Изобретение относится к машиностроению, а именно к манипуляторам резонансного типа, предназначенным для механизации основных и вспомогательных операций в различных отраслях промышленности
Целью изобретения является улучшение условий эксплуатации за счет упрощения настройки привода.
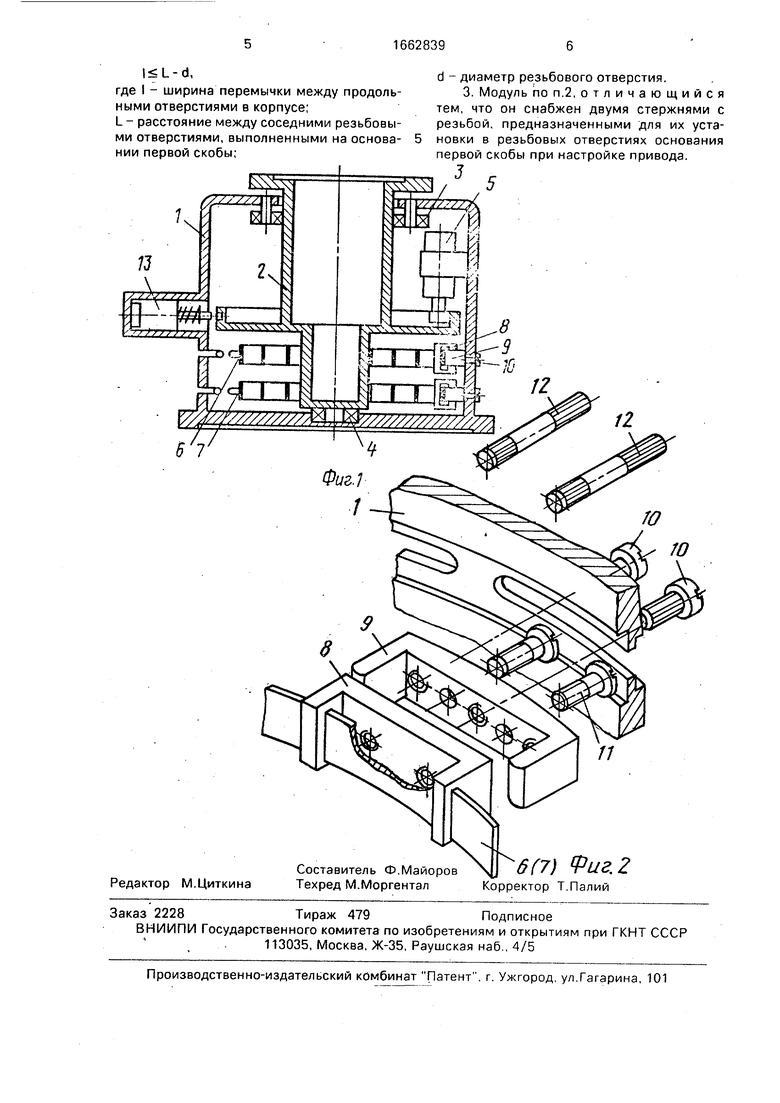
На фиг.1 представлен модуль, разрез; на фиг.2 - узел крепления пружины привода в изометрии.
Модуль состоит из корпуса 1, в котором расположено подвижное поворотное звено 2, установленное в подшипниках 3 и 4. Привод содержит двигатель 5 подкачки и две спиральные пружины 6 и 7, имеющие противоположное направление навивки, каждая из которых одним концом, например внутренним, закреплена на подвижном звене 2, а другим - на корпусе 1. Закрепление наружного ксжца каждой из пружин 6 и 7 на корпусе 1 осуществляется с помощью узла
крепления, дающего возможность изменять место захвата пружины, регулируя тем самым длину ее рабочей части (а следовательно, и жесткость), и состоящего из скобы 8, в отверстия на концах которой заведен конец соответствующей пружины 6 или 7, и скобы 9 (закрепленной с помощью винтов 10 в направляющем пазу корпуса 1), на выступы которой опирается конец пружины 6 или 7, притягиваемый к этим выступам при перемещении скобы 8 посредством винтов 11. Изменяя место положения узла крепления в направляющем пазу на внутренней поверхности корпуса 1 (для чего в дне паза выполнены продольные отверстия), можно при настройке привода с помощью стержней 12 как бы закручивать пружины 6 или 7, обеспечивая их предварительный натяг Для фиксации подвижного звена 2 в крайних положениях служит электромагнитная защелка 13, взаимодействующая с гнездами, выполненными на подвижном звене 2
Модуль поворота работает следующим образом.
Оо ю
00
ы ю
Подвижное звено 2, находясь в одном из крайних положений, удерживается защелкой 13. При этом, если имел место предварительный натяг пружин 6 и 7, угол закручивания одной из них, например пружины 6, оказывается еще большим, а другой уменьшается. По команде от управляющего устройства (не показано) срабатывает электромагнит защелки 13 и она выходит из гнезда подвижного звена 2, которое под действием более закрученной пружины 6 начинает движение в сторону другого крайнего положения. Насадка включающегося при этом реверсивного двигателя, воздействуя на подвижное звено 2, сообщает ему дополнительную энергию, компенсирующую потери, что позволяет звену 2 перейти в другое крайнее положение, при котором защелка 13 попадает в гнездо подвижного звена 2, соответствующее этому положению. Двигатель 5 отключается, а пружина 7 оказывается более закрученной, чем пружина 6. Возможна конструкция привода и с одной пружиной. Необходимой жесткости пружины добиваются перемещением конца пружины относительно скобы 9, для чего ослабляют натяжение винтов 11, уменьшая силу прижатия пружины к выступающим концам скобы 9, что позволяет освободить конец пружины б или 7 и переместить его в нужную сторону.
Подзавод пружины, также необходимый для настройки привода, осуществляется следующим образом. Ослабляют натяжение двух винтов 10 (возможен вариант крепления и с помощью одного винта), уменьшая силу трений между скобой 9 узла крепления и дном направляющего паза на внутренней поверхности корпуса, перемещают узел крепления вместе с зажатым в нем. концом пружины 6 или 7 вдоль направляющего паза в нужном направлении с последующей фиксацией с помощью тех же винтов 10. Если длины продольного отверстия, выполненного в дне этого направляющего паза и скозь которое пропущены винты 10, недостаточно для необходимого перемещения узла крепления, вывинчивают один из винтов 10 (а именно тот из них, который находится дальше от перемычки между продольными отёерстиями, препятствующей перемещению узла крепления), а на его место ввинчивают резьбовой стержень 12. Удерживая весь узел крепления за выступающий конец этого стержня, вывинчивают второй из винтов 10, после чего узел крепления перемещают до упора стержня 12 в ту же перемычку, При соблюдении условия L - - d 2:1, где L- расстояние между соседними резьбовыми отверстиями на скобе узла
крепления, d - диаметр резьбового отверстия, I - ширина перемычки между двумя смежными продольными отверстиями корпуса, резьбовое отверстие в скобе 9, не за. нятое винтом 10, оказывается в соседнем продольном пазу (причем такие пазы могут быть выполнены по всей окружности корпуса). Вставив в это отверстие второй резьбовой стержень 12, с его помощью
продолжают перемещение узла крепления, вывинтив предварительно первый из стержней 12. После того как узел крепления оказывается в нужном месте, в свободные резьбовые отверстия в скобе 9 ввинчивают i
5 винты 10. При необходимости, если доступ к одному из этих отверстий закрыт, вывинчивают резьбовой стержень 12 и на его место ставят второй винт 10.
Независимость положения узла крепле0 ния относительно конца пружины и узла крепления относительно корпуса значительно улучшает условия эксплуатации, т к при расфиксации узла крепления относительно корпуса не происходит расфиксация
5 конца пружины, т.е не происходит изменение жесткости и становится возможной регулировка натяжения пружин с наружной стороны корпуса, что, помимо улучшения условий эксплуатации, упрощает настройку,
0 т.к. не требуется разборки модуля. Формулаизобретения 1. Модуль резонансного манипулятора, содержащий привод, включающий по меньшей мере одну спиральную пружину с узлом
5 ее крепления, установленным на корпусе модуля, отличающийся тем, что, с целью улучшения условий эксплуатации за счет упрощения настройки привода, узел крепления пружины выполнен в виде двух скоб,
0 первая из которых установлена своим основанием на внутренней поверхности корпуса с возможностью регулировочного перемещения и фиксации, а вторая расположена в первой скобе с возможностью перемеще5 ния и снабжена элементами ее фиксации относительно первой скобы, при этом на концах второй скобы выполнены отверстия, в которых размещен конец спиральной пружины.
02. Модуль по п. 1,.о т л и ч а ю щ и и с я
тем, что он снабжен двумя винтами, на внутренней поверхности корпуса выполнен кольцевой паз, а в основании первой скобы выполнены три резьбовых отверстия, при
5 этом в пазу корпуса выполнены продольнь.3 отверстия, в которых расположены винты, установленные также в резьбовых отверстиях первой скобы, а ширина перемычки между продольными отверстиями в корпусе определяется из условия
,
где I - ширина перемычки между продольными отверстиями в корпусе; L - расстояние между соседними резьбовыми отверстиями, выполненными на основании первой скобы;
Редактор М.Циткина
Составитель Ф.Майоров Техред М.Моргентал
d - диаметр резьбового отверстия.
3. Модуль по п 2, отличающийся тем, что он снабжен двумя стержнями с резьбой, предназначенными для их установки в резьбовых отверстиях основания первой скобы при настройке привода.
J 5
6(7) Фиг, 2
Корректор Т Палий
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль резонансного манипулятора | 1988 |
|
SU1662837A1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1576304A1 |
| Модуль резонансного манипулятора | 1989 |
|
SU1710335A1 |
| УСТРОЙСТВО ДЛЯ ИМПРЕГНАЦИИ КОСТНЫХ ФРАГМЕНТОВ ПРИ ТРАВМАТИЧЕСКОМ СТЕНОЗЕ ПОЗВОНОЧНОГО КАНАЛА | 2014 |
|
RU2568769C1 |
| Модуль резонансного манипулятора | 1989 |
|
SU1712140A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ АБРАМОВА В.А. | 2015 |
|
RU2600953C1 |
| Универсальный деревообрабатывающий станок | 1990 |
|
SU1797567A3 |
| Ортопедический трансформер | 2017 |
|
RU2687610C2 |
| УСТРОЙСТВО ДЛЯ ВРЕМЕННОЙ ЗАДЕЛКИ ПРОБОИН И ТРЕЩИН В ЗАПОЛНЕННЫХ ЖИДКОСТЬЮ СТАЛЬНЫХ РЕЗЕРВУАРАХ | 2012 |
|
RU2481224C1 |
| РАБОЧИЙ ИНСТРУМЕНТ, НАПРАВЛЯЕМЫЙ ВРУЧНУЮ | 2014 |
|
RU2669958C2 |
Изобретение относится к машиностроению, а именно к манипуляторам резонансного типа, предназначенным для механизации основных и вспомогательных операций в различных отраслях промышленности. Целью изобретения является улучшение условий эксплуатации за счет упрощения настройки привода. Необходимый для настройки привода поворотного звена натяг двух или одной из спиральных пружин 6, 7 осуществляется за счет перемещения узла крепления пружины, выполненного в виде двух скоб 8 и 9, расположенных одна в другой вдоль кольцевого паза корпуса 1. Для перемещения узла крепления пружины и его фиксации в пазу выполнены продольные отверстия для размещения в них винтов 10 и стержней 12. 2 з.п.ф-лы, 2 ил.
| Модуль резонансного манипулятора | 1988 |
|
SU1576304A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
