Изобретение относится к машиностроению, а именно к манипуляторам резонансного типа, предназначенным для механизации основных и вспомогательных операций в различных отраслях промышленности.
Цель изобретения - упрощение настройки.
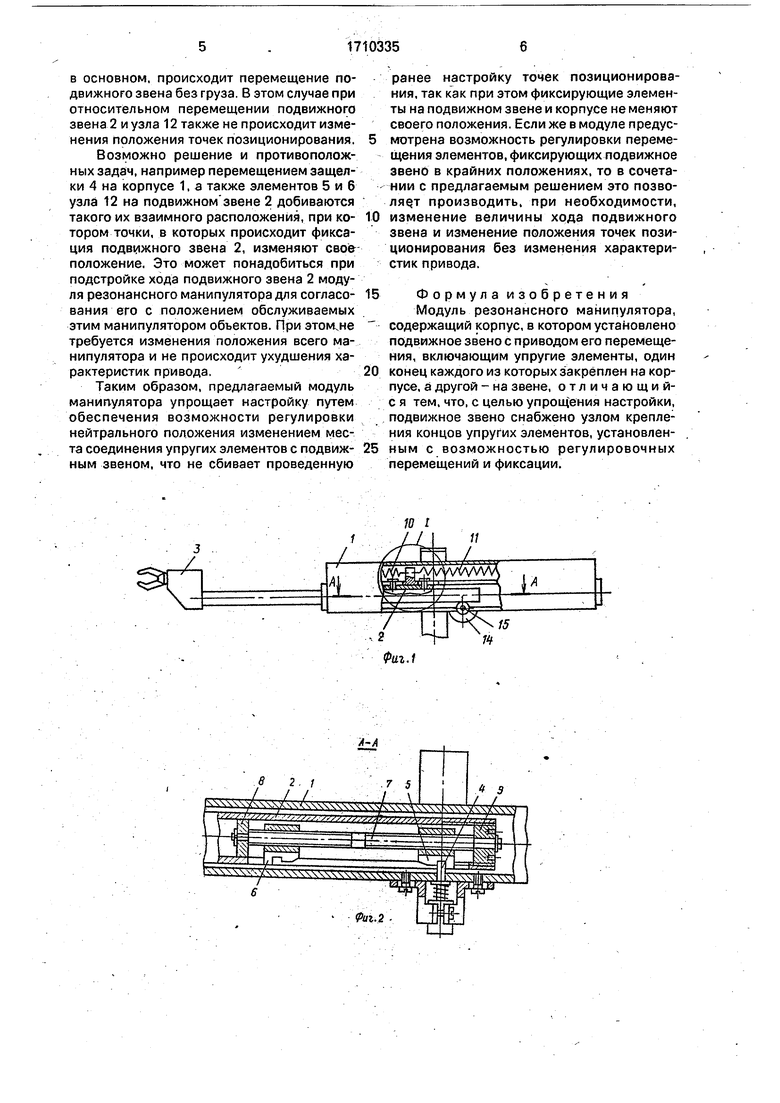
На фиг. 1 представлен модуль манипулятора, общий вид; на фиг. 2 - разрез А-А на фиг. 1: на фиг. 3 - узел I на фиг. 1.
Модуль резонансного манипулятора состоит из корпуса 1, в котором расположено подвижное звено 2с закрепленным на нем схватом 3, перемещающееся в опорах качения (не показаны) и удерживаемое в крайних положениях фиксирующими элементами в виде электромагнитной защелки 4, закрепленной на корпусе 1, и элементов 5 и-б с пазом на наружной поверхности и резьбой противоположных направлений (возможен вариант и с резьбой одного направления), каждый из которых установлен на соответствующей резьбе ходового винта 7, расположенного во внутренней полости подвижного звена 2 на опорах 8 и 9 и имеющего возможность вращения, а при необходимости - осевого перемещения. Привод перемещения подвижного звена 2 содержит упругие элементы, например пружины 10 и 11, каждая из которых одним концом закреплена на корпусе 1, а другим-на узле 12 крепления концов упругих элементов, установленном на подвижном звене 2с возможностью регулировочных перемещений и фиксации на нем (например, за счет удлиненных пазов под крепежные винты 13, выполненных в основании узла 12)и двигатель 14 подкачки, насадка 15 которого находится в контакте с подвижным звеном 2.
Модуль резонансного манипулятора работает следующим образом.
Подвижное звено 2, находясь а одном из крайних положений, например в левом, удерживается защелкой 4. При этом пружина 10 находится в сжатом (ненапряженном) состоянии, а пружина 11 - в растянутом. По команде от управляющего устройства (не показано) срабатывает электромагнит защелки 4 и она выходит из паза элемента 5 подвижного звена 2, которое под действием пружины 11 начинает движение в сторону другого крайнего положения. Насадка 15 включающегося при этом реверсивного двигателя 14, воздействуя на подвижное звено 2, сообщает ему дополнительную энергию, компенсирующую потери, что позволяет звену 2 перейти в положение, при котором защелка попадает в паз элемента 6. При этом двигатель 14 отключается, пружина 11 оказывается в сжатом состоянии, а пружина 10 - растянутом.
При установке защелки 4 на равном расстоянии от пазов в элементах 5 и 6
подвижного звена 2, когда оно находится в нейтральном положении, количество энергии, которое необходимо сообщать подвижному звену 2 для перемещения его в одном направлении (до момента попадания защелки в один из пазов, например в паз элемента 5), равно количеству энергии, необходимому для перемещения его в противоположном направлении (до паза элемента 6). Отсюда равны и количества энергии, запасаемые упругими элементами 10 и 11 в любом из этих крайних положений, а следовательно, равны и количества дополнительной энергии, требующейся для обеспечения перемещения подвижного звена из одного крайнего
0 положения в другое и обратно.
На практике реальное нейтральное .положение подвижного звена не совпадает с теоретическим. Это происходит, например, из-за отличия свойств упругих элементов,
5 имеющих неизбежные отклонения в. пределах допуска, причем каждая замена упругих элементов в процессе эксплуатации приводит к изменению этого нейтрального положения. Закрепление концов упругих
0 элементов на узле 12, имеющем возможность перемещения по подвижному звену 2, позволяет привести подвижное звено 2 в прежнее (расчетное) нейтральное положение, т.е. у узла 12 может оказаться новое
5 нейтральное положение, определяемое свойствами упругих элементов и вслед за ним это же нейтральное положение занимает и подвижное звено 2, но относительным перемещением узла 12 и подвижного звена
0 2 последнее переводят в положение, при котором его элементы 5 и 6 опять оказываются на равном расстоянии от защелки 4.
В итоге после регулировки подвижного звена 2 возвращается в прежнее положе-.
5 ние, а следовательно, не происходит изменения точек позиционирования, поскольку
место закрепления элементов фиксации на корпусе 1 и на подвижном звене 2 не изменяется.
0 Иногда бывает полезным специально изменить нейтральное положение, сместив его в ту или другую сторону, например при перемещении модулем груза значительной массы в одном направлении. Такая настройка обеспечивает запас большего количества потенциальной энергии у той пружины, которая находится в напряженном состоянии перед началом перемещения подвижного звена с грузом и меньший запас потенциальной энергии у пружины, за счет которой.
в основном, происходит перемещение подвижного звена без груза. В этом случае при относительном перемещении подвижного звена 2 и узла 12 также не происходит изменения положения точек позиционирования.
Возможно решение и противоположных задач, например перемещением защелки 4 на корпусе 1. а также элементов 5 и 6 узла 12 на подвижномзвене 2 добиваются такого их взаимного расположения, при котором точки, в которых происходит фиксация подв«/1жного звена 2, изменяют своеположение. Это может понадобиться при подстройке хода подвижного звена 2 модуля резонансного манипулятора для согласования его с положением обслуживаемых зтим манипулятором объектов. При требуется изменения положения всего манипулятора и не происходит ухудшения характеристик привода.
Таким образом, предлагаемый модуль манипулятора упрощает настройку путем обеспечения возможности регулировки нейтрального положения изменением места соединения упругих элементов с подвижным звеном, что не сбивает проведенную
ранее настройку точек позиционирования, так как при этом фиксирующие элементы на подвижном звене и корпусе не меняют своего положения. Если же в модуле предусмотрена возможность регулировки перемещения элементов, фиксирующих подвижное звено в крайних положениях, то в сочетании с предлагаемым решением это позволя т производить, при необходимости, изменение величины хода подвижного звена и изменение положения точек позиционирования без изменения характеристик привода.
Ф о р м у л а и 3 о б р е те н и я Модуль резонансного манипулятора, содержащий корпус, в котором установлено подвижное звено с приводом его перемещения, включающим упругие элементы, один конец каждого из которых закреплен на корпусе, а другой - на звене, отличающийс я тем, что, с целью упрощ ения настройки, подвижное звено снабжено узлом крепления концов упругих элементов, установленным с возможностью регулировочных перемещений и фиксации.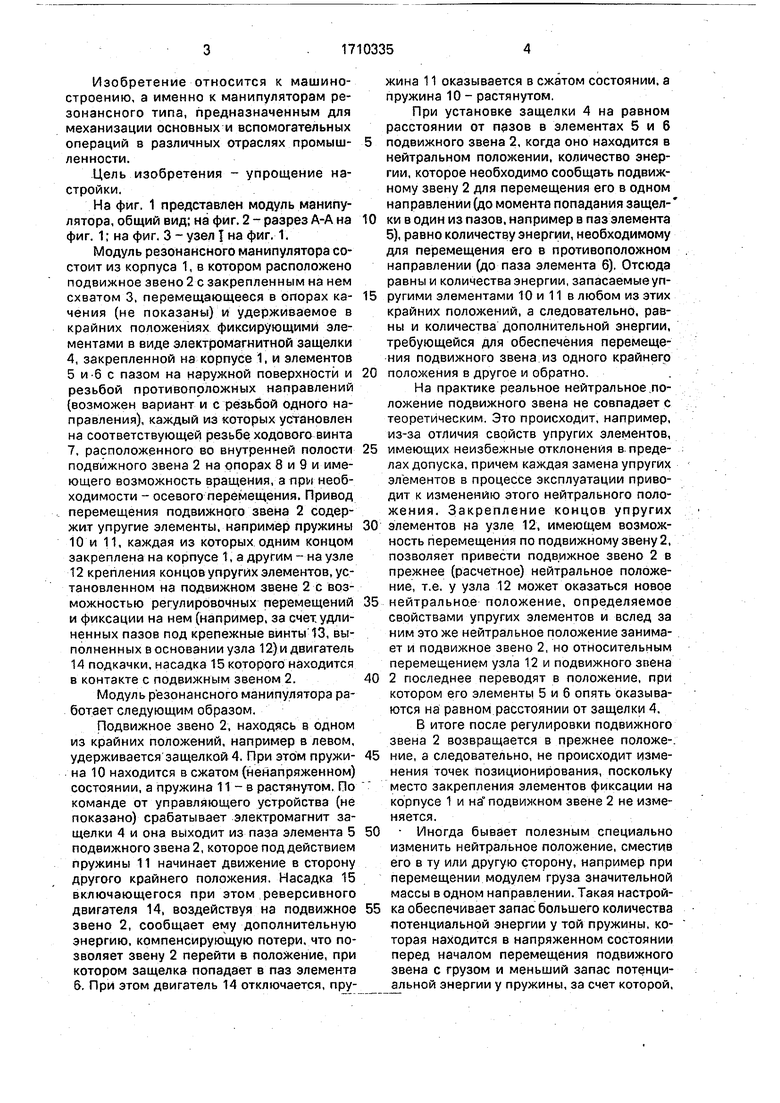
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль резонансного манипулятора | 1989 |
|
SU1712140A1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1576304A1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1662839A1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1662837A1 |
| Модуль вертикального перемещения | 1986 |
|
SU1386444A1 |
| Модуль резонансного манипулятора | 1986 |
|
SU1799723A1 |
| Модуль резонансного манипулятора | 1985 |
|
SU1298069A1 |
| Модуль вертикального перемещения | 1984 |
|
SU1229032A1 |
| РЕЗОНАНСНЫЙ ПРИВОД | 1999 |
|
RU2162791C2 |
| Резонансный робот | 1988 |
|
SU1562129A1 |
Изобретение относится к машиностроению, а именно к манипуляторам резонансного типа, предназначенным для механизации основных и вспомогательных операций в различных отраслях промышленности. Цель изобретения - упрощение настройки. Для регулировки нейтрального положения звена 2 при на стройке модуля происходит изменение регулировочных перемещений упругих элементов (пружин 10 и 11) со звеном 2 за счет регулировочных перемещений узла 12. что не сбивает проведенную ранее настройку точек позиционирования. 3 ил.ч"^^ЁоCJыСП
| Модуль резонансного манипулятора | 1989 |
|
SU1646846A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
