Известные устройства для измерения и регистрации угла устойчивости синхронной машины содержат симметричный триггер, имиульсный датчик фазы э. д. с. машины и регистрируюший орган.
Предлол енное устройство отличается от известных тем, что в нем иснользован транзисторный усилитель, управляюш,ий через базовый переход выходным сигналом триггера, фиксируюш,им положение поля ротора. Коллекторная цепь усилителя питается синусоидальным напряжением сети, фиксируюш.им положение ноля статора. С выхода усилителя снимается сигнал, пропорциональный углу устойчивости машины.
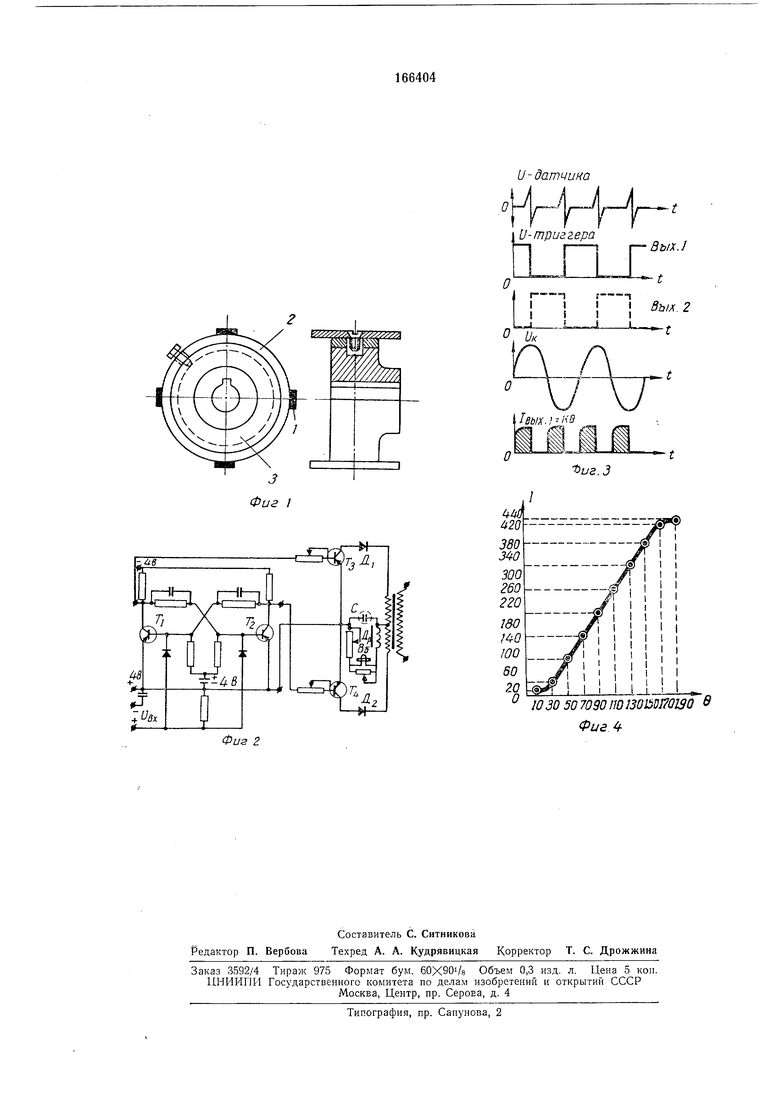
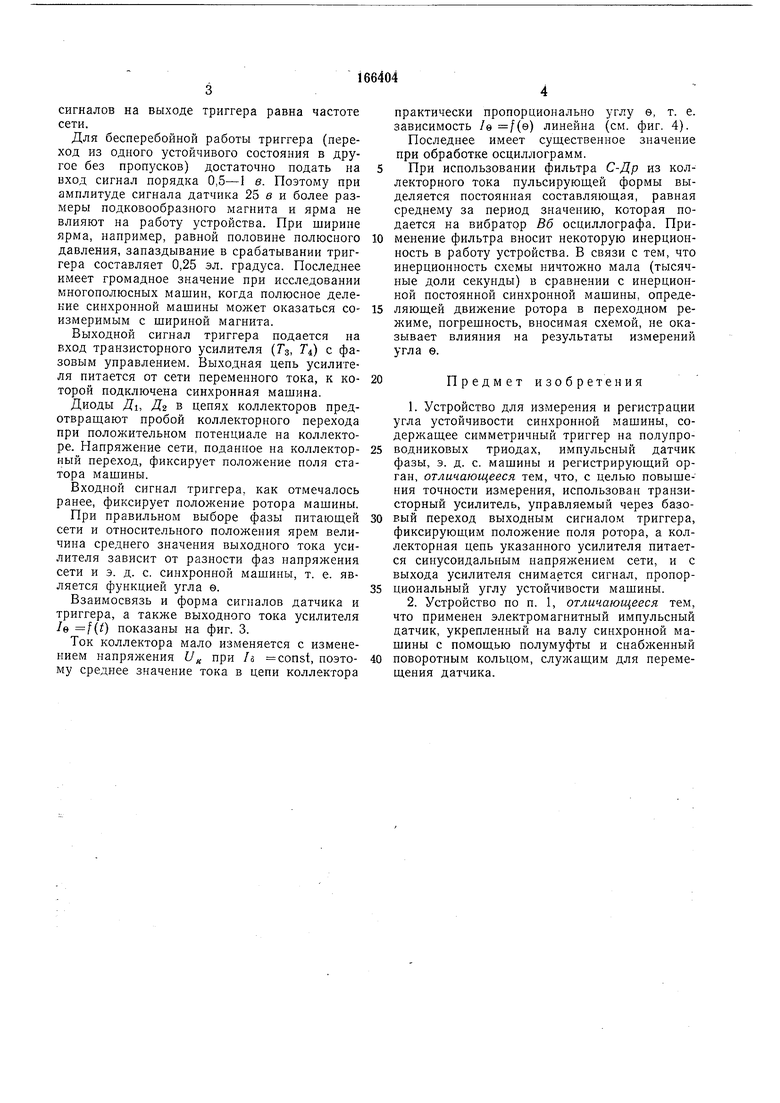
На фиг. 1 показано крепление ярем датчика на полумуфте синхронной машины; на фиг. 2 - принципиальная электрическая схема предложенного устройства; на фиг. 3 - кривые входных и выходных электрических величин устройства; на фиг. 4 - кривая зависимости выходного сигнала устройства от угла устойчивости синхронной машины.
В основу бесконтактного метода измерения угла с помощью нового устройства положено сочетание свойств триггера, управляющего датчиком электромагпитной системы синхронно с сетью, и транзисторного усилителя с фазовым управлением, у которого напряжение выходной цепи (U ) изменяется по синусоидальному закону.
В качестве датчика импульсов использован известный датчик электромагнитной системы, который осуществляет фиксацию полол ения ротора синхронной машины относительно ноля статора. Зазор между постоянным магнитом и ярмом равен 0,3-0,5 мм.
Число ярем (пластин), размещенных по окружности полумуфты на валу синхронной машины, должно быть равно числу нолюсов машины. Расстояние между ярмами должно быть равно расстоянию полюсного деления
машины.
Для установки ярем / в ноложение, отвечающее нулевому значению угла е, а также для ностроения градуировочной кривой /в /(0) ярма крепят на подвижном кольце 2,
которое можно поворачивать и закреплять в любом положении относительно полумуфты 3.
Существующие конструкции предусматривают поворот магнитов, что связано со значительными технологическими трудностями изготовления дуги с пазом для закрепления магнита.
сигналов на выходе триггера равна частоте сети.
Для бесперебойной работы триггера (переход из одного устойчивого состояния в другое без пропусков) достаточно подать на вход сигнал порядка 0,5-1 в. Поэтому при амплитуде сигнала датчика 25 в и более размеры подковообразного магнита и ярма не влияют на работу устройства. При ширине ярма, например, равной половине полюсного давления, запаздывание в срабатывании триггера составляет 0,25 эл. градуса. Последнее имеет громадное значение при исследовании многополюсных машин, когда полюсное деление синхронной машины может оказаться соизмеримым с шириной магнита.
Выходной сигнал триггера подается на вход транзисторного усилителя (Тз, с фазовым управлением. Выходная цепь усилителя питается от сети переменного тока, к которой подключена синхронная машина.
Диоды Дь Д2 в цепях коллекторов предотвращают пробой коллекторного перехода при положительном потенциале на коллекторе. Напряжение сети, поданное на коллекторный переход, фиксирует пололсение поля статора машины.
Входной сигнал триггера, как отмечалось ранее, фиксирует положение ротора машины.
При правильном выборе фазы питающей сети и относительного положения ярем величина среднего значения выходного тока усилителя зависит от разности фаз напряжения сети и э. д. с. синхронной машины, т. е. является функцией угла е.
Взаимосвязь и форма сигналов датчика и триггера, а также выходного тока усилителя /в /(0 показаны на фиг. 3.
Ток коллектора мало изменяется с изменением напряжения U при Га const, поэтому среднее значение тока в цепи коллектора
практически пропорционально углу в, т. е. зависимость /в /(в) линейна (см. фиг. 4).
Последнее имеет существенное значение при обработке осциллограмм.
При использовании фильтра С-Др из коллекторного тока нульсирующей формы выделяется постоянная составляющая, равная среднему за период значению, которая подается на вибратор Вб осциллографа. Применение фильтра вносит некоторую инерционность в работу устройства. В связи с тем, что инерционность схемы ничтожно мала (тысячные доли секунды) в сравнении с инерционной постоянной синхронной машины, определяющей движение ротора в переходном режиме, погрешность, вносимая схемой, не оказывает влияния на результаты измерений угла в.
Предмет изобретения
1.Устройство для измерения и регистрации угла устойчивости синхронной машины, содержащее симметричный триггер на полупроводниковых триодах, импульсный датчик фазы, э. д. с. машины и регистрирующий орган, отличающееся тем, что, с целью повышения точности измерения, использован транзисторный усилитель, управляемый через базовый переход выходным сигналом триггера, фиксирующим положение поля ротора, а коллекторная цень указанного усилителя питается синусоидальным напряжением сети, и с выхода усилителя снимается сигнал, пропорциональный углу устойчивости машины.
2.Устройство по п. 1, отличающееся тем, что применен электромагнитный импульсный датчик, укрепленный на валу синхронной машины с помощью полумуфты и снабженный
поворотным кольцом, служащим для перемещения датчика.
и - даггтино (J
и-триггера
uz.3
Ю 30 50 7090 no Фие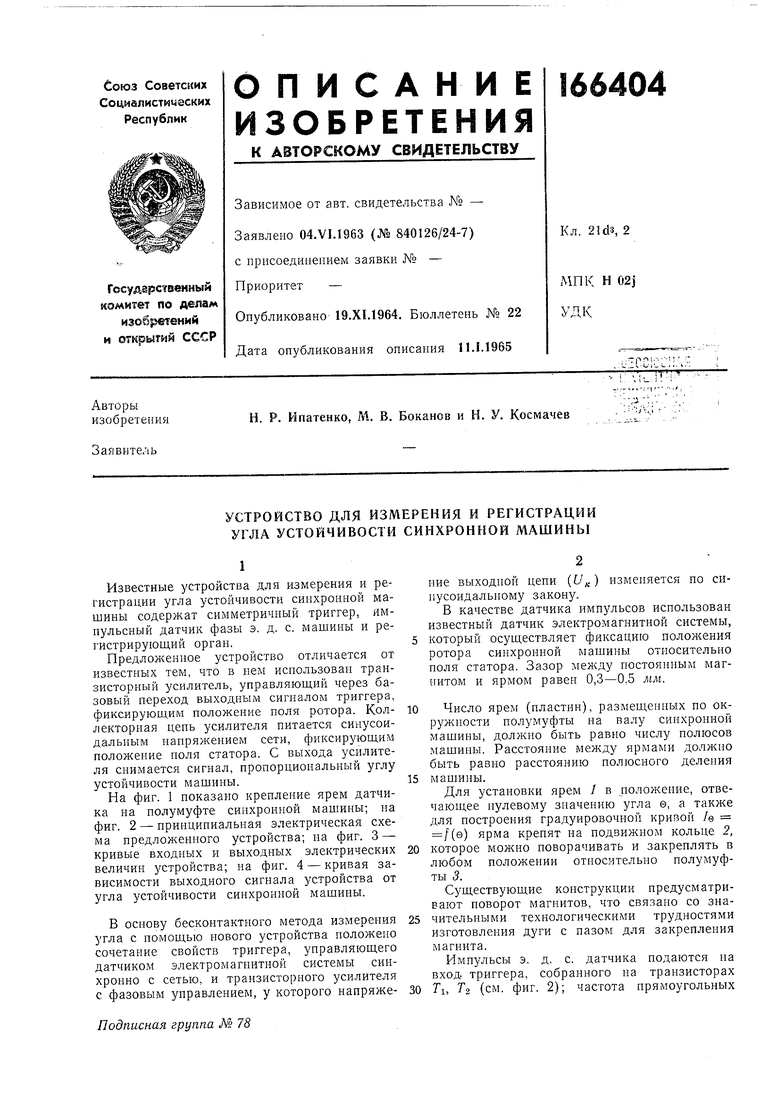
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ИЗМЕРЕНИЯ И РЕГИСТРАЦИИ УГЛА УСТОЙЧИВОСТИ СИНХРОННОЙ МАШИНЫ | 1969 |
|
SU244497A1 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ ДВОЙНОГО ПИТАНИЯ | 1971 |
|
SU320004A1 |
| Автоматический регулятор возбуждения для синхронных машин | 1978 |
|
SU782120A1 |
| СИСТЕМА ВОЗДУШНОГО ОХЛАЖДЕНИЯ БЛОКОВ ПУСКОТОРМОЗНЫХ РЕЗИСТОРОВ | 2010 |
|
RU2465152C2 |
| Реверсивный вентильный электродвигатель | 1977 |
|
SU744861A1 |
| ЭЛЕКТРОННО-КОММУТИРУЕМЫЙ СИНХРОННЫЙ РЕАКТИВНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1995 |
|
RU2198459C2 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1030929A1 |
| ОПРЕДЕЛЕНИЕ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2009 |
|
RU2528948C2 |
| УСТРОЙСТВО для ВОЗБУЖДЕНИЯ СЙНХРОННбЙ МАШИНЫ | 1969 |
|
SU247383A1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ | 2012 |
|
RU2510877C1 |