Изобретение относится к горной промышленности и может найти применение при управлении процессом копания экскаватора-драглайна.
Целью изобретения является повышение производительности при снижении динамических нагрузок на рабочее оборудование.
Для реализации указанного способа в известное устройство для управления процессом копания экскаватора-драглайна, содержащее блоки управления электроприводами тягового механизма и механизма подъема, датчики натяжения тягового и подъемного канатов, датчики длины тягового и подъемного канатов, выходы которых подключены к входам блока определения косинуса угла между канатами, блок умножения и сумматор, введены блок определения условий работы, регулятор натяжения тягового каната, задатчик натяжения тягового каната, командоаппарат тяги и допол
нительные сумматор и блок умножения, выход которого подключен к первому входу сумматора, к второму входу которого подключен выход блока умножения, выход сум- матора подключен к входу блока управления приводом подъемного механизма, датчик натяжения подъемного каната подключен к первому входу блока определения условий работы, к второму входу которого подключен выход датчика длины подъемного каната, к третьему - датчик натяжения тягового каната, причем выход блока определения условий работы подключен к первому входу дополнительного блока умножения, к второму входу которого подключен регулятор натяжения тягового каната, а выход датчика натяжения тягового каната подключен к первому входу дополнительного сумматора, к второму входу которого под- ключен задатчик натяжения тягового каната, выход дополнительного сумматора подключен к входу регулятора натяжения тягового каната, а командоаппарат тяги подключен к входу блока управления приводами тяги и первому входу блока умножения, к второму входу которого подключен выход блока определения косинуса угла между канатами.
Соответствие данного технического решения критерию Существенные отличия доказывается тем, что известные технические решения не позволяют создать высокопроизводительного экскаватора-драглайна из-за того, что отсутствует связь между нагрузкой на привод тяги и натяжением подъ- емного каната; так как натяжение подъемного каната определяет интенсивность заглубления ковша в забой, то в легких забоях управление согласно указанному способу может привести к стопорению привода тяги°при быстром увеличении толщины стружки. В тяжелых забоях управление процессом черпания ухудшает заглубление ков-: ша, что приводит к снижению производительности экскаватора; при выборе слабины подъемного каната не учитываются величина и значение проекции скорости тяга на подъемный канат, веледст- вне чего ограничение скорости подъема при большой слабине вызывает значительное увеличение длительности ее выбора. Отсутствие учета проекции скорости тяги на подъемный канат приводит к существенному возрастанию динамических нагрузок на стреловую конструкцию при одних положениях ковша или к увеличению длительности выбора слабины при других положениях; формирование скорости привода подъема производится без учета конкретных горно- технологических условий работы экскаватора, что приводит к недоиспользованию технических возможностей привода тяги в легких забоях, а в тяжелых забоях возможны значительные динамические нагрузки на рабочее оборудование и тяговый механизм драглайна.
Предлагаемое техническое решение позволяет автоматически перестраивать процесс регулирования натяжения тяговых
0 канатов в соответствии с изменением гор- но-технологических условий при выполнении операции копания, что дает возможность повысить производительность экскаватора-драглайна и снизить динамиче5 ские нагрузки на рабочее оборудование и механизм тяги драглайна.
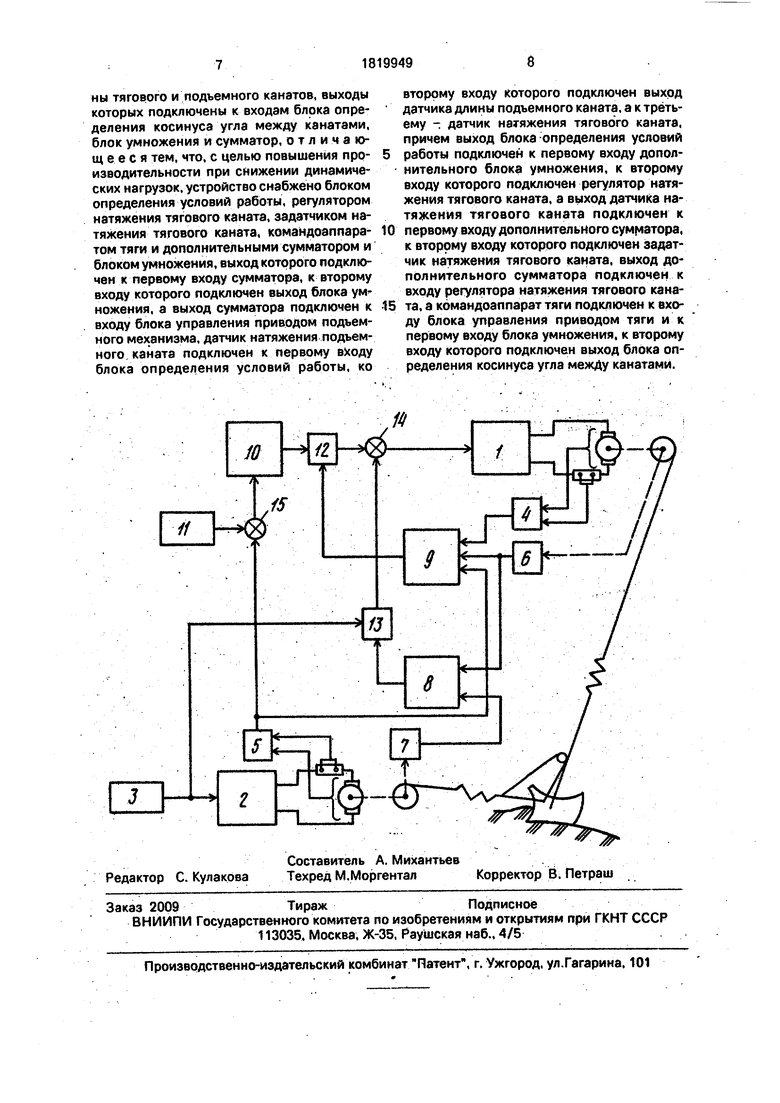
На чертеже показано устройство, реализующее способ.
Оно содержит блок управления 1 элект0 роприводом механизма подъема, блок управления 2 электроприводом тягового механизма, командоаппарат тяги 3, датчик 4 натяжения подъемного каната, датчик 5 натяжения тягового каната, датчик 6 длины
5 подъемного и датчик 7 длины тягового кана- . тов, блок 8 определения косинуса угла между канатами, блок 9 определения условий работы, регулятор 10 натяжения тягового каната, задатчик 11 натяжения тягового ка0 ната, первый 12 и дополнительный 13 блоки умножения, первый 14 и дополнительный 15 сумматоры.
Выход командоаппарата тяги 3 подключен к входу блока управления 2 электронри-.
5 водом тягового механизма и первому входу дополнительного блока умножения 13, второй вход которого соединен с выходом бло- ка 8, первый вход блока 8 подключен к выходу датчика 6, а второй вход - к выходу
0 датчика 7, первый вход блока 9 подключен к выходу датчика 4, второй вход - к выходу датчика 6, третий вход связан с выходом датчика 5, выход блока 9 соединен с первым входом блока 12, второй вход которого под5 ключей к выходу регулятора 10, вход последнего соединен с выходом дополнительного сумматора 15, первый вход которого соединен с задатчиком 11, а второй - с датчиком 5, причем выход блока 12 подключен к пер0 вому входу сумматора 14, второй вход которого соединен с выходом блока 13, а выход - с входом блока управления 1 электроприводом механизма подъема.
Сущность предлагаемого способа за5 ключается в том, что осуществляется автоматическая перестройка процесса регулирования натяжения тяговых канатов в соответствии с изменением горно-техно- логических условий при выполнении операции копания.
Устройство, реализующее предлагаемый способ, функционирует следующим образом. .
Автоматическое управление копанием осуществляется путем регулирования ско- рости механизма подъема в функции изменения усилия в тяговых канатах. Для этого в процессе копания датчиком 5 измеряют текущее значение усилия в тяговом канате и сумматором 15 вычисляют рассогласование между заданной величиной усилия в тяговом канате и его текущим значением. В функции рассогласования регулятор 10 формирует сигнал управления электроприводом механизма подъема. Этот сигнал в блоке 12 умножается на корректирующий коэффициент, отражающий текущее состояние горно-технологических условий работы экскаватора. Значение коэффициента определяется в блоке 9 на основании информа- ции, поступающей от датчиков 4-6. Блоком 9 решается следующее уравнение
.. Sn Ln
FFSr
где Кк - корректирующее воздействие;
Sn - усилие в подъёмном канате;
ST - усилие в тяговом канате;
Ln - длина подъемного каната;
Е - модуль Юнга;
F - площадь поперечного сечения ка- ната.
Блок 9 определения условий работы, как следует из приведенного выражения, выполняет функции умножения двух величин и деления полученного произведения на третью величину, а также умножения результата на постоянный коэффициент. Этот блок может быть реализован с использованием серийно изготавливаемых схем умножения и деления.
Влияние сигнала задания по скорости тягового механизма на процесс формирования сигнала управления приводом подъема учитывается путем суммирования в блоке 14 выходного сигнала блока умножения 12 и сигнала командоаппарата тяги 3, умноженного в блоке 13 на выходной сигнал блока 8 определения косинуса угла между подъемным и тяговым канатами, который обеспечивает решение уравнения
cos F
L2-aL
2 Ln LT где L - длина стрелы драглайна;
U - длина тягового каната.
Выходной сигнал сумматора 14 поступает на вход блока управления 1 электроприводом подъема и обеспечивает такое изменение этой скорости, при котором уси510 15 0
5
0
5 0
5 0
5
лие в тяговом канате стабилизируется на заданном уровне.
После заполнения ковша (оценивается машинистом визуально) машинист переводит командоаппараты ручного управления скоростью подъемной и тяговой лебедок в нужное для транспортировки ковша положение и отключает устройство.
Таким образом, предлагаемое устройство позволяет автоматически перестраивать процесс регулирования натяжения тяговых канатов в соответствии с изменением горно-технологических условий при выполнении операции копания.
Формула изобретения
1. Способ управления процессом копания экскаватора-драглайна, заключающийся в том, что формируют сигнал,- пропорциональный усилиям в подъемном и тяговом канатах, сигналы, пропорциональные длине этих канатов, затем суммируют сигнал, пропорциональный косинусу угла между подъемным тяговым канатами, отличающийся тем, что, с целью повышения производительности при снижении динамических нагрузок на рабочее оборудование, задают скорость тягового механизма и усилия в тяговом канате, затем формируют сигнал рассогласования между заданным значением усилия в тяговом канате и его текущим значением, после чего в функции сигнала рассогласования формируют сигнал, пропорциональный заданию по скорости изменения усилия в тяговом механизме, при этом сигнал задания по скорости подъемного механизма определяют по следующей зависимости:
ST -UTKCOSF,
где In3 - задание по скорости привода подъема
8т3 - задание по скорости изменения усилия в тяговом канате;
Sn - усилие в подъемном канате;
ST - усилие в тяговом канате;
длина подъемного каната;
UTK напряжение, пропорциональное заданию по скорости тягового механизма;
cos F - косинус угла между подъемным и тяговым канатами;
Е - модуль Юнга;
F - площадь поперечного сечения каната.
2. Устройство для управления процессом копания экскаватора-драглайна, содержащееблоки управления электроприводами тягового механизма и механизма подъема, датчики натяжения тягового и подъемного канатов, датчики длины тягового и подъемного канатов, выходы которых подключены к входам блока определения косинуса угла между канатами, блок умножения и сумматор, отличающееся тем, что, с целью повышения производительности при снижении динамических нагрузок, устройство снабжено блоком определения условий работы, регулятором натяжения тягового каната, задатчиком натяжения тягового каната, командоаппаратом тяги и дополнительными сумматором и блоком умножения, выход которого подключен к первому входу сумматора, к второму входу которого подключен выход блока умножения, а выход сумматора подключен к входу блока управления приводом подъемного механизма, датчик натяжения подъемного каната подключен к первому входу блока определения условий работы, ко
второму входу которого подключен выход
датчика длины подъемного каната, а к третьему - датчик натяжения тягового каната, причем выход блока -определения условий
работы подключен к первому входу дополнительного блока умножения, к второму входу которого подключен регулятор натяжения тягового каната, а выход датчика натяжения тягового каната подключен к
первому входу дополнительного сумматора, к второму входу которого подключен задат- чик натяжения тягового каната, выход дополнительного сумматора подключен к входу регулятора натяжения тягового каната, а командоаппарат тяги подключен к входу блока управления приводом тяги и к первому входу блока умножения, к второму входу которого подключен выход блока определения косинуса угла между канатами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления процессом копания экскаватора-дреглайна | 1984 |
|
SU1182127A2 |
| Способ управления процессом черпания экскаватора-драглайна и устройство для его осуществления | 1980 |
|
SU910957A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ДРАГЛАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2130998C1 |
| Способ управления движением ковша драглайна при копании и устройство для его осуществления | 1986 |
|
SU1333745A1 |
| Устройство выбора слабины подъемных канатов экскаваторов-драглайнов | 1980 |
|
SU939674A1 |
| Способ управления движением ковша драглайна и устройство для его осуществления | 1982 |
|
SU1084390A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ДРАГЛАЙНА ПРИ КОПАНИИ | 2006 |
|
RU2326212C1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1989 |
|
SU1659599A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2006 |
|
RU2332542C1 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1990 |
|
SU1768720A1 |
Сущность: способ включает формирование сигнала, пропорционального усилиям в подъемном и тяговом каналах, сигналов, пропорциональных длине этих канатов, и сигнала, пропорционального косинусу угла между подъемным и тяговым канатами, задание скорости тягового механизма и усилия в тяговом канате, формирование сигнала рассогласования между заданным значением усилия в тяговом канате и его текущим значением, формирование в функции сигнала рассогласования сигнал, пропорциональный заданию по скорости изменения усилия в тяговом механизме. Сигнал задания по скорости подъемного механизма определяют по формуле п3 Sn Ln ST3- UT.K cos F, где In3 -г задание по скорости привода подъема; 5т - задание по скорости изменения усилия в тяговом канате; Sn - усилие в подъемном канате; ST - усилие в тяговом канате; Ln -длина подъемного каната; UT.K- напряжение, пропорциональное заданию по скорости тягового механизма; Е - модуль Юнга; F - площадь поперечного сечения каната. 1 ил. (Л С со Ю 4 Ю
| Ломакин М.С | |||
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| - Изв | |||
| ВУЗов | |||
| Горный журнал, 1963, Nfe 10 | |||
| Ткаченко В.Я | |||
| и Ломакин В.П | |||
| Динамические усилия в канатах экскаватора-драглайна при совместной работе электромеханических Систем подъема и тяги | |||
| - Изв | |||
| ВУЗов, Горный журнал 1967, №11 | |||
| Ломакин М.С | |||
| Динамические нагрузки рабочего оборудования мощных драглайнов | |||
| - Автореферат докторской диссертации | |||
| М.: МГИ, 1987. | |||
