фие. /
Изобретение относится к машиностроению, а именно к манипуляторам резонансного типа, предназначенным для механизации основных и вспомогательных операций в различных отраслях промышленности.
Целью изобретения является повышение надежности за счет исключения работы пружины в зоне знакопеременных JQ нагрузок и расширения диапазона регулирования .
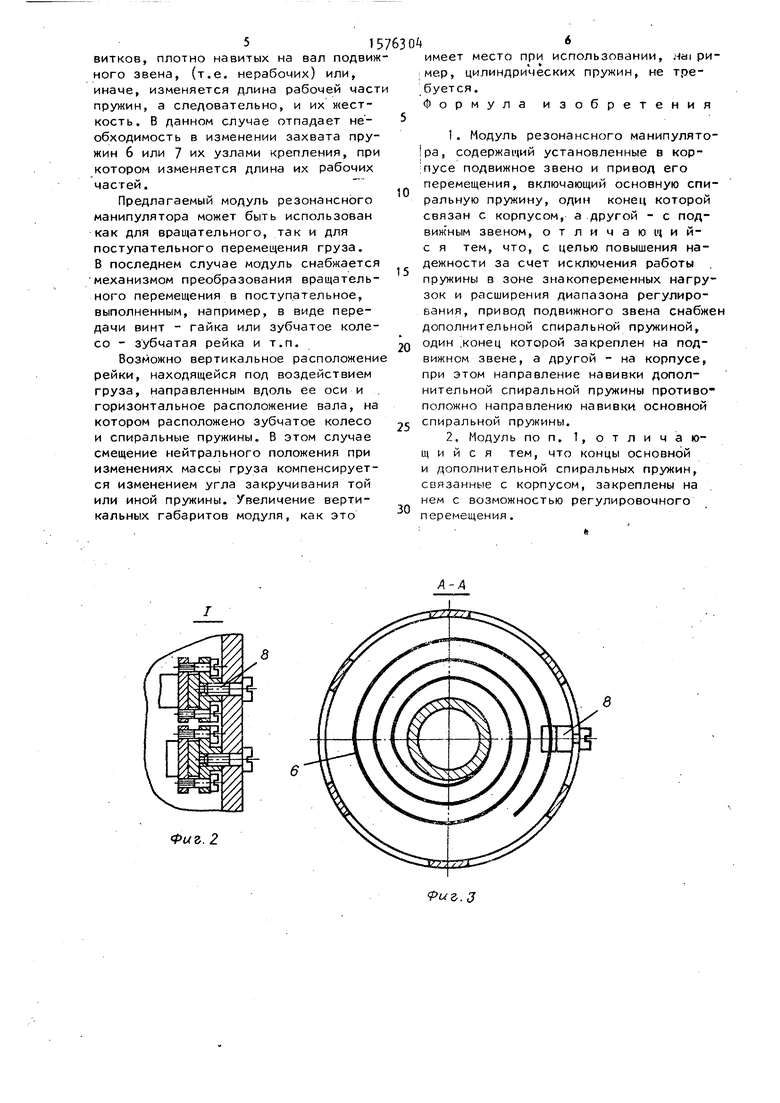
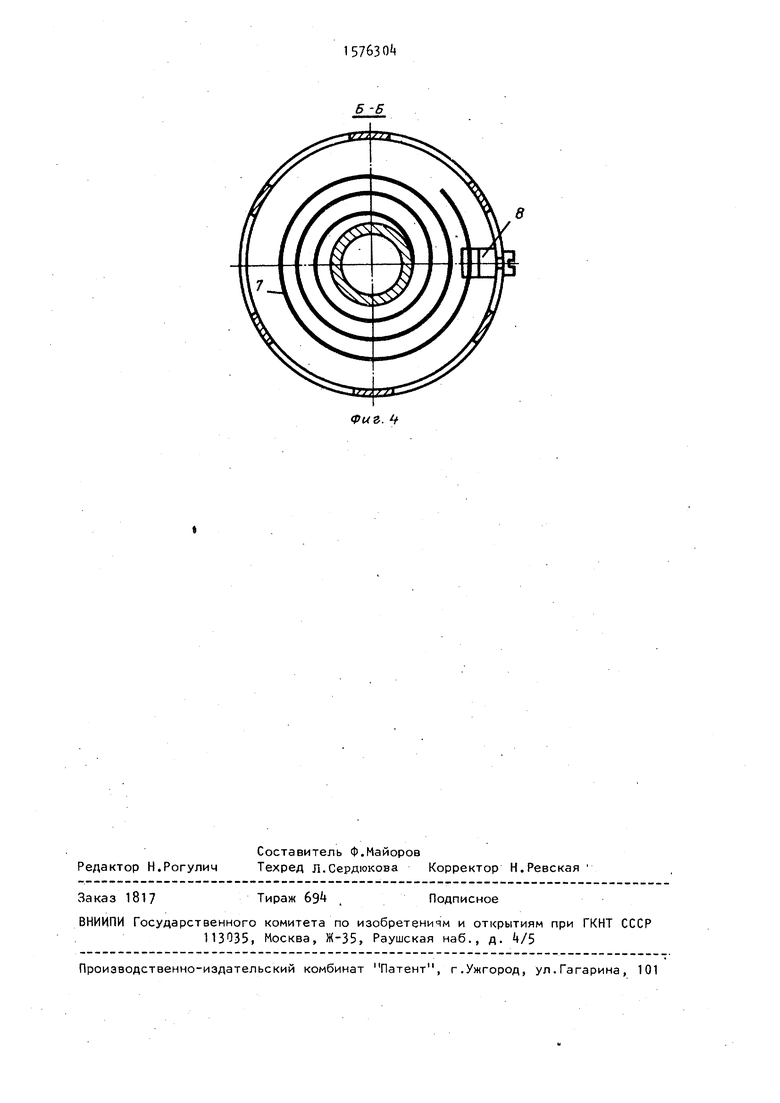
На фиг. 1 представлен модуль, общий вид; на фиг. 2 - узел I на фиг.1
(узел крепления наружного конца пружины к корпусу); на фиг. 3 - разрез А-А на фиг. 1; на фиг. А - разрез Б-Б на фиг. 1.
Модуль состоит из корпуса 1, в котором расположено подвижное (поворотное) звено 2, установленное в подшипниках 3 и „ Привод содержит двигатель 5 подкачки и две спиральные пружины основную 6 и дополнительную 7, имеющие противоположное направление навивки, каждая из которых одним концом, например внутренним, закреплена на подвижном звене 2, а другим - на корпусе 1. Закрепление наружного конца каждой из пружин 6 и 7 на корпусе 1 осуществляется, например, с помощью узла 8 крепления, дающего возможность изменять место закрепления пружин, регулируя, тем самым, длину ее рабочей части, а следова 5
20
25
30
закрученной пружины Ь начинает дв жение в сторону другого крайнего положения. Насадка включающегося этом реверсивного двигателя 5, во действуя на подвижное звено 2, со щает ему дополнительную энергию, компенсирующую потери что позвол звену 2 перейти в положение, при котором защелка 9 попадает а гнез подвижного звена, соответствующее этому крайнему положению. Двигате
5отключается, а пружина 7 оказыв ется более закрученной, чем пружи 6. Более предпочтительным являетс такой предварительный натяг пружи
7, при котором в любом ,из кр них положений подвижного звена 2 обе пружины находятся под нагрузк одного знака.
Такое нагружение значительно у личивает срок службы пружин и, к того, исключает люфт в местах сое нения пружин с подвижным звеном и корпусом Наличие дополнительной пружины с противоположным направл ем навивки расширяет, кроме того, пределы настройки привода, так ка одновременным укорачиваем или удл нием рабочих частей обеих пружин можно регулировать их жесткость в широких пределах, не изменяя нейт рального положения подвижного зве что невозможно при одной пружине, так как изменение длины рабочей ч
тельно, и жесткость. Помимо того, пе- ти пружины для обеспечения нужной
ремещая узел 8 крепления по внутренней поверхности корпуса по круговой траектории, можно при настройке при- вода как бы закручивать пружины 6 или 7, обеспечивая их предварительный натяг. Для фиксации подвижного звена 2 в крайних положениях служит электромагнитная защелка 9 взаимодействующая с гнездами, выполненными на подвижном звене 2.
Модуль работает следующим образом. Подвижное звено 2, находясь в одном из крайних положений, удерживается защелкой 9. При этом, если имел место предварительный натяг пружин 6 и 7, то угол закручивания одной из них, например пружины 6, оказывается еще большим, а другой (7) уменьшается. По команде от управляющего устройства (не п оказано) срабатывает электромагнит защелки 9 и она выходит из гнезда подвижного звена 2, которое под действием более
40
45
50
55
жесткости, влекло бы за собой и и нение нейтрального положения подв ного звена в таких пределах, когд нормальная работа привода была бы нарушена.
В некоторых случаях может оказ ся необходимым изменить жесткость только одной пружины, тогда смеще нейтрального положения, неизбежно при этом, компенсируется соответс вующим перемещением узла креплени данной пружины по внутренней пове ности корпуса. Если такое перемещ невозможно, (например, из-за недо татка места), подобная коррекция обеспечивается соответствующим пе мещением узла крепления второй пр жины. Возможно и совместное их пе мещение. И, наконец, возможен спо регулировки жесткости пружины пут перемещения концов пружин, связан ,с корпусом, в противоположных нап пениях. При этом меняется количес
5
0
5
0
закрученной пружины Ь начинает движение в сторону другого крайнего положения. Насадка включающегося при этом реверсивного двигателя 5, воздействуя на подвижное звено 2, сообщает ему дополнительную энергию, компенсирующую потери что позволяет звену 2 перейти в положение, при котором защелка 9 попадает а гнездо подвижного звена, соответствующее этому крайнему положению. Двигатель
5отключается, а пружина 7 оказывается более закрученной, чем пружина 6. Более предпочтительным является такой предварительный натяг пружин
7, при котором в любом ,из крайних положений подвижного звена 2 обе пружины находятся под нагрузкой одного знака.
Такое нагружение значительно увеличивает срок службы пружин и, кроме того, исключает люфт в местах соединения пружин с подвижным звеном или корпусом Наличие дополнительной пружины с противоположным направлением навивки расширяет, кроме того, пределы настройки привода, так как одновременным укорачиваем или удлинением рабочих частей обеих пружин можно регулировать их жесткость в широких пределах, не изменяя нейтрального положения подвижного звена, что невозможно при одной пружине, так как изменение длины рабочей час0
5
0
5
жесткости, влекло бы за собой и из л.- нение нейтрального положения подвижного звена в таких пределах, когда нормальная работа привода была бы нарушена.
В некоторых случаях может оказать- ся необходимым изменить жесткость только одной пружины, тогда смещение нейтрального положения, неизбежное при этом, компенсируется соответствующим перемещением узла крепления данной пружины по внутренней поверхности корпуса. Если такое перемещение невозможно, (например, из-за недостатка места), подобная коррекция обеспечивается соответствующим перемещением узла крепления второй пружины. Возможно и совместное их перемещение. И, наконец, возможен способ регулировки жесткости пружины путем перемещения концов пружин, связанных ,с корпусом, в противоположных направ- пениях. При этом меняется количество.
витков, плотно навитых на вал подвижного звена, (т.е. нерабочих) или, иначе, изменяется длина рабочей част пружин, а следовательно, и их жесткость. В данном случае отпадает необходимость в изменении захвата пружин 6 или 7 их узлами крепления, при котором изменяется длина их рабочих частей.
Предлагаемый модуль резонансного манипулятора может быть использован как для вращательного, так и для поступательного перемещения груза. В последнем случае модуль снабжается механизмом преобразования вращательного перемещения в поступательное, выполненным, например, в виде передачи винт - гайка или зубчатое колесо - зубчатая рейка и т.п.
Возможно вертикальное расположени рейки, находящейся под воздействием груза, направленным вдоль ее оси и горизонтальное расположение вала, на котором расположено зубчатое колесо и спиральные пружины. В этом случае смещение нейтрального положения при изменениях массы груза компенсируется изменением угла закручивания той или иной пружины. Увеличение вертикальных габаритов модупя, как это
7630
10
15
20
25
30
имеет место при использовании, HOI ри- мер, цилиндрических пружин, не требуется. Формула изобретения
1.Модуль резонансного манипулято- |ра, содержащий установленные в корпусе подвижное звено и привод его перемещения, включающий основную спиральную пружину, один конец которой связан с корпусом, а другой - с под- виж ным звеном, отличающийс я тем, что, с целью повышения надежности за смет исключения работы пружины в зоне знакопеременных нагрузок и расширения диапазона регулирования, привод подвижного звена снабжен дополнительной спиральной пружиной, один конец которой закреплен на подвижном звене, а другой - на корпусе, при этом направление навивки дополнительной спиральной пружины противоположно направлению навивки основной спиральной пружины.
2.Модуль по п. 1, отличаю- щ и и с я тем, что концы основной
и дополнительной спиральных пружин, связанные с корпусом, закреплены на нем с возможностью регулировочного перемещения.
«
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль резонансного манипулятора | 1988 |
|
SU1662839A1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1662837A1 |
| Модуль резонансного манипулятора | 1989 |
|
SU1710335A1 |
| Модуль резонансного манипулятора | 1985 |
|
SU1298069A1 |
| Модуль резонансного манипулятора | 1989 |
|
SU1712140A1 |
| РЕГУЛЯТОР АВТОКОЛЕБАНИЙ | 1992 |
|
RU2006902C1 |
| Модуль резонансного манипулятора | 1986 |
|
SU1799723A1 |
| Модуль вертикального перемещения | 1986 |
|
SU1386444A1 |
| Узел крепления конца спиральной пружины | 1988 |
|
SU1785890A1 |
| Модуль вертикального перемещения | 1984 |
|
SU1229032A1 |
Изобретение относится к машиностроению, а именно к манипуляторам резонансного типа, предназначенным для механизации основных и вспомогательных операций в различных отраслях промышленности. Целью изобретения является повышение надежности за счет исключения работы пружины в зоне знакопеременных нагрузок и расширения диапазона регулирования. Модуль поворота состоит из корпуса 1 с подвижным звеном 2 и фиксаторами крайних положений. Привод перемещения подвижного звена 2 содержит двигатель подкачки 5 и две спиральные пружины: основную 6 и дополнительную 7, каждая из которых одним концом закреплена на корпусе 1, а другим - на подвижном звене 2. Причем направление навивки одной пружины противоположно направлению навивки другой, а концы пружин, связанные с корпусом 1, закреплены на нем с возможностью регулировочного перемещения для смещения нейтрального положения звена или изменения жесткости пружин. 1 з.п. ф-лы, 4 ил.
Фиг 2
Фиъ.З
Редактор Н.Рогулич
Составитель Ф.Майоров
Техред л.Сердюкова Корректор Н.Ревская
Заказ 1817
Тираж 69
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г.Ужгород, ул.Гагарина, 101
Рие. +
Подписное
| Механическая рука | 1975 |
|
SU568346A3 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
