура регулирования производ ной усилия в подъемных канатах, под чиненного контуру регулирования уси лия. Контур регулирования производной усилия состоит из регулятора 9 производной усилия, соединенного с выходом регулятора 8 усилия. Отрица тельную обратную связь по производной усилия в подъемных канатах осуществляют, подавая выходной сигнал датчика производной усилия на вход регулятора 9. В устройстве также предусмотрен специальный вспомогательный узел, который уменьшает скорость привода тяги в процессе копания при выборе слабины подъемных канатов, когда скорость привода подъема снижена, Если такое снижение скорости привод тяги не производить, то в глубоких забоях с нижним черпанием, когда движение привода тяги происходит со скоростью, близкой к номинальной, слабина подъемных канатов не успевает выбираться. Указанный узел состоит из резистора 19, зашунтированного ключом 21 и включенного на выход регулятора 20напряжения привода тяги. Ключ 21закрывают, когда усилие в додъем ных канатах становится меньше S стопорного значения и величина скорости привода подъема становится равной величине уставки пониженной скорости Вверх ( номинального значения), определяемой величи ной максимального выходного сигнала регулятора 9 при закрытом ключе 16, что свидетельствует о режиме выбора слабины подъемных канатов. Ключ 21 открывают и разрешают движение прив да тяги с номинальной скоростью, когда упряжь ковша натянута и усили в подъемных канатах превышает 5 стопорного значения или скорость привода подъема меньше величины уставки пониженной скорости Вверх. После окончания процесса копания разрывают цепь регулирования натяжения подъемных канатов, закрывая ключ 15, и замыкают цепь регулирования скорости привода подъема, открывая ключ 22. Ключ 15 закрывают, а ключ 22 открывают, когда скорость движения привода тяги от себя достигает 20-30 номинального значения, что свидетельствует о начале выноса ковша. Еще одним условием открытия ключа 22 является наличие усилия в подъемных канатах, не меньшего веса пустого ковша, что составляет примерно 15 от стопорного значения, Величина уставки скорости механизма тяги от себя при котором закрывают ключ 15.и открывают ключ 22, определяется необходимостью работы контура регулирования натяжения подъемных канатов при особом режиме работы с верхним черпанием, когда машинист вынужден отталкивать с помощью задней стенки ковша большое количество грунта из передней части забоя, перемещенного в предыдущих циклах копания в так называемой призме волочения, перед ковшом. В этом .режиме ковш движется, касаясь грунта, в направлении от себя за счет натяжения подъемных канатов, разматывая одновременно тяговые канаты. Скорость механизма тяги при этом может достигать 20-30, номинальной величины. Устройство разрешает образование слабины подъемных канатов и движение в направлении спуска ковша с любо11 заданной оператором скоростью с помощью цепи, которая соединяет командоаппарат 2 с регулятором 1 напряжения через диод 18. Таким образом, устройство обеспечивает существенное снижение динамических нагрузок при выборе слабины подъемных канатов в процессе копания или после опускания ковша на грунт с помощью задания существенно поних енного значения скорости привода подъема, как только происходит взвешивание упрлжи ковша. Из сопоставления приоеденных нл фиг.2 и 3 осциллограмм видно, что при менение устройства снижает максимопьную величину динамического усипип в упругих элементах (канатах) механизма в процессе выбора слаб ны подъемных канатов в 1 .t раза. При этом величина производной усилий в упругих элементах механизма подъем уменьшается примерно вдвое, что способствует снижению динамических нагр зок в упругих элементах стрелы и над стройки. Уменьшение величин динамических нагрузок в упругих элементах механизма подъема и стрелы обеспечивает уменьшение износа механизма подъема и конструкции стрелы, увеличивает до говечность и межремонтный срок их службы и, таким образом, производительность экскаватора на 2%. Формула изобретения Устройство выбора слабины подъемных канатов экскаваторов-драглайнов, содержащее управляемый преобразователь привода подъема, командеаппарат, регулятор напряжения привод подъема, датчики усилия в подъемных канатах и производной этого усилия, скоростей приводов подъема и тяги, задатчик и регулятор усилия в подъемных канатах, ключевые элементы, отличающееся тем, что, с целью уменьшения динамических на1- рузок в упругих элементах механизма подъема и стрелы, оно снабжено регулятором производной усилия в подъемных канатах, датчиком производной скорости привода подъема, шестью ключевыми элементами и резистором, зашунтированным первым ключевым элементом и подключенным к входу второго ключевогб элемента и к выходу регулятора производной усилил в подъемных канатах, к входу которого подключены датчик усилия в подъемных канатах через датчик производной этого усилия и выход регулятора усилия, к входам которого подключены выходы командоаппарата через параллельно включенные третий и четвертый ключевые элементы, выход задатчика усилия через пятый ключевой элемент и выход датчика усилия непосредственно, причем к управляющим входам четвертого ключевого элемента подключены датчик скорости привода подъема и датчик производной скорости привода подъема, второй выход командоаппарата подключен к входу регулятора напряжения через шестой ключевой элемент к упраляющему входу которого и к управляющим входам первого, третьего и пятого ключевых элементов подключен выход датчика усилия, выход второго ключевого элемента подключен к входу регулятора напряжения, а его управляющие входы соединены с выходами датчика усилия, командоаппарата и датчика скорости привода тяги. Источники информации, принятые во внимание npi экспертизе 1.Авторское свидетельство СССР № 599023, кл. Е 02F 9/20, 1975. 2.Авторское свидетельство СССР К 67669, «л. Е 02Р , 1978. 3.Авторское свидетельство СССР № 6it2 i 0, кл. Е 02 F 3/48, 1977. k. Авторское свидетельство СССР W 639999, кл. Е 02 F , 1977 (.прототип).
|-г .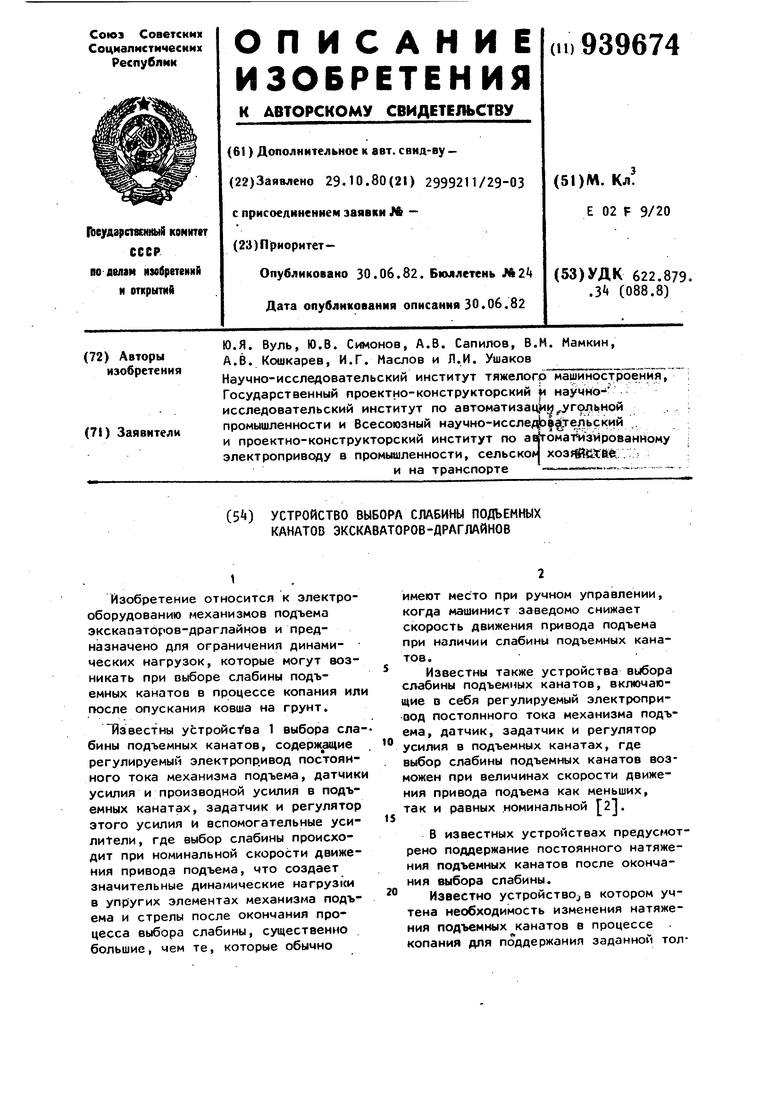
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессом копания экскаватора-драглайна и устройство для его осуществления | 1989 |
|
SU1819949A1 |
| Способ автоматического управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1981 |
|
SU977623A1 |
| Способ управления процессом черпания экскаватора-драглайна и устройство для его осуществления | 1980 |
|
SU910957A1 |
| Способ управления движением ковша драглайна и устройство для его осуществления | 1982 |
|
SU1084390A1 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1990 |
|
SU1768720A1 |
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1629423A1 |
| Способ управления драглайном и устройство для его осуществления | 1986 |
|
SU1421836A1 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1986 |
|
SU1320350A2 |
| Устройство для управления движением ковша экскаватора-драглайна | 1989 |
|
SU1659598A1 |
| Устройство для управления рабочим оборудованием экскаватора-драглайна | 1985 |
|
SU1313962A2 |