Фиг.1
рощение сборки модуля и его настройки. Модуль состоит из корпуса 1 с выходным звеном 2 и фиксаторами его крайних положений. Привод перемещения звена 2 содержит двигатель 5 подкачки и две спиральные пружины 6 и 7 с противоположным направлением навивки, каждая из которых одним концом закреплена на подвижном звене 2, а другим - на соответствующем кольце 8 или 9. Кольца 8 и 9 установлены в пазах корпуса
1 соосно подвижному звену 2 с возможностью поворота вокруг его оси для обеспечения подзавода пружин 6 и 7. Такой подзавод осуществляется с помощью упоров 13, для чего в корпусе выполнены окна, а в кольцах выполнены резьбовые отверстия, или с помощью самотормозящего червяка, взаимодействующего с зубьями, выполненными на соответствующем кольце. 5 з.п. ф-лы, 5 ил.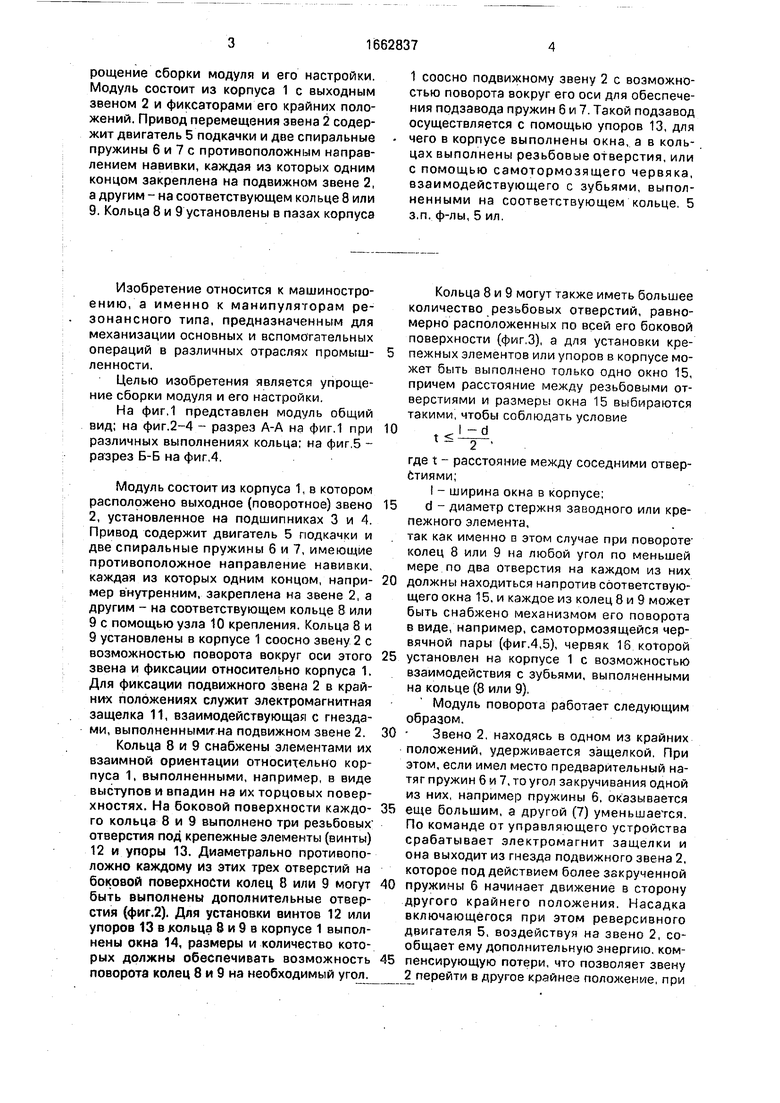
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль резонансного манипулятора | 1988 |
|
SU1662839A1 |
| Модуль вертикального перемещения | 1986 |
|
SU1386444A1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1576304A1 |
| Модуль резонансного манипулятора | 1989 |
|
SU1712140A1 |
| Устройство для выставки преимущественно акселерометров | 1982 |
|
SU1064206A1 |
| Автоматический выключатель | 1987 |
|
SU1495873A1 |
| Модуль резонансного манипулятора | 1989 |
|
SU1710335A1 |
| Устройство для выталкивания червяка из червячного пресса | 1976 |
|
SU647132A1 |
| Устройство для юстировки приборов | 1988 |
|
SU1783504A1 |
| Крепежное устройство | 1979 |
|
SU846812A1 |
Изобретение относится к машиностроению, а именно к манипуляторам резонансного типа, предназначенным для механизации основных и вспомогательных операций в различных отраслях промышленности. Целью изобретения является упрощение сборки модуля и его настройки. Модуль состоит из корпуса 1 с выходным звеном 2 и фиксаторами его крайних положений. Привод перемещения звена 2 содержит двигатель 5 подкачки и две спиральные пружины 6 и 7 с противоположным направлением навивки, каждая из которых одним концом закреплена на подвижном звене 2, а другим - на соответствующем кольце 8 или 9. Кольца 8 и 9 установлены в пазах корпуса 1 соосно подвижному звену 2 с возможностью поворота вокруг его оси для обеспечения подзавода пружин 6 и 7. Такой подзавод осуществляется с помощью упоров 13, для чего в корпусе выполнены окна, а в кольцах выполнены резьбовые отверстия, или с помощью самотормозящего червяка, взаимодействующего с зубьями, выполненными на соответствующем кольце. 5 з.п.ф-лы, 5 ил.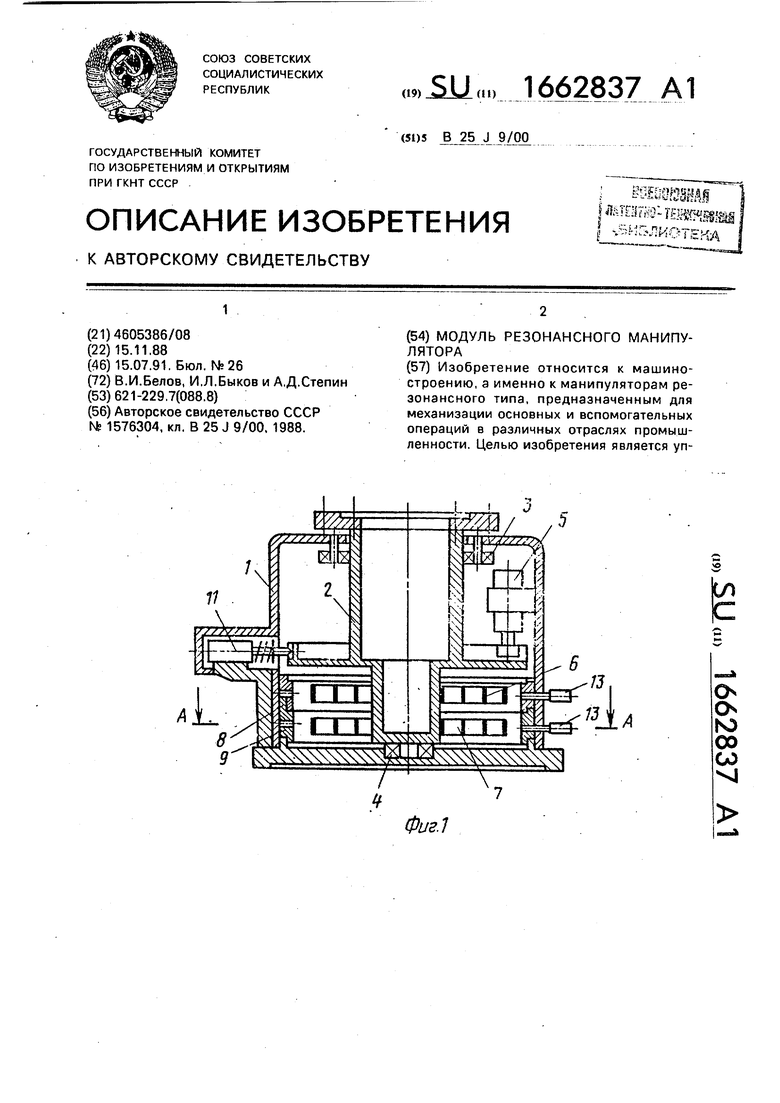
Изобретение относится к машиностроению, а именно к манипуляторам резонансного типа, предназначенным для механизации основных и вспомогательных операций в различных отраслях промышленности.
Целью изобретения является упрощение сборки модуля и его настройки.
На фиг.1 представлен модуль общий вид; на фиг.2-4 - разрез А-А на фиг.1 при различных выполнениях кольца; на фиг.5 - разрез Б-Б на фиг.4.
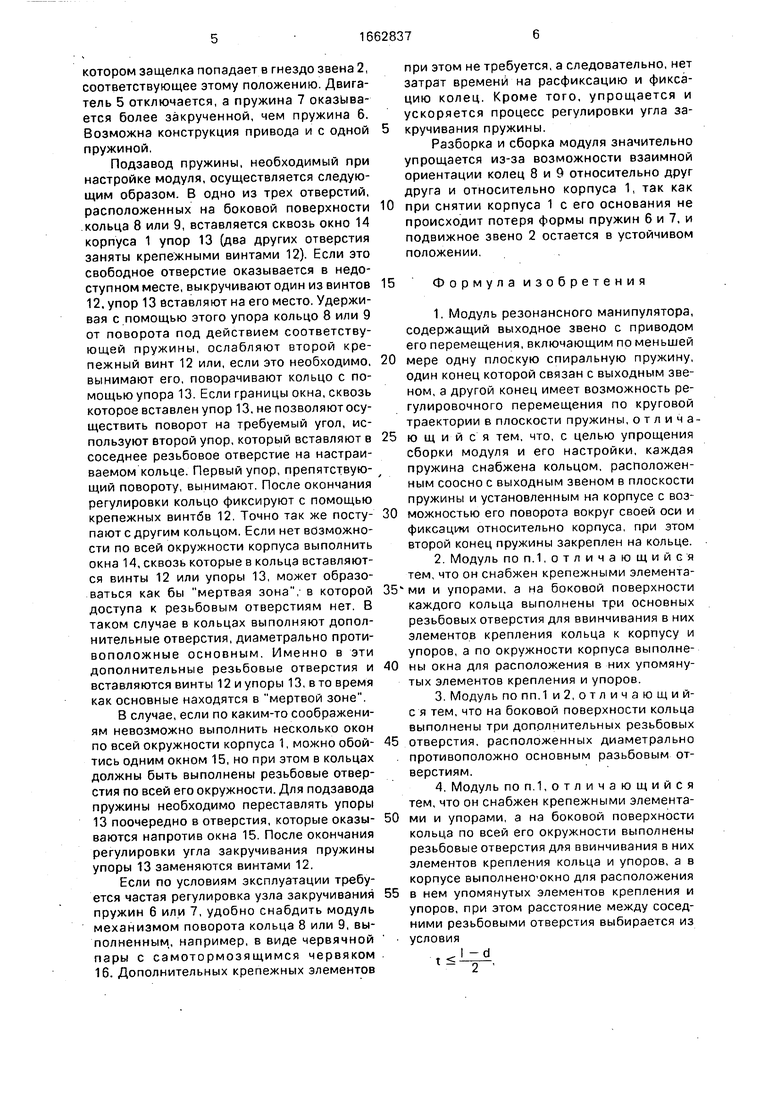
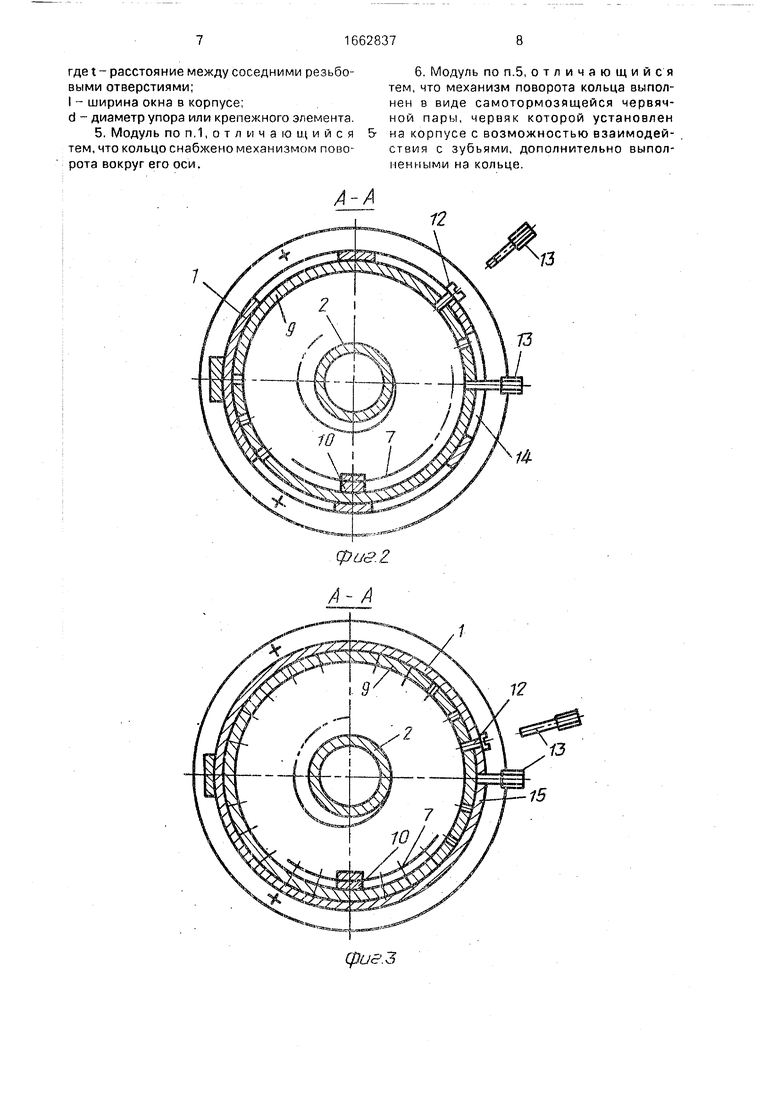
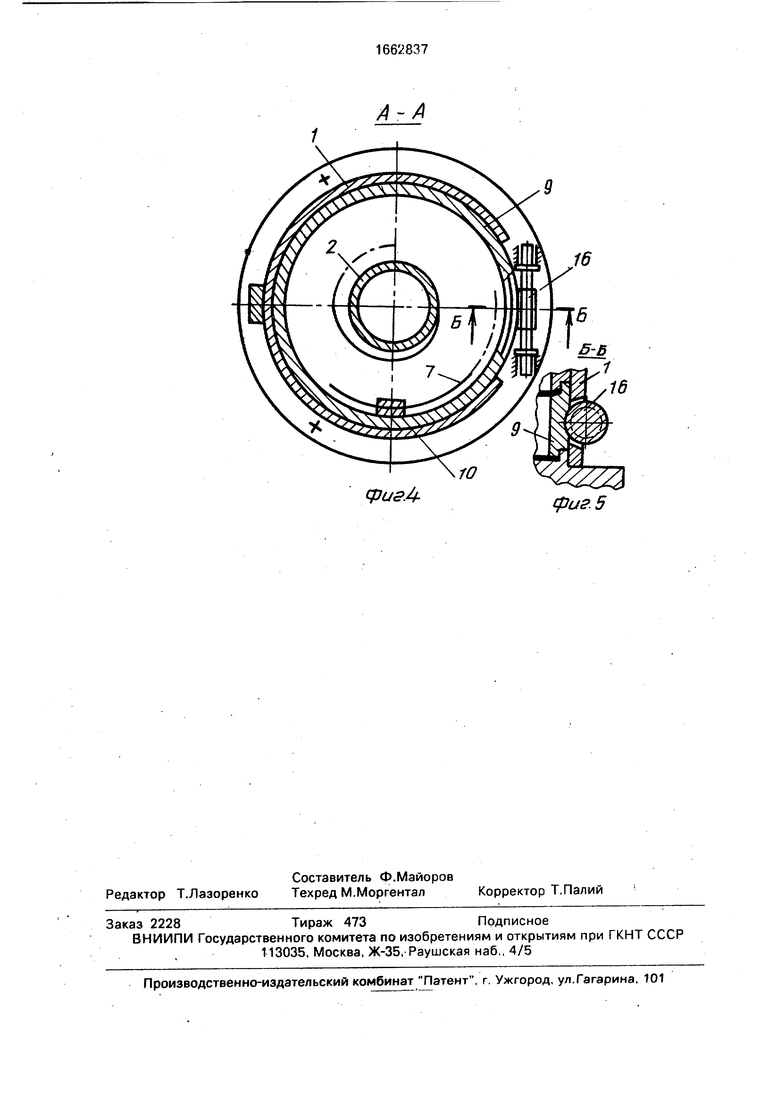
Модуль состоит из корпуса 1, в котором расположено выходное (поворотное) звено 2, установленное на подшипниках 3 и 4. Привод содержит двигатель 5 подкачки и две спиральные пружины 6 и 7, имеющие противоположное направление навивки, каждая из которых одним концом, например внутренним, закреплена на звене 2, а другим - на соответствующем кольце & или 9 с помощью узла 10 крепления. Кольца 8 и 9 установлены в корпусе 1 соосно звену 2 с возможностью поворота вокруг оси этого звена и фиксации относительно корпуса 1, Для фиксации подвижного звена 2 в крайних положениях служит электромагнитная защелка 11, взаимодействующая с гнездами, выполненными-на подвижном звене 2.
Кольца 8 и 9 снабжены элементами их взаимной ориентации относительно корпуса 1, выполненными, например, в виде выступов и впадин на их торцовых поверхностях. На боковой поверхности каждого кольца 8 и 9 выполнено три резьбовых1 отверстия под крепежные элементы (винты) 12 и упоры 13. Диаметрально противоположно каждому из этих трех отверстий на боковой поверхности колец 8 или 9 могут быть выполнены дополнительные отверстия (фиг.2). Для установки винтов 12 или упоров 13 в кольца 8 и 9 в корпусе 1 выполнены окна 14, размеры и количество которых должны обеспечивать возможность поворота колец 8 и 9 на необходимый угол
Кольца 8 и 9 могут также иметь большее количество резьбовых отверстий, равномерно расположенных по всей его боковой поверхности (фиг.З), а для установки кре- пежных элементов или упоров в корпусе может быть выполнено только одно окно 15, причем расстояние между резьбовыми отверстиями и размеры окна 15 выбираются такими, чтобы соблюдать условие
10
t
-d
где х - расстояние между соседними отверстиями;
I - ширина окна в корпусе;
d - диаметр стержня заводного или крепежного элемента,
так как именно в этом случае при повороте колец 8 или 9 на любой угол по меньшей мере по два отверстия на каждом из них
должны находиться напротив соответствующего окна 15, и каждое из колец 8 и 9 может быть снабжено механизмом его поворота в виде, например, самотормозящейся червячной пары (фиг.4,5), червяк 16 которой
установлен на корпусе 1 с возможностью взаимодействия с зубьями, выполненными на кольце (8 или 9).
Модуль поворота работает следующим образом.
Звено 2, находясь в одном из крайних положений, удерживается защелкой. При этом, если имел место предварительный натяг пружин 6 и 7, то угол закручивания одной из них, например пружины 6. оказывается
еще большим, а другой (7) уменьшается. По команде от управляющего устройства срабатывает электромагнит защелки и она выходит из гнезда подвижного звена 2, которое под действием более закрученной
пружины 6 начинает движение в сторону другого крайнего положения. Насадка включающегося при этом реверсивного двигателя 5, воздействуя на звено 2. сообщает ему дополнительную энергию, ком5 пенсирующую потери, что позволяет звену 2 перейти в другое крайнее положение, при
котором защелка попадает в гнездо звена 2, соответствующее этому положению. Двигатель 5 отключается, а пружина 1 оказывается более закрученной, чем пружина 6. Возможна конструкция привода и с одной пружиной.
Подзавод пружины, необходимый при настройке модуля, осуществляется следующим образом. В одно из трех отверстий, расположенных на боковой поверхности кольца 8 или 9. вставляется сквозь окно 14 корпуса 1 упор 13 (два других отверстия заняты крепежными винтами 12). Если это свободное отверстие оказывается в недоступном месте, выкручивают один из винтов 12, упор 13 вставляют на его место. Удерживая с помощью этого упора кольцо 8 или 9 от поворота под действием соответствующей пружины, ослабляют второй крепежный винт 12 или, если это необходимо, вынимают его, поворачивают кольцо с помощью упора 13. Если границы окна, сквозь которое вставлен упор 13, не позволяют осуществить поворот на требуемый угол, используют второй упор, который вставляют в соседнее резьбовое отверстие на настраиваемом кольце. Первый упор, препятствующий повороту, вынимают После окончания регулировки кольцо фиксируют с помощью крепежных винтбв 12. Точно так же поступают с другим кольцом. Если нет возможности по всей окружности корпуса выполнить окна 14, сквозь которые в кольца вставляются винты 12 или упоры 13, может образоваться как бы мертвая зона, в которой доступа к резьбовым отверстиям нет. В таком случае в кольцах выполняют дополнительные отверстия, диаметрально противоположные основным. Именно в эти дополнительные резьбовые отверстия и вставляются винты 12 и упоры 13, в то время как основные находятся в мертвой зоне.
В случае, если по каким-то соображениям невозможно выполнить несколько окон по всей окружности корпуса 1, можно обойтись одним окном 15, но при этом в кольцах должны быть выполнены резьбовые отверстия по всей его окружности. Для подзавода пружины необходимо переставлять упоры 13 поочередно в отверстия, которые оказываются напротив окна 15. После окончания регулировки угла закручивания пружины упоры 13 заменяются винтами 12.
Если по условиям эксплуатации требуется частая регулировка узла закручивания пружин 6 или 7, удобно снабдить модуль механизмом поворота кольца 8 или 9, выполненным, например, в виде червячной пары с самотормозящимся червяком 16. Дополнительных крепежных элементов
при этом не требуется, а следовательно, нет затрат времени на расфиксацию и фиксацию колец. Кроме того, упрощается и ускоряется процесс регулировки угла закручивания пружины.
Разборка и сборка модуля значительно упрощается из-за возможности взаимной ориентации колец 8 и 9 относительно друг друга и относительно корпуса 1, так как
при снятии корпуса 1 с его основания не происходит потеря формы пружин 6 и 7, и подвижное звено 2 остается в устойчивом положении.
15
Формула изобретения
мере одну плоскую спиральную пружину, один конец которой связан с выходным звеном, а другой конец имеет возможность регулировочного перемещения по круговой траектории в плоскости пружины, о т л и ч аю щ и и с я тем, что, с целью упрощения сборки модуля и его настройки, каждая пружина снабжена кольцом, расположенным соосно с выходным звеном в плоскости пружины и установленным на корпусе с возможностью его поворота вокруг своей оси и фиксации относительно корпуса, при этом второй конец пружины закреплен на кольце.
отверстия, расположенных диаметрально противоположно основным разьбовым отверстиям.
в нем упомянутых элементов крепления и упоров, при этом расстояние между соседними резьбовыми отверстия выбирается из условия
L - г 1
где t - расстояние между соседними резьбовыми отверстиями; I - ширина окна в корпусе; d - диаметр упора или крепежного элемента. 5. Модуль по п.1,отличающийся тем, что кольцо снабжено механизмом поворота вокруг его оси.
А-А
15
сриг.З
А-А
16
фиг&
фиг. 5
| Модуль резонансного манипулятора | 1988 |
|
SU1576304A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
