контролируемым или управляемым объектом, что ухудшает его характеристики, наличие противодействующего момента на объект.
Большинство указанных недостатков устраняет использование оптических способов и средств измерительного преобразова- нмя механических величин, что обеспечивает практически полное устранение возмущающего воздействия измерительного преобразователя на контролируемый или управляемый объект и возможность дистанционного контроля без прямого механического контакта с объектом.
Наиболее близким по технической сущности к данному изобретению является одномерное устройство измерения скорости перемещения, содержащее блок подсветки объекта световым потоком, закрепленный на объекте светоконтрастный пространственный модулятор, оптически сопряженный с блоком подсветки и объектом, фотоприемник, электронный блок измерения перемещения и дифференцирующее устройство. К достоинствам прототипа относятся возможность дистанционного измерения перемещения и скорости перемещения в режиме реверса направления перемещения, отсутствие возмущающего воздействия на объект.
Недостатком известного устройстоп является то, что оно позволяет производить только одномерные измерения и имеет менее предпочтительный перед абсолютным накапливающий принцип измерения.
Целью изобретения является расширение функциональных возможностей устройства за счет одновременного измерения скорости вращения, угловой скорости и угла прецессии объекта.
Указанная цель достигается тем, чго в устройстве, содержащем блок подсветки объекта световым потоком, закрепленный на объекте светоконтрастный пространственный модулятор, оптически сопряженный с блоком подсветки и объектом фотоприемник, дифференцирующее устройство, между фотоприемником и дифференцирующим устройством включены последовательно соединенные детектор знака производной сигнала и формирователь сигнала положения, причем входдетекгора знака производной соединен с выходом фотопоиемника, выход детектора знака производной соединен с входом преобразователя частота-напряжение и входом формирователя сигнала положения. Выход формирователя сигнала положения соединен со входом дифференцирующего устройства, г ь;ход
преобразователя частота-напряжение является выходом сигнала угловой скорости вращения оОьекта, выход формирователя сигнала положения является выходом сигнала угла прецессии, а выход дифференцирующего устройства является выходом сигнала угловой скорости прецессии объекта, При этом линейный световой поток задает плоскость начального отсчета угла
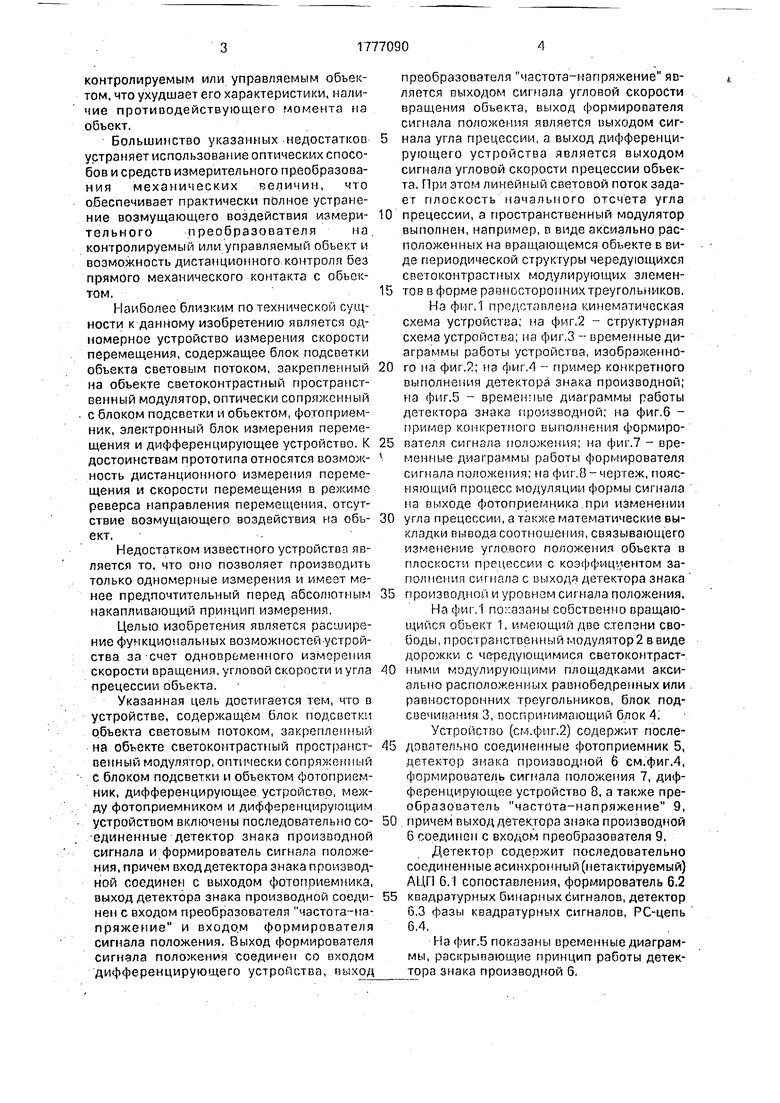
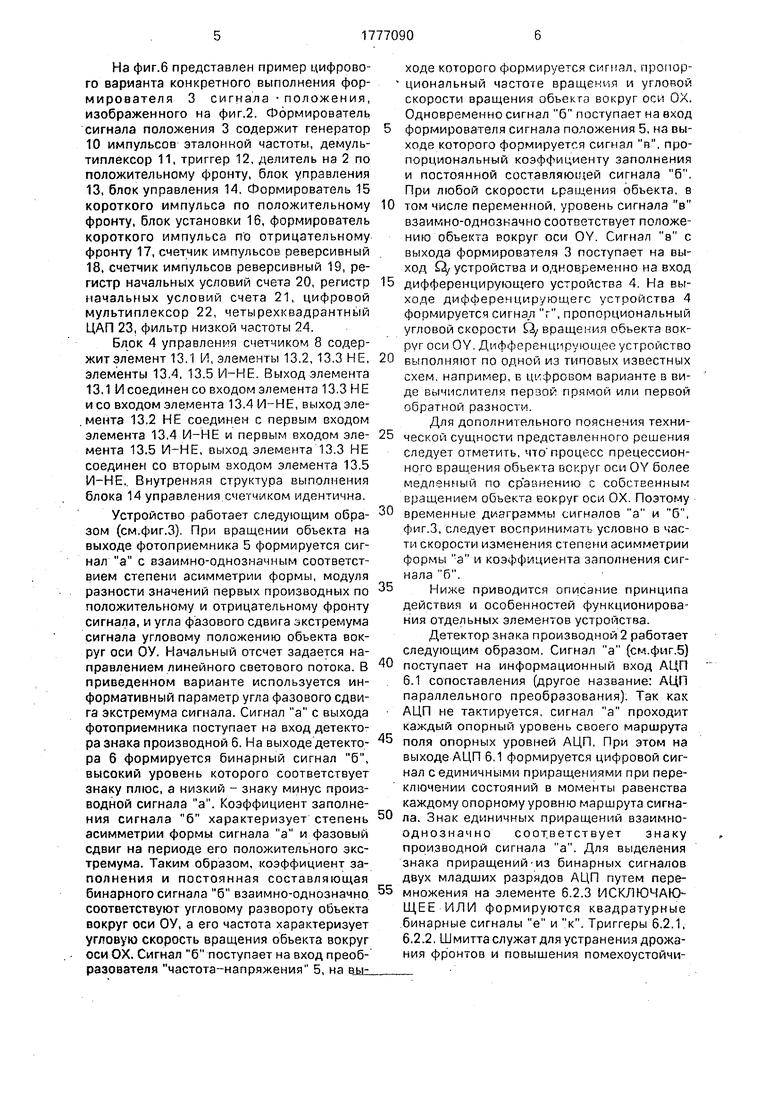
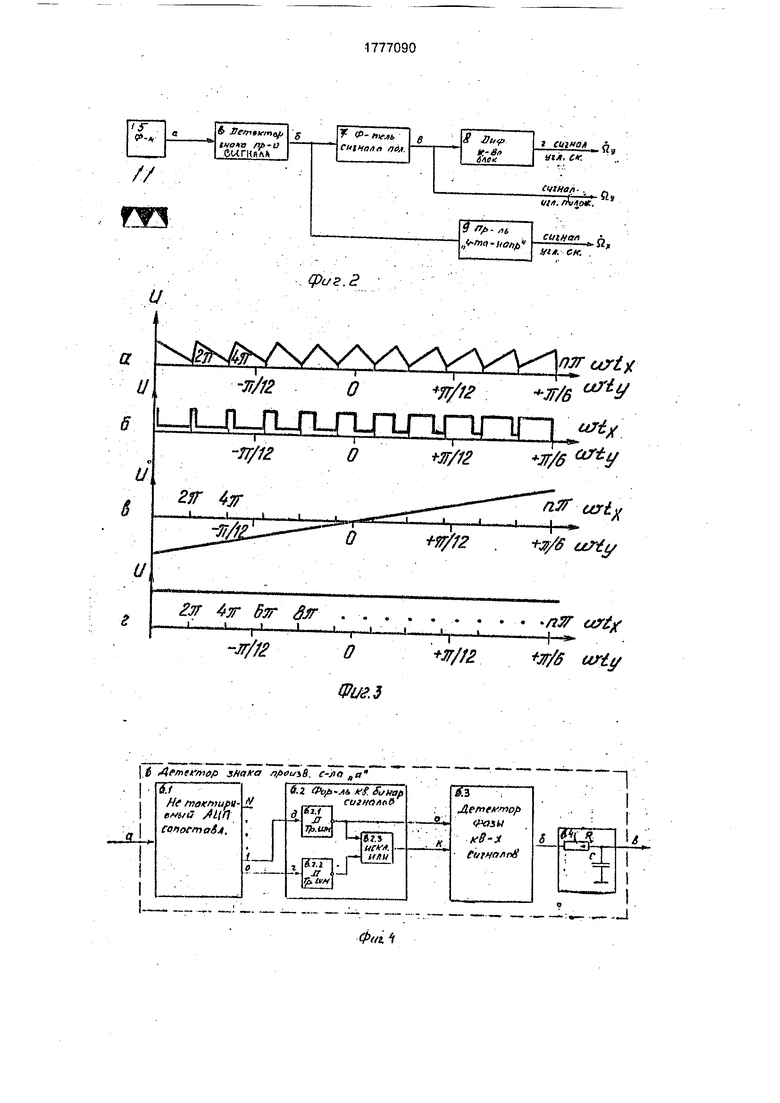
0 прецессии, а пространственный модулятор выполнен, например, п виде аксиально расположенных на вращающемся объекте в виде периодической структуры чередующихся свегоконтрастных модулирующих элемен5 гов в форме равиосторопнихтреугольников. На фпг,1 представлена кинематическая схема устройства, на фиг.2 - структурная схема устройства; на фиг.З - временные диаграммы работы устройства, иэображенпо0 го на фиг.2; из фиг.4 - пример конкретного выполнения детектора знака производной; на фиг.5 - времен-ibie диаграммы работы детектора знака производной; па фиг.б - пример конкретного выполнения формиро5 вателя сигнала положения; на фиг.7 - временные диаграммы работы формирователя сигнала положения; на фш.8-чертеж, поясняющий процесс модуляции формы сигнала на выходе фотоприемника при изменении
0 угла прецессии, а также математ ические выкладки вывода соотношения, связывающего изменение углового положения объекта в плоскости прецессии с коэффициентом заполнения сигнала с выходя детектора знака
5 производном и уровном CHI нала положения. На фиг, i по азаны собственно вращающийся объект 1, имеющий две степзни свободы, пространственный модулятор2 в виде дорожки с чередующимися светоконтраст0 ными модулирующими площадками аксиально расположенных равнобедренных или равносторонних треугольников, блок под- соечивония 3, воспринимающий блок 4. Устройство (см.фпг.2) содержит после5 довательио соединенные фотоприемник 5, цегектор знака производной 6 см.фиг.4, формирователь сигнала положения 7, дифференцирующее устройство 8, а также преобразователь частота-напряжение 9,
0 причем выход детектора знака производной 6 соединен с входом преобразователя 9.
Детектор содеожит последовательно соединенные асинхронный (не тактируемый) АЦП 6. сопоставления, формирователь 6.2
5 квадратурных бинарных сигналов, детектор 6.3 фазы квадратурных сигналов, РС-цепь 6,4.
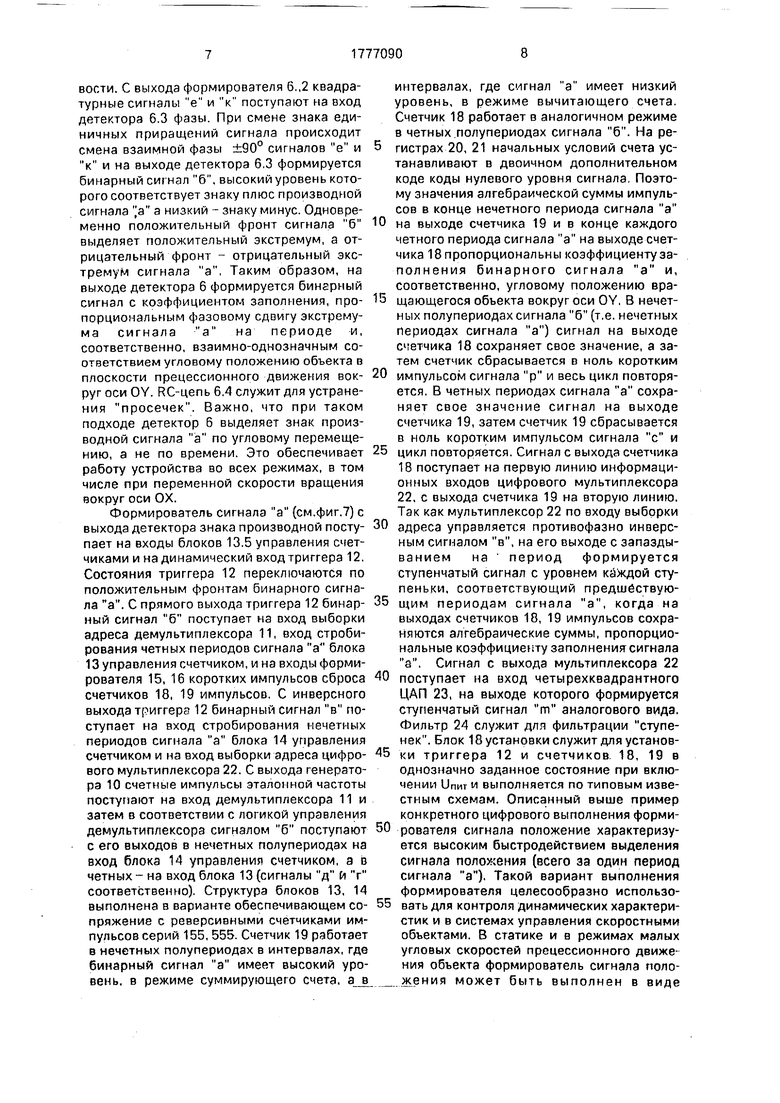
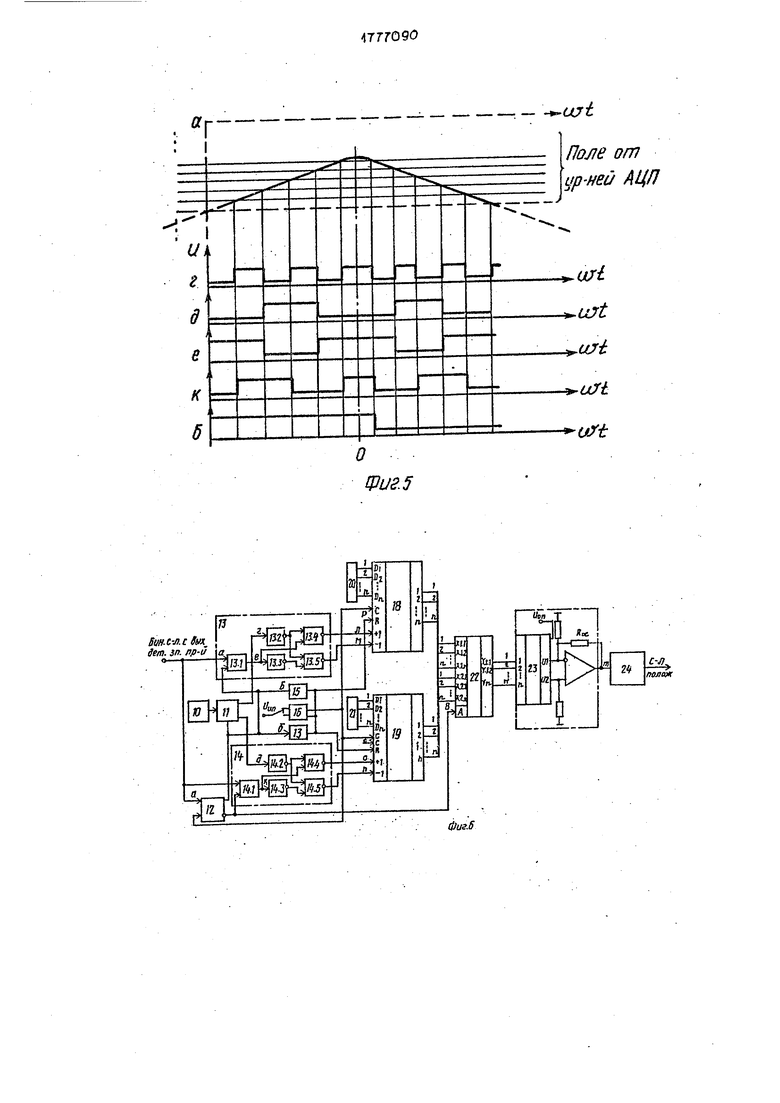
На фиг,5 показаны временные диаграммы, раскрывающие принцип работы детектора знака производной 6,
На фиг.6 представлен пример цифрового варианта конкретного выполнения формирователя 3 сигнала -положения, изображенного на фиг.2. Формирователь сигнала положения 3 содержит генератор 10 импульсов эталонной частоты, демуль- типлексор 11, триггер 12, делитель на 2 по положительному фронту, блок управления 13, блок управления 14, Формирователь 15 короткого импульса по положительному фронту, блок установки 16, формирователь короткого импульса по отрицательному фронту 17, счетчик импульсов реверсивный 18. счетчик импульсов реверсивный 19, регистр начальных условий счета 20, регистр начальных условий счета 21, цифровой мультиплексор 22, четырехквадрантный ЦАП 23, фильтр низкой частоты 24.
Блок 4 управления счетчиком 8 содержит элемент 13.1 И, элементы 13.2, 13.3 НЕ, элементы 13.4, 13.5 И-НЕ. Выход элемента 13.1 I/I соединен со входом элемента 13.3 НЕ и со входом элемента 13.4 И-НЕ, выход зле- . мента 13.2 НЕ соединен с первым входом элемента 13,4 И-НЕ и первым входом элемента 13.5 И-НЕ, выход элемента 13.3 НЕ соединен со вторым входом элемента 13.5 И-НЕ. Внутренняя структура выполнения блока 14 управления сметчиком идентична.
Устройство работает следующим образом (см.фиг.3). При вращении объекта на выходе фотоприемника 5 формируется сигнал а с взаимно-однозначным соответствием степени асимметрии формы, модуля разности значений первых производных по положительному и отрицательному фронту сигнала, и угла фазового сдвига экстремума сигнала угловому положению объекта вокруг оси ОУ. Начальный отсчет задается направлением линейного светового потока. В приведенном варианте используется информативный параметр угла фазового сдвига экстремума сигнала. Сигнал а с выхода фотоприемника поступает на вход детектора знака производной 6. На выходе детектора 6 формируется бинарный сигнал б, высокий уровень которого соответствует знаку плюс, а низкий - знаку минус производной сигнала а. Коэффициент заполнения сигнала б характеризует степень асимметрии формы сигнала а и фазовый сдвиг на периоде его положительного экстремума. Таким образом, коэффициент заполнения и постоянная составляющая бинарного сигнала б взаимно-однозначно соответствуют угловому развороту объекта вокруг оси ОУ, а его частота характеризует угловую скорость вращения объекта вокруг оси ОХ. Сигнал б поступает на вход преобразователя частота-напряжения 5, на вы-..
ходе которого формируется сигнал, пропор- циональный частоте вращения и угловой скорости вращения объекта вокруг оси ОХ. Одновременно сигнал б поступает на вход 5 формирователя сигнала положения 5, на выходе которого формируется сигнал в, пропорциональный коэффициенту заполнения и постоянной составляющей сигнала б. При любой скорости ьращения объекта, в
0 том числе переменной, уровень сигнала в взаимно-однозначно соответствует положению объекта вокруг оси OY. Сигнал в с выхода формирователя 3 поступает на выход Обустройства и одновременно на вход
5 дифференцирующего устройства 4. На выходе дифференцирующего устройства 4 формируется сигнал г, пропорциональный угловой скорости Q/ вращения объекта вок- руг оси OY. Дифференцирующее устройство
0 выполняют по одной из типовых известных схем, например, Б цифровом варианте в виде вычислителя первой прямой или первой обратной разности.
Для дополнительного пояснения техни5 ческой сущности представленного решения следует отметить, что процесс прецессионного вращения объекта вокруг оси OY более медленный по сравнению с собственным вращением объекта вокруг оси ОХ. Поэтому
0 временные диаграммы сигналов а и б, фиг.З, следует воспринимать условно в части скорости изменения степени асимметрии формы а и коэффициента заполнения сигнала б.
5Ниже приводится описание принципа
действия и особенностей функционирования отдельных элементов устройства.
Детектор знака производной 2 работает следующим образом. Сигнал а (см.фиг.5)
0 поступает на информационный вход АЦП
6.1 сопоставления (другое название: АЦП
параллельного преобразования). Так как
АЦП не тактируется, сигнал а проходит
каждый опорный уровень своего маршрута
5 поля опорных уровней АЦП. При этом на выходе АЦП 6.1 формируется цифровой сигнал с единичными приращениями при переключении состояний в моменты равенства каждому опорному уровню маршрута сигна0 ла. Знак единичных приращений взаимнооднозначно соответствует знаку производной сигнала а. Для выделения знака приращений-из бинарных сигналов двух младших разрядов АЦП путем пере5 множения на элементе 6.2.3 ИСКЛЮЧАЮЩЕЕ ИЛИ формируются квадратурные бинарные сигналы е и к. Триггеры 6.2.1, 6.2.2. Шмитта служат для устранения дрожания фронтов и повышения помехоустойчи
вости. С выхода формирователя 6.,2 квадратурные сигналы е и к поступают на вход детектора 6.3 фазы. При смене знака единичных приращений сигнала происходит смена взаимной фазы ±90° сигналов е и к и на выходе детектора б.З формируется бинарный сиг нал б, высокий уровень которого соответствует знаку плюс производной сигнала а а низкий - знаку минус. Одновременно положительный фронт сигнала б выделяет положительный экстремум, а отрицательный фронт - отрицательный экстремум сигнала а, Таким образом, на выходе детектора 6 формируется бинарный сигнал с коэффициентом заполнения, пропорциональным фазовому сдвигу экстремума сигнала а на периоде и, Соответственно, взаимно-однозначным соответствием угловому положению объекта в плоскости прецессионного движения вокруг оси OY. RC-цепь 6.4 служит для устранения просечек. Важно, что при таком подходе детектор 6 выделяет знак производной сигнала а по угловому перемещению, а не по времени. Это обеспечивает работу устройства во всех режимах, в том числе при переменной скорости вращения вокруг оси ОХ.
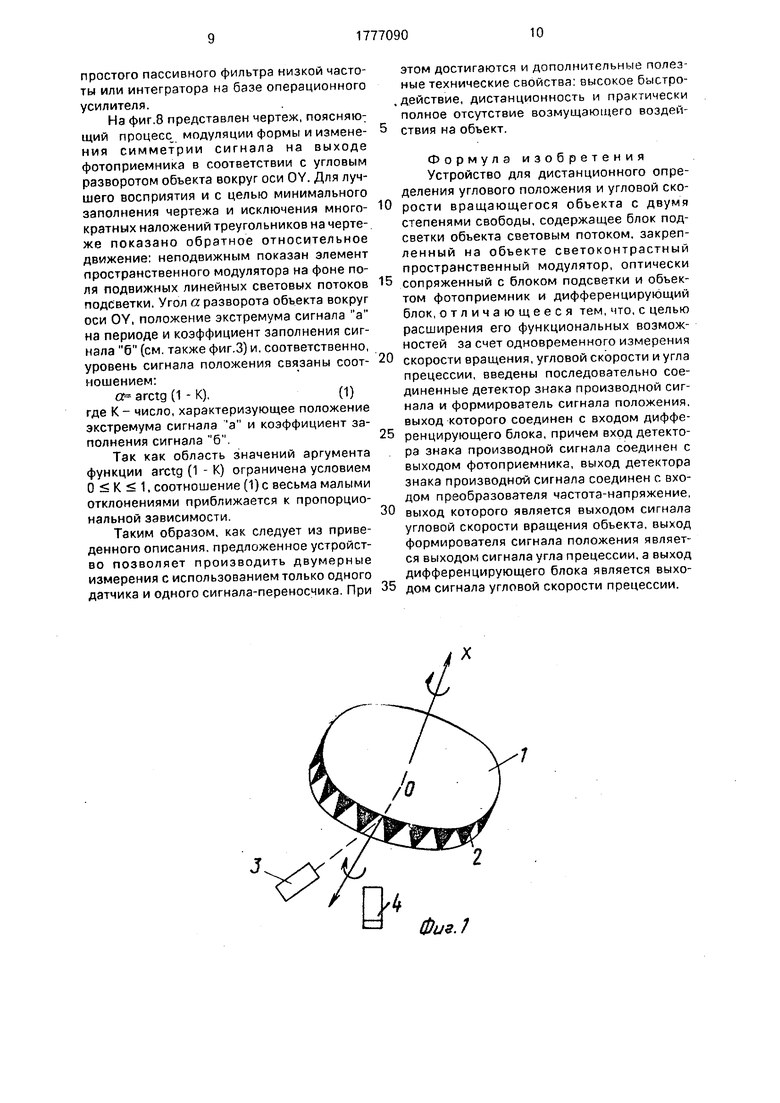
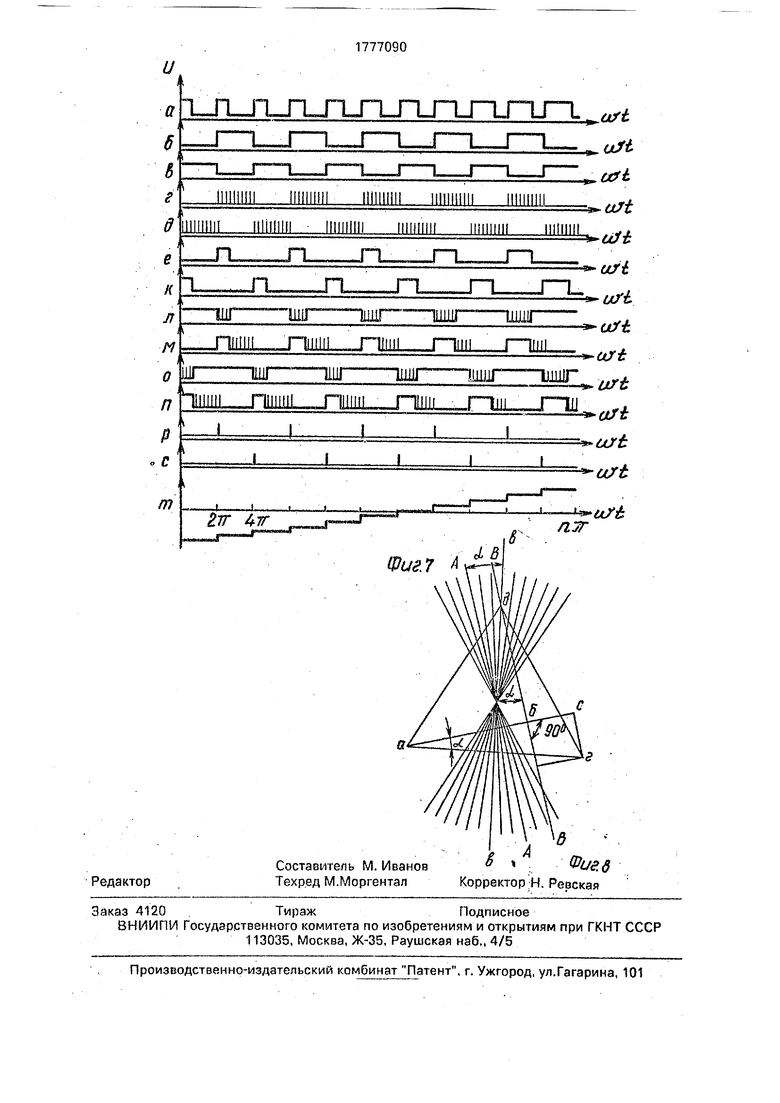
Формирователь сигнала а (см.фиг.7) с выхода детектора знака производной поступает на входы блоков 13.5 управления счетчиками и на динамический вход триггера 12. Состояния триггера 12 переключаются по положительным фронтам бинарного сигнала а. С прямого выхода триггера 12 бинарный сигнал б поступает на вход выборки адреса демультиплексора 11, вход строби- рования четных периодов сигнала а блока 13 управления счетчиком, и на входы формирователя 15, 16 коротких импульсов сброса счетчиков 18, 19 импульсов. С инверсного выхода триггера 12 бинарный сигнал в поступает на вход стробирования нечетных периодов сигнала а блока 14 управления счетчиком и на вход выборки адреса цифре- вого мультиплексора 22. С выхода генератора 10 счетные импульсы эталонной частоты поступают на вход демультиплексора 11 и затем в соответствии с логикой управления демультиплексора сигналом б поступают с его выходов в нечетных полупериодах на вход блока 14 управления счетчиком, а в четных - на вход блока 13 (сигналы д и г соответственно). Структура блоков 13, 14 выполнена в варианте обеспечивающем со- пряжение с реверсивными счетчиками импульсов серий 155, 555. Счетчик 19 работает в нечетных полупериодах в интервалах, где бинарный сигнал а имеет высокий уровень, в режиме суммирующего счета, а в
5
0
0
0 5 0 5
5
0
5
интервалах, где сигнал а имеет низкий уровень, в режиме вычитающего счета. Счетчик 18 работает в аналогичном режиме в четных полупериодах сигнала б. На регистрах 20, 21 начальных условий счета устанавливают в двоичном дополнительном коде коды нулевого уровня сигнала. Поэтому значения алгебраической суммы импульсов в конце нечетного периода сигнала а на выходе счетчика 19 и в конце каждого четного периода сигнала а на выходе счетчика 18 пропорциональны коэффициенту заполнения бинарного сигнала а и, соответственно, угловому положению вращающегося объекта вокруг оси OY. В нечетных полупериодах сигнала б (т.е. нечетных периодах сигнала а) сигнал на выходе счетчика 18 сохраняет свое значение, а затем счетчик сбрасывается в ноль коротким импульсом сигнала р и весь цикл повторяется. В четных периодах сигнала а сохраняет свое значение сигнал на выходе счетчика 19, затем счетчик 19 сбрасывается в ноль коротким импульсом сигнала с и цикл повторяется. Сигнал с выхода счетчика 18 поступает на первую линию информационных входов цифрового мультиплексора 22, с выхода счетчика 19 на вторую линию. Так как мультиплексор 22 по входу выборки адреса управляется противофазно инверсным сигналом в, на его выходе с запаздыванием на период формируется ступенчатый сигнал с уровнем каждой ступеньки, соответствующий предшбствую- щим периодам сигнала а, когда на выходах счетчиков 18, 19 импульсов сохраняются алгебраические суммы, пропорциональные коэффициенту заполнения сигнала а. Сигнал с выхода мультиплексора 22 поступает на вход четырехквадрантного ЦАП 23, на выходе которого формируется ступенчатый сигнал т аналогового вида. Фильтр 24 служит для фильтрации ступенек. Блок 18 установки служит для установки триггера 12 и счетчиков 18, 19 в однозначно заданное состояние при включении Упит и выполняется по типовым известным схемам. Описанный выше пример конкретного цифрового выполнения формирователя сигнала положение характеризуется высоким быстродействием выделения сигнала положения (всего за один период сигнала а). Такой вариант выполнения формирователя целесообразно использовать для контроля динамических характеристик и в системах управления скоростными объектами. В статике и в режимах малых угловых скоростей прецессионного движения объекта формирователь сигнала положения может быть выполнен в виде
простого пассивного фильтра низкой частоты или интегратора на базе операционного усилителя.
На фиг.8 представлен чертеж, поясняю щий процесс модуляции формы и изменения симметрии сигнала на выходе фотоприемника в соответствии с угловым разворотом объекта вокруг оси OY. Для лучшего восприятия и с целью минимального заполнения чертежа и исключения много кратных наложений треугольников на чертеже показано обратное относительное движение: неподвижным показан элемент пространственного модулятора на фоне поля подвижных линейных световых потоков подсветки. Угол а разворота объекта вокруг оси OY, положение экстремума сигнала а на периоде и коэффициент заполнения сигнала б (см. также фиг.З) и, соответственно, уровень сигнала положения связаны соотношением:
а arctg (1 - К),(1)
где К- число, характеризующее положение экстремума сигнала а и коэффициент заполнения сигнала б.
Так как область значений аргумента функции arctg (1 - К) ограничена условием О К 1, соотношение (1) с весьма малыми отклонениями приближается к пропорциональной зависимости.
Таким образом, как следует из приведенного описания, предложенное устройство позволяет производить двумерные измерения с использованием только одного датчика и одного сигнала-переносчика. При
Ю
15
35
20
25
30
этом достигаются и дополнительные полезные технические свойства: высокое быстро- , действие, дистанционность и практически полное отсутствие возмущающего воздействия на объект.
Формула изобретения Устройство для дистанционного определения углового положения и угловой скорости вращающегося объекта с двумя степенями свободы, содержащее блок подсветки объекта световым потоком, закрепленный на объекте светоконтрастный пространственный модулятор, оптически сопряженный с блоком подсветки и объектом фотоприемник и дифференцирующий блок, отличающееся тем, что, с целью расширения его функциональных возможностей за счет одновременного измерения скорости вращения, угловой скорости и угла прецессии, введены последовательно соединенные детектор знака производной сигнала и формирователь сигнала положения, выход которого соединен с входом дифференцирующего блока, причем вход детектора знака производной сигнала соединен с выходом фотоприемника, выход детектора знака производной сигнала соединен с входом преобразователя частота-напряжение, выход которого является выходом сигнала угловой скорости вращения объекта, выход формирователя сигнала положения является выходом сигнала угла прецессии, а выход дифференцирующего блока является выходом сигнала угловой скорости прецессии.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля положения мобильного объекта относительно ориентирующей линии | 1989 |
|
SU1767478A2 |
| Устройство для контроля положения мобильного объекта относительно ориентирующего слоя | 1988 |
|
SU1638708A1 |
| Углоизмерительное устройство | 1979 |
|
SU879301A1 |
| Импульсное углоизмерительное устройство | 1978 |
|
SU769325A1 |
| ПОЛЯРИЗАЦИОННАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ СНАРЯДА ПО СТВОЛУ НАРЕЗНОГО АРТИЛЛЕРИЙСКОГО ОРУДИЯ | 2023 |
|
RU2805642C1 |
| ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ | 1992 |
|
RU2069308C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092788C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА КОМАНДЫ ОДНОКАНАЛЬНЫХ ВРАЩАЮЩИХСЯ РАКЕТ И СНАРЯДОВ С РЕЛЕЙНЫМ РУЛЕВЫМ ПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2574500C2 |
| Анализатор экстремумов | 1980 |
|
SU954932A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВНЕШНЕБАЛЛИСТИЧЕСКИХ ПАРАМЕТРОВ МЕТАТЕЛЬНОГО ЭЛЕМЕНТА С ПОМОЩЬЮ ФОТОЛИНЕЕК И СВЕТОВЫХ ЭКРАНОВ | 2005 |
|
RU2278388C1 |
Изобретение относится к технике дистанционного измерения углового положения и угловой скорости объектов с использованием оптических средств. Целью изобретения является расширение функциональных возможностей устройства за счет одновременного измерения скорости враИзобретение относится к измерению углового положения и угловой скорости объектов с использованием оптических средств первичного измерительного преобразования и касается устройства для дистанционного определения углового положения и угловой скорости вращающегося объекта с двумя степенями свободы. Изобретение может быть использовано в системах пространственного спежения, стабилизации, наведения, в системах контроля для определения характеристик гироскопов, гироскопических систем и других вращающихся объектов. щения, скорости и угла прецессии объектов с двумя степенями свободы. Указанная цель достигается тем, что в устройстве, содержащем блок подсветки объекта, закрепленный на объект светоконтрастный пространственный модулятор, оптически сопряженный с блоком подсветки и объектом, фотоприемник и дифференцирующий блок, между фотоприемником и дифференцирующим блоком последова.тельно включены детектор знака производной сигнала и формирователь сигнала положения. Причем вход детектора знака производной сигнала соединен с входом преобразователя частота- напряжение, выход которого соединен с входом дифференцирующего устройства. Кроме того выход детектора диска производной соединен с входом преобразования частота-напряжение, выход которого является выходом сигнала угловой скорости вращения объекта, выход формирователя сигнала положения - выходом сигнала угла прецессии, а выход дифференцирующего блока - выходом сигнала угловой скорости прецессии. 8 ил. Известны двумерные ферррдинамиче- ские, электродинамические, трансформаторные и индуктивные измерительные преобразователи, основанные на использовании физического явления электромагнитного взаимодействия неподвижного и подвижного элементов с обмотками. К достоинствам этих устройств относится то, что все они являются абсолютными датчиками. Недостатками известных преобразователей является невысокая точность и быстродействие, существенная динамическая погрешность измерения, обусловленная наличием переходного процесса, необходк мость механического соединения с (Л С ч ч | о о о
Фиэ.1
фиг.2
-JT//2
О+Я//2+Ж/6 urit/
Фиг. 5
neatrw
}&)
I n-du -at -wag Щ iv-rwig
swoj
05Q21M
a IJ l-Jl lJnjnjn
пинии пинии
п
т
П
П
--шг
W
ШГ
иииг
тши
Ш
П нт Они глин глин..,,.
ШГ
ТШГ
1ШГ
п
пиши.. П ни|1 П ПШи РТИ ГТ1
4т
Јтг 4тг
Редактор
Составитель М. Иванов Техред М.Моргентал
urt
--(jjt
пинии
мнит
ГТ
T
ГТ.
иииг
тши
rtft
ufi
uft
uf-Ь
-л/
Т1Ш
ШШГ
1Ш1Г
«г
X
1
пзг
ufЈ
Фиг.7
В Фие.д
Корректор Н. Ревская
| Карпов Е.М | |||
| Измерительные преобразователи с двумя степенями свободы, М.: Энергия, 1972, с | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| Авторское свидетельство СССР, № 1228018, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
