/
VJ
ю
s
о
Изобретение относится к машиностроению, а именно к манипуляторам резонансного типа, предназначенным для механизации основных и вспомогательных операций в различных отраслях промышленности.
Целью изобретения является повышение удобства эксплуатации за счет упрощения процесса настройки.
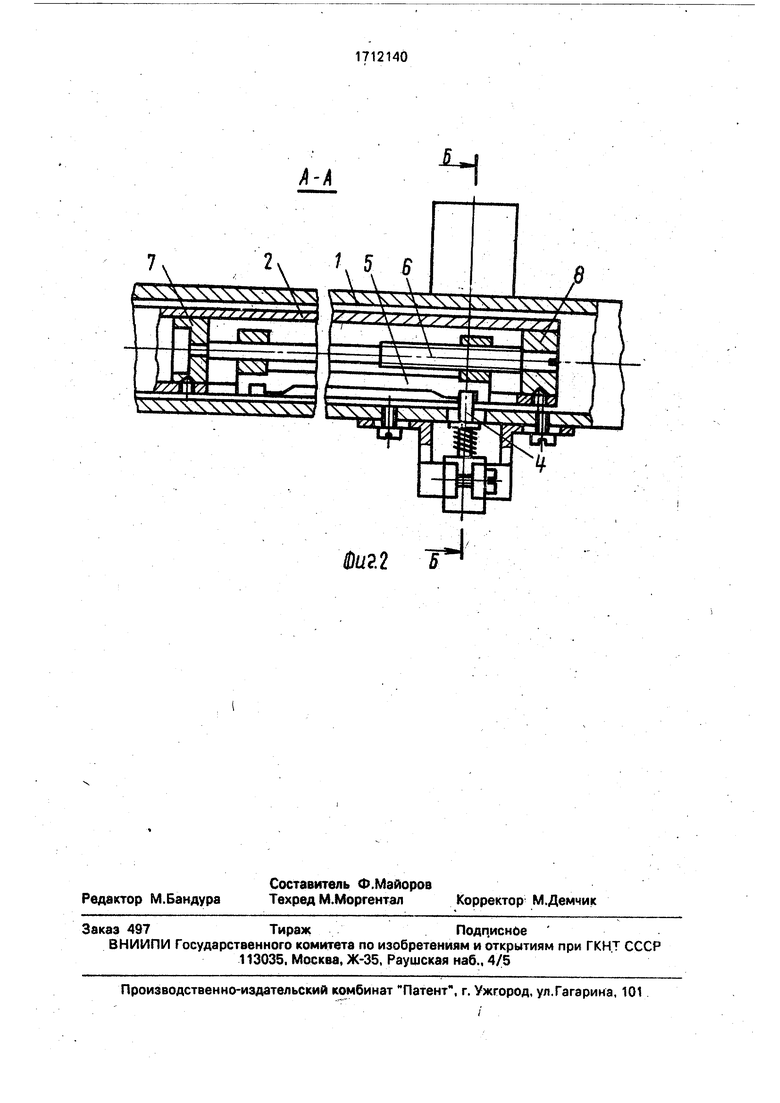
На фиг. 1 представлен модуль, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
Модуль резонансного манипулятора состоит из корпуса 1, в котором расположено подвижное звено 2 с закрепленным на нем схватом 3, перемещающееся в опорах качения (не показаны) и удерживаемое в крайних положениях фиксатором, выполненным в виде защелки, подвижная часть 4 которой с электромагнитным приводом закреплена с возможностью перемещения и фиксации на корпусе 1, и сменного элемента 5 с гнездами, закрепленного на гайке ходового винта б, установленного с возможностью вращения на опорах 7 и 8 во внутренней полости подвижного звена 2.
Если расстояние между гнездами достаточно велико и, следовательно, сменный элемент 5 имеет большую длину, то для обеспечения жесткости и из-за ограничений по свинчиваемости сменный элемент 5 снабжается двумя втулками (фиг. 2), расположенными на его краях, в одной из которых выполнено гладкое отверстие, а в другой, соосно первому, - резьбовое, и взаимодействующими с ходовым винтОм 6 (соответственно с гладкой и резьбовой его частью).
Природ перемещения подвижного звена 2 содержит пружины 9 и 10 и двигатель i 1 подкачки, насадка 12 которого находится в контакте с подвижным звеном 2.
Модуль резонансного манипулятора работает следующим образом.
Подвижное звено 2, находясь в одном из крайних положений, например в левом, удерживается подвижной частью 4 защелки. При этом пружина 9 находится в сжатом (ненапряженном) состоянии, а пружина 10в растянутом. По команду от управляющего устройства (не показано) срабатывает электромагнит части 4 защелки и она выходит из соответствующего этому положению гнезда сменного элемента 5 подвижного звена 2, которое под действием пружин 10 начинает движение в сторону другого крайнего положения. Насадка 12 включающегося при этом реверсивного двигателя 11, воздействуя на подвижное звено 2, сообщает ему дополнительную энергию, компенсирующую потери, что позволяет звену 2 перейти в положение, при котором защелка попадает и другое гнездо сменного элемента 5. При этом двигатель отключается, пружина 10 оказывается в сжатом состоянии, а пружина 9-в растянутом.
При установке части 4 защелки на равном расстоянии от гнезд элемента 5, когда звено 2 Находится в нейтральном положений, количество энергии, которое необходимо сообщить этому, звену на перемещения
0 его в одном направлении (до момента попадания части 4 заделки в одно из гнезд сменного элемента 5 подвижного звена 2), равно количеству энергии, необходимому для перемещения его в противоположном направлении. Отсюда равны и количества энергии, запасаемые упругими элементами 9 и 10 в любом из этих крайних положений, а следовательно, равны и количества дополнительной энергии, требующейся для обеспечения
0 перемещения подвижного звена из одного : крайнего положения в другое и обратно.
На практике, как правило, реальное нейтральное положение подвижного звена не совпадает с теоретическим. Это происходит, например, из-за отличия свойств упругих элементов, имеющих неизбежные отклонения в пределах допуска, причем каждая замена упругих элементов в процессе эксплуатации приводит к изменению этого нейтрального положения. Установка сменного элемента 5 с гнездами с возможностью регулирующего перемещения во внутренней полости подвижного звена 2 позволяет привести положение гнезд сменного элемента в соответствии реальному нейтральному положению подвижного звена 2 и, следовательно, избежать лишних энергозатрат.
Необходимость изменения нейтрального положения может возникнуть ив других случаях, например при перемещении модулем груза значитепьной массы в одном направлении. Такая настройка обеспечивает запас больиюго количества потенциальной
5 энергии у той пружины, которая находится в напряженном состоянии перед началом перемещения подвижного звена с грузом, и меньшей запас потенциальной энергии у пружины, за счет которой, в основном, происходит перемещение подвижного звена без груза.
Выполнение гнезд на сменном элементе позволяет, при необходимости, изменять величину хода подвижного звена 2. Это производится заменой одного сменного эле мента другим с отличающимся от первого расстоянием между гнездами. Имея в комплекте несколько сменных элементов с разными расстояниями между гнездами, можно обеспечить быструю переналадку величины хода подвижного эвена 2 в нужном диапазоне.
При этом, не требуется симметричное расположение гнезда на сменных элементах относительно элементов их крепления к 5 подвижному звену, так как эта симметричность обеспечивается перемещением сменного элемента 5 по ходовому винту6. IB результате отпадает необходимость в использовании сменных элементов одного и 10 того же габаритного размера (причем, максимального), что ведет к экономии материалов. К тому же регулировка положения сменного элемента относительно подвижной части 4 защелки Г1 роизводится 15 нием ходового винта, а это удобнее, чем изменение места закрепления заЩелки на корпусе, что может оказаться невозможный из-за плотности компоновки,и условий прочности корпуса. В данном случаеэто 20 ремещение определяется длиной ходового винта.V
Возможность регулирующего перемещения сменного элемента придает новые свойства конструкции и в случае, если за- 25 щелка также установлена с возможностью регулирующего перемещения.,.
Например, если tia-aa плотности компоновки элементов на корпусе перемещение части 4 защелки ограничено, может оказать- 30 ся, что даже полного ее хода недостаточно для необходимой регулировки положения подвижного звена,(
В этом случае перемещением сменного элемента в направлении, противоположном 35 перемещению части 4 защелки, добиваютсй их взаимного положения, обеспечивающего необходимую регулировку. Кроме того, если затем продолжить перемещение сменного элемента и при этом в том же направлении 40 переместить и часть 4 защелки (гюдвижйое звено при этом остается неподвижным), то
эта часть перейдет из своего крайнего положения в среднее, более удобное для возможной будущей регулировки, т.е. без изменения габаритов манипулятора и без изменения компоновки корпусных элементов можно добиться расширения пределов регулировки положения подвижного звена для приведения в соответствие нейтральному положению и повышения удобства в обслуживании.
Наконец, выполнение двух гнезд на одном элементе упрощает настройку; обеспечивая одновременность их перемещения во время настройки.
Формула изобретения
1.Модуль резонансного манипулятора, содержащий корпус, установленное в корпусе подвижное звено, имеющее внутреннюю полость, с приводом его перемещения, и фиксатор крайних положений подвижного звена, выполненный в виде защелки, подвижная часть которой расположена на корпусе с возможностью ее регулировочного перемещения, и установленного во внутренней полости подвижного звена элемента с гнездами для размещения подвижной части заЩелки, о тличающийся тем, что, с целью повышения удобства эксплуатации за счет упрощения процесса настройки, элемент с гнездами выполнен сменным и снабжен механизмом его регулировочного перемещения относительно подвижного звена.
2.Модуль по п. 1,отличающийся тем, что механизм перемещения сменного элемента с гнездами выполнен в виде винтовой передачи, винт которой установлен на опорах во внутренней полости подвижного звена с возможностью вращения вокруг оси, параллельной продольной оси подвижного звена, а сменный элемент с гнездами закреплен на гайке этой передачи.
to. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль резонансного манипулятора | 1989 |
|
SU1710335A1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1576304A1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1662837A1 |
| Модуль резонансного манипулятора | 1986 |
|
SU1799723A1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1662839A1 |
| Модуль резонансного манипулятора | 1985 |
|
SU1298069A1 |
| Модуль вертикального перемещения | 1986 |
|
SU1386444A1 |
| РЕЗОНАНСНЫЙ ПРИВОД | 1999 |
|
RU2162791C2 |
| Модуль вертикального перемещения | 1984 |
|
SU1229032A1 |
| Способ управления перемещением подвижного звена резонансного манипулятора | 1986 |
|
SU1785889A1 |
Изобретение относится к машиностроению, а именно к манипуляторам резонансного типа, предназначенным для механизации основных и вспомогательных операций в различных отраслях промышленности. Целью изобретения является по-X^вышение удобства эксплуатации за счет упрощения процесса настройки. Работа модуля резонансного манипулятора состоит в перемещении его подвижного звена 2. установленного в корпусе 1. из одного крайнего положения в другое под действием пружин 9 или 10 и двигателя Н. осуществляющего подкачку механической энергии, расходуемой на покрытие потерь. Для регулирования амплитуды колебаний звена 2 и его нейтрального положения подвижная часть ззщелки фиксатора установлена с возможностью регулировочного перемещения, а элемент с гнездами для размещения подвижной части выполнен сменным и уста- новлен на подвижном звене также с возможностью регулировочного перемещения. 1 з.п. ф-лы. 2 ил.
| Модуль резонансного манипулятора | 1989 |
|
SU1646846A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
