1
(21)4651170/11 (22)12.01.89 (46)23.07.91. Бюл. №27
(71)Саратовский институт механизации сельское хозяйства им,М.И.Калинина
(72)П.П.Г амаюнов, О.А.Белов, И.В.Савенков и А.М.Федотов (53)681.2,629.1.041(088.8)
(56)Патент США № 4647053, кл. В 62 D 37/00, 1987.
(54) УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА
(57)Изобретение относится к транспортным средствам с подвижным в поперечном направлении кузовом. Цель изобретения - расширение эксплуатационных возможностей путем обеспеиения вгзможностл использования поворота кузова для его разгрузки. На кузове 2 транспортного средства перем ещаемом в поперечном направлении относительно рамы по дуговым направляющим с помощью гидравлической следящей системы, отслеживающей величину вектора горизонтальной (по отношению к кузову) составляющей силы веса или силы инерции, укреплен центробежный датчик 17 этого вектора силы с помощью зажимного винт 22 О слабив винт22 и воздействуя корпус датчика рычагом тягой ручного управления разгрузкой 24 поворачивают датчик 17 вручную на некоторый угол к госчзонту, отчего следящая гидросистема разворачивает кузов на такой же угол упрощая тем процесс разгрузки кузова 2 з г, ф-лы, 5 ил
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОПЕРЕЧНОЙ СТАБИЛИЗАЦИИ КУЗОВА САМОСВАЛЬНОГО ТРАНСПОРТНОГО СРЕДСТВА ПРИ ЗАДНЕЙ РАЗГРУЗКЕ | 2017 |
|
RU2679758C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2519304C1 |
| Самосвальное транспортное средство для перевозки бетонной смеси | 1986 |
|
SU1395533A1 |
| Система рулевого управления колесного транспортного средства | 1985 |
|
SU1273286A1 |
| НАВЕСНАЯ САМОСВАЛЬНАЯ ПЛАТФОРМА | 1970 |
|
SU264174A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ АГРЕГАТ | 1994 |
|
RU2091999C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО СО СМЕННЫМ КУЗОВОМ ДЛЯ ПЕРЕВОЗКИ НАСЫПНЫХ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ГРУЗОВ МАЛОЙ ПЛОТНОСТИ | 2011 |
|
RU2481998C1 |
| Тракторная тележка для транспортировки грузов по склонам | 1983 |
|
SU1156928A1 |
| Рулевой привод транспортного средства с двумя управляемыми мостами | 1983 |
|
SU1126482A1 |
| Устройство связи транспортного средства с почвообрабатывающим орудием | 1990 |
|
SU1752213A1 |

Изобретение относится к транспортным средствам с подвижным в поперечном направлении кузовом. Цель изобретения - расширение эксплуатационных возможностей путем обеспечения возможности использования поворота кузова для его разгрузки. На кузове 2 транспортного средства, перемещаемом в поперечном направлении относительно рамы по дуговым направляющим с помощью гидравлической следящей системы, отслеживающей величину вектора горизонтальной (по отношению к кузову) составляющей силы веса или силы инерции, укреплен центробежный датчик 17 этого вектора силы с помощью зажимного винта 22. Ослабив винт 22 и воздействуя на корпус датчика рычагом 23 и тягой ручного управления разгрузкой 24, поворачивают датчик 17 вручную на некоторый угол к горизонту, отчего следящая гидросистема разворачивает кузов на такой же угол, упрощая тем процесс разгрузки кузова. 2 з.п.ф-лы. 5 ил.
v
ФигЬ
Изобретение относится к транспортным средствам с подвижным в поперечном направлении кузовом.
Цель изобретения - расширение эсплу- атационных возможностей путем обеспече- ния возможности использования поворота кузова для его разгрузки.
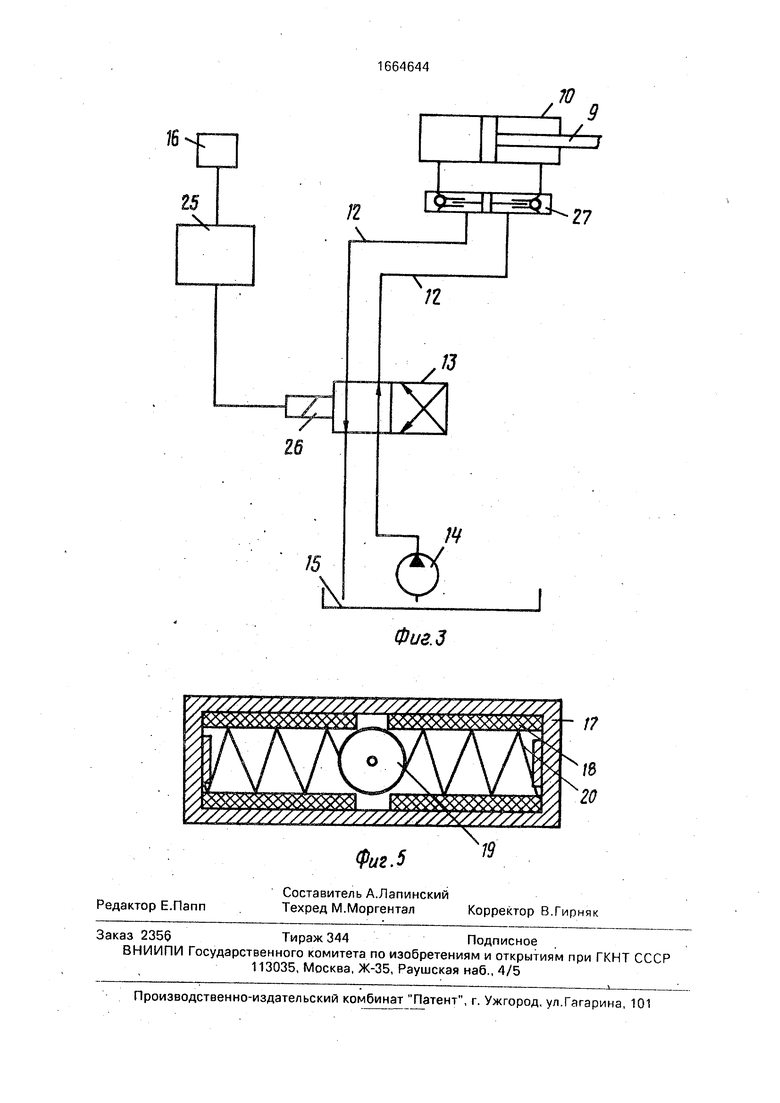
На фиг, 1 представлено транспортное средство, вид сбоку; на фиг. 2 - разрез А-А на фиг. 1; на фиг, 3 - принципиальная схема включения и выключения силового гидроцилиндра; на фиг. 4 - узел крепления центробежного датчика к кузову; на фиг, 5 - устройство центробежного датчика.
Устройство состоит из рамы 1, кузова 2, установленного на роликах 3, расположенных в дугообразных направляющих 4 рамы 1. Ролики 3 связаны с помощью кронштейнов 5 с кузовом 2. Кузов 2 транспортного средства в средней части серьгой 6 шарнир- но связан с одним плечом телескопического двуплечего рычага 7, ось 8 вращения кото-- рогозакреплена в середине рамы 1. С другим плечом рычага 7 шарнирно связан шток 9 силового гидроцилиндра 10, закреплен- ный к раме 1 шарнирно с помощью кронш- . те и на 11 и гидрошлангами 12 соединенный с двухпозиционным электро- уггравляемым гидрораспределителем 13 (фиг. 3), масляным насосом 14 и гидробаком 15. В цепь автоматического управления гидрораспределителем 13 включен центробежный датчик 16. Датчик 16 состоит из корпуса 17 (фиг. 5), потенциометра 18, подвижного грузика 19, связанного с корпусом датчика 17 пружинами 20. Корпус 17 центробежного датчика 16 крепится к кронштейну 21 (фиг, 4), жестко связанному с кузовом 2 в средней его части с помощью зажимного винта 22. Корпус 17 центробежного датчика 16 связан через рычаг 23 с тягой 24 ручного управления разгрузкой. Кроме центробежного датчика 16 в цепь автоматического управления гидрораспределителем 13 входят усилитель 25 мощности (фиг. 3) и электромагнит 26. На гидроцилиндре 10 имеются запорные клапаны 27.
Устройство работает следующим образом.
При движении транспортного средства по прямолинейной траектории на горизонтальной поверхности отсутствуют боковые силы и на грузик 19 горизонтально расположенного центробежного датчика 16 деиствует только сила веса, удерживающая грузик 19 в нейтральном положении, отчего центробежный датчик 16 не подает сигнал и золотник гидрораспределителя 18также.на- ходится в нейтральном положении.
При движении транспортного средства по криволинейной траектории возникает центробежная сила, создающая боковой опрокидывающий момент кузова, действующая на кузов 2 и на грузик 19 центробежного датчика 16, смещая его по направлению действия центробежной силы. Грузик 19, перемещаясь, замыкает обмотку потенциометра 18 и подает электрический сигнал через усилитель 25 (фиг, 3) на электромагнит 26, сердечник которого связан с золотником гидрораспределителя 13. При этом поток масла, подаваемый из гидробака 15 масляным насосом 14 через гидрораспределитель 13, направляется в полость нагнетания силового гидроцилиндра 10, одновременно из второй полости гидроцилиндра 10 масло через гидрораспределитель 13 сливается в гидробак 15.
Шток 9 (фиг. 2) гидроцилиндра 10, перемещаясь по направлению действия центробежной силы, воздействует через двуплечий телескопический рычаг7 на кузов 2, перемещая его на роликах 3 по дугообразным направляющим 4 в сторону, противоположную направлению действия центробежной силы и уменьшая тем самым опрокидывающий момент. Одновременно корпус 17 центробежного датчика 16 наклоняется вместе с кузовом 2 и грузик 19 центробежного датчика возвращается к нейтральному положению, прекращая тем самым подачу масла в полость нагнетания силового гидроцилиндра 10. Это произойдет когда опрокидывающий момент на кузов 2 станет равным нулю и тогда датчик 16 перестанет подавать сигнал, отключая тем самым электромагнит 26, отчего золотник гидрораспределителя 18 возвращается в нейтральное положение и обе полости силового гидроцилиндра 10 запираются с помощью запорных клапанов 27.
Аналогично действует система стабилизации и тогда, когда транспортное средство движется по боковому склону.
Для осуществления разгрузки водитель должен отвернуть зажимной винт 22, ослабив тем самым крепление корпуса 17 датчика 16 относительно кузова 2, и, воздействуя через тягу 24 и рычаг 23 на корпус 17 датчика 16, должен повернуть его в положение I, отчего кузов 2 поворачивается в лротивопо- ложную сторону и происходит разгрузка,
После выгрузки, возвращая тягу 24 и датчик 16 в положение II, водитель добивается того, чтобы кузов 2 принял горизонтальное положение, затем переводит тягу 24 в нейтральное положение и фиксирует корпус 17 датчика 16 на кузове 2 зажимным винтом 22.
Формула изобретения 1. Устройство для стабилизации положения кузова транспортного средства, содержащее дугообразные направляющие, закрепленные на раме транспортного сред- ства поперек продольной оси последнего, ролики, установленные на направляющих и закрепленные посредством кронштейнов на кузове транспортного средства для обеспечения возможности углового поворота ку- зова, механизм перемещения кузова и датчик дестабилизирующих сил кузова, связанный с механизмом перемещения кузова, отличающееся тем, что, с целью расширения эксплуатационных возможно- стей путем обеспечения возможности использования поворота кузова для его разрузки, датчик дестабилизирующих сил кузова выполнен в виде элемента, заключенного в корпусе, закрепленном в средней
/
части днища кузова посредством кронштейна и зажимного винта, и снабжен рычагом и тягой ручного управления его положением относительно горизонтали.
9
-3 4
Фиг.1
А-А
. Фиг 2
(Ч
к О
Фие.З
it
20
