cL..
оо
00
о
4 4
N
KV
Изобретение относится к машиностроению, а именно к манипуляторам резонансного типа, предназначенным для механизации основных и вспомогательных операций в различных отраслях промышленности.
Целью изобретения является повышение надежности и удобства эксплуатации за счет повьш1ения точности регулирования.
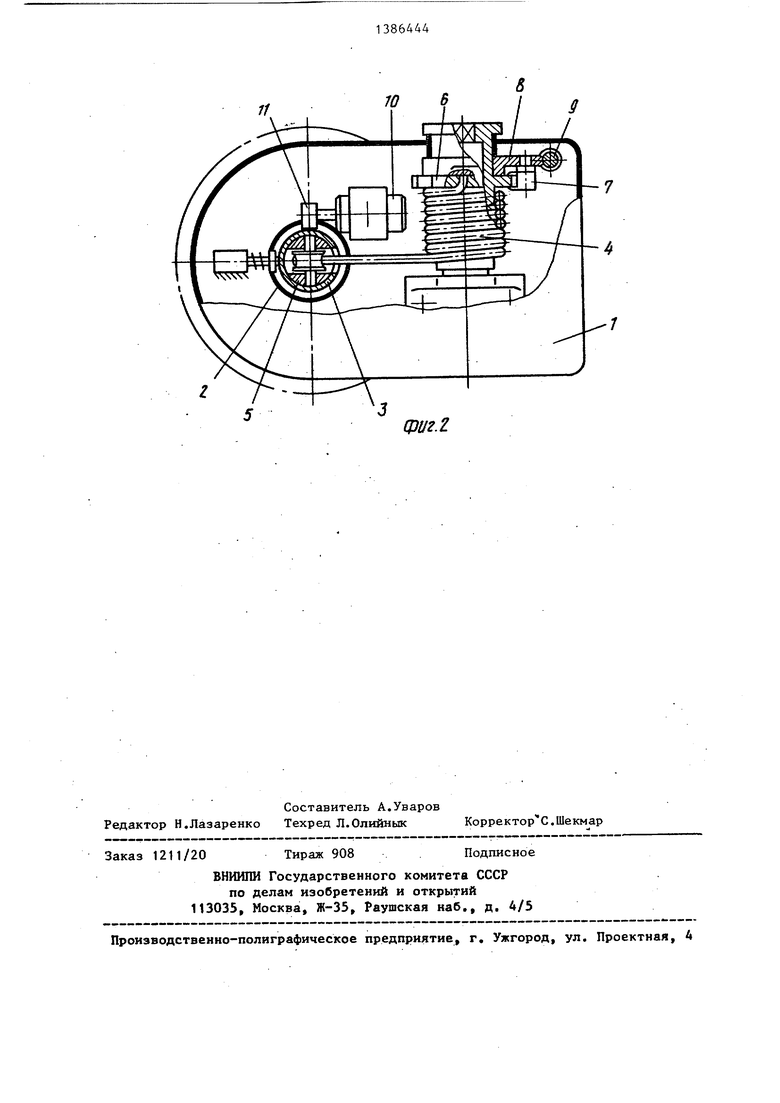
На фиг,1 представлен модуль вертикального перемещения, общий вид; на фиг,2 - то же, вид сверху.
Модуль вертикального перемещения состоит из корпуса 1, в опорах 2 которого установлено подвижное звено 3, удерживающееся в нейтральном положении упругим элементом 4 в виде пружины кручения, установленной на основании корпуса 1. Один конец этой пружины взаимодействует с подвижным звеном 3 через ролик 5 (для уменьшения трения). Другой конец закреплен на храповом колесе 6 узла регулировки нейтрального положения, установленном на боковой стенке корпуса 1, Наружный конец вала храпового колеса имеет шестигранник для заводного ключа. Храповое колесо 6 удерживается от проворота подпружиненной собачкой 7, ось которой укреплена на зубчатом колесе 8, свободно установленном на валу храпового колеса 6 с возможностью фиксации и поворота с помощью самотормозящего черв яка 9 на угол, соответствующий перемещению конца собачки 7 в пределах шага храпового колеса 6, Для сообщения дополнительной энергии подвижному звену служит реверсивный двигатель 10 с насадкой 11. В крайних положениях подвижное звено 3 удерживается фиксаторами 12 и 13. На подвижном звене 3 модуля вертикального перемещения закреплен модуль 14 горизонтального перемещения.
Модуль вертикального перемещения работает следующим образом,
Подвижное кольцо 3, удерживаемое упругим элементом 4 в нейтральном положении, переводится в одно из крайних положений, например в нижнее (фиг.1), и захватывается фиксатором 12. Пружина аккумулирует при этом энергию, необходимую для перемещения подвижного звена в противоположное крайнее положение (без учета потерь на трение). По команде от управляющего устройства (не показано) фиксатор
o
5
0
5
0
5
0
5
0
5
12 освобождает подвижное звено и оно начинает движение вверх. Одновременно включается двигатель 10, который, воздействуя насадкой 11 на подвижное звено, сообщает ему дополнительную энергию, компенсирукмцую потери. Явление резонанса, имеющее место в этом случае, позволяет использовать маломощный двигатель. В момент подхода к противоположному крайнему положению срабатывает фиксатор 13 этого поЛоже- ния. Двигатель 10 при этом отключается. При изменении веса переносимого груза нейтральное положение подвижного звена смещается. Так, при увеличении веса оно опускается до положения, в котором упругие силы пружины, возрастающие при ее закручивании, уравновешивают вес подвижного звена с грузом. Для установки сместившейся нейтральной точки в прежнее рабочее положение храповое колесо 6 (а следовательно, и связанный с ним конец пружины) поворачивается на необходимый угол, где оно фиксируется с помощью собачки 7, При этом грубая настройка производится поворотом храпового колеса 6 на нужное количество зубьев, а точная - поворотом с по- . мощью червяка 9 зубчатого колеса 8 с установленной на нем собачкой 7. Перемещение собачки передается на храповое колесо 6 и оно,, доворачиваясь на необходимый угол, занимает положение, соответствующее нужному положению Нейтральной точки подвижного звена.
Формула изобретения Модуль вертикалД)Ного перемещения, содержащий корпус, размещенное в нем подвижное звено с приводом его вертикального перемещения, включающим упругий элемент и узел регулировки нейтрального положения подвижного звена, выполненный в виде храпового колеса и собачки с механизмом перемещения и фиксации ее оси, отличающий- с я тем, что, с целью повышения надежности и удобства эксплуатации за счет повышения точности регулировки, механизм перемещения и фиксации оси собачки выполнен в виде самотормозящей червячной передачи, зубчатое колесо которой свободно установлено на оси храпового колеса и кинематически связано с собачкой, а червяк размещен в корпусе модуля.
//
фиг.г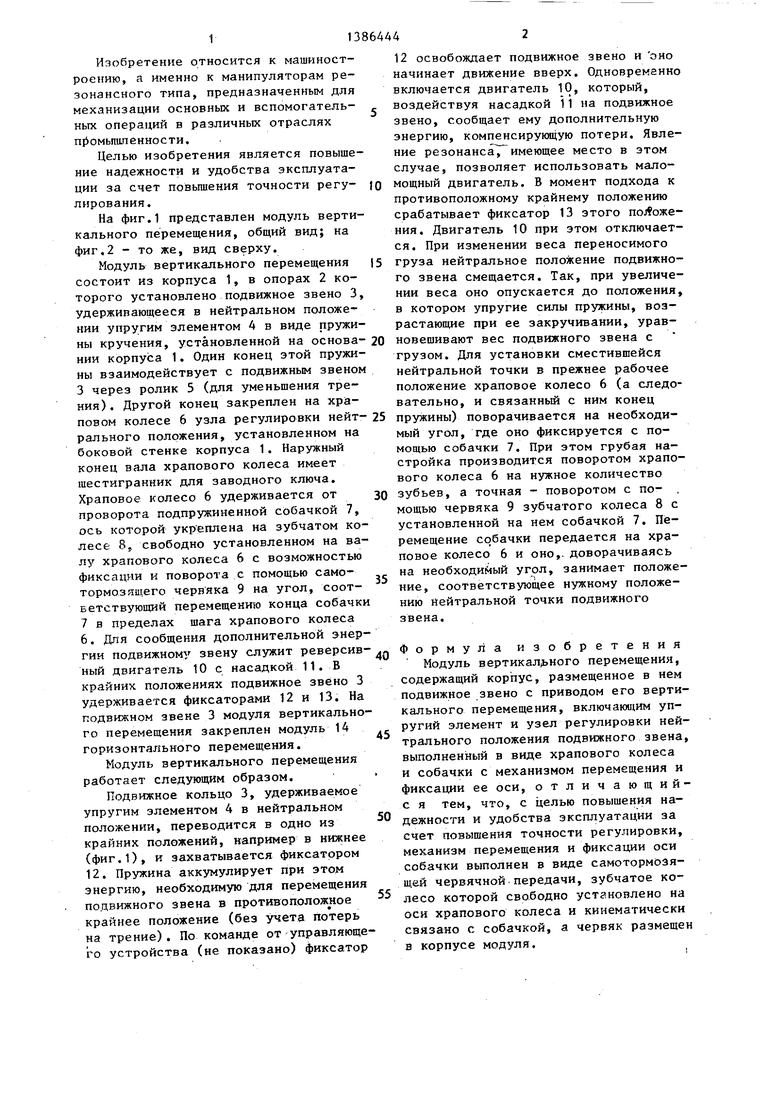
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль вертикального перемещения | 1984 |
|
SU1229032A1 |
| РЕЗОНАНСНЫЙ ПРИВОД | 1999 |
|
RU2162791C2 |
| Модуль резонансного манипулятора | 1988 |
|
SU1662837A1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1576304A1 |
| КРЕСЛО | 2015 |
|
RU2609543C1 |
| Модуль резонансного манипулятора | 1989 |
|
SU1712140A1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ БЕТОННЫХ ИЗДЕЛИЙ | 2009 |
|
RU2405672C1 |
| ЗАМОК С ДОВОДЧИКОМ ДВЕРИ ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2725123C1 |
| КРЕСЛО | 2015 |
|
RU2610086C1 |
| АГРЕГАТ ДЛЯ УКЛАДКИ ОПТОВОЛОКОННОГО КАБЕЛЯ НА ПРОВОД ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 1996 |
|
RU2124256C1 |
Изобретение относится к области машиностроения, а именно к манипуляторам резонансного типа, предназначенным для механизации основных и вспомогательных операций в различных отраслях промышленности. Целью изобретения является повьппение надежности и удобства эксплуатации за счет повышения точности регулирования. Подвижное звени 3, удерживаемое упругим элементом 4 в нейтральном положении. переводится в одно из крайних положений и захватывается одним из фиксаторов 12 или 13. По команде управления, например, фиксатор 12 освобождает подвижное звено 3 и оно перемещается вверх под действием упругого элемента 4. Для компенсации потерь на трение одновременно включается двигатель 10, способствующий вертикальному перемещению звена 3. Для регулировки нейтрального положения звена 3 поворачивают храповое колесо 6 на необходимый угол, где оно фиксируется с , собачки 7. Точную регулировку в пределе шага храпового колеса осуществляют вращением самотормозящегося червяка 9, который перемещает зубчатое колесо 8 с установленной на нем собачкой 7 в соответствующее положение . 2 ил, S С
Составитель А.Уваров Редактор Н.Лазаренко Техред Л.Олийнык Корректор С.Шекмар
Заказ 1211/20
Тираж 908
ВНИШШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Подписное
| Модуль вертикального перемещения | 1984 |
|
SU1229032A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
