( ШАГАЮЩАЯ ОПОРА ТРАНСПОРТНОГО
1
Изобретение относится к созданию и исследованию адаптивных шагающих машин, в частности к их опорам.
Известна опора шагающей машины, содержащая корпус двухстепенного шарнира, поворотно установленный на вертикальной оси paMjji транспортного средства, голень, соединенную горизонтальным шарниром с нижним концом бедра, имеющего на верхнем конце жестко прикрепленный к нему горизонтальный вал, который поворотно установлен в корпусе двухстепенного шарнира и соединен с приводом поворота бедра, и привод поворота голени, соединенный с ней гибкой передачей, ведущий элемент которой установлен соосно с валом бедра, а ведомый расположен соосно с шарниром голени и жестко соединен с последней, причем привод поворота голени установлен на корпусе двухстепенного шарнираГ11
Недостатком этой опоры является зависимость угла между бедроми гоСРЕДСТВА
ленью от движения бедра, что часто требует корректирующей работы привода голени, т.е. расширения его скоростных характеристик.
Наиболее близкой к предлагаемой опоре является шагающая опора, содержащая корпус двухстепенного шарнира, поворотно устаноапениый на вертикальной оси рамы транспортного средства, шарнирно прикрепленное к корпусу бедро и шарнирно соединенную с ним голень, ось которой посредством механической передачи связана с выходным звеном дифференциальной передачи, два других звена которой через согласующие редукторы связаны один с установленным на корпусе приводом поворота бедра, а другой - с приводом 1голе ни 12.
Звенья такой опоры движутся независ11мо друг от друга, что позволяет либо уменьшить требования к скоростному диапазону привода голени, либо при том же самом диапазоне повысить скорость движения голени и соответственно шагающей машины. Однако дальнейшее увеличение скорости шагающей машины и улучшение ее проходимости, требующей увеличения скорости noBopoia голени, возможны лишь за счет повышения скорости вращения ее привода, что труднодостижимо.
Цель изобретения - повышение проходимости и скорости транспортного средства без изменения характеристик привода поворота голени.
Цель достигается тем, что звено ди(| ференциальной передачи, связанное с приводом поворота бедра, снабжено управляемым тормозом, а между этим звеном и приводом установлена сцепная муфта.
Такое выполнение опоры дает возможность за счет отключения сцепной муфты и торможения указанного звена дифференциальное передачи создавать и определенные моменты (например, когда по условиям движений требуется поднимать бедро вверх и сближать голень с бедром или опускать бедро и увеличивать угол между звеньями опоры) зависимость между движением бедра и голени и тей самым повышать скорость движения голени относительно бедра без увеличения скоростного диапазона ее привода.
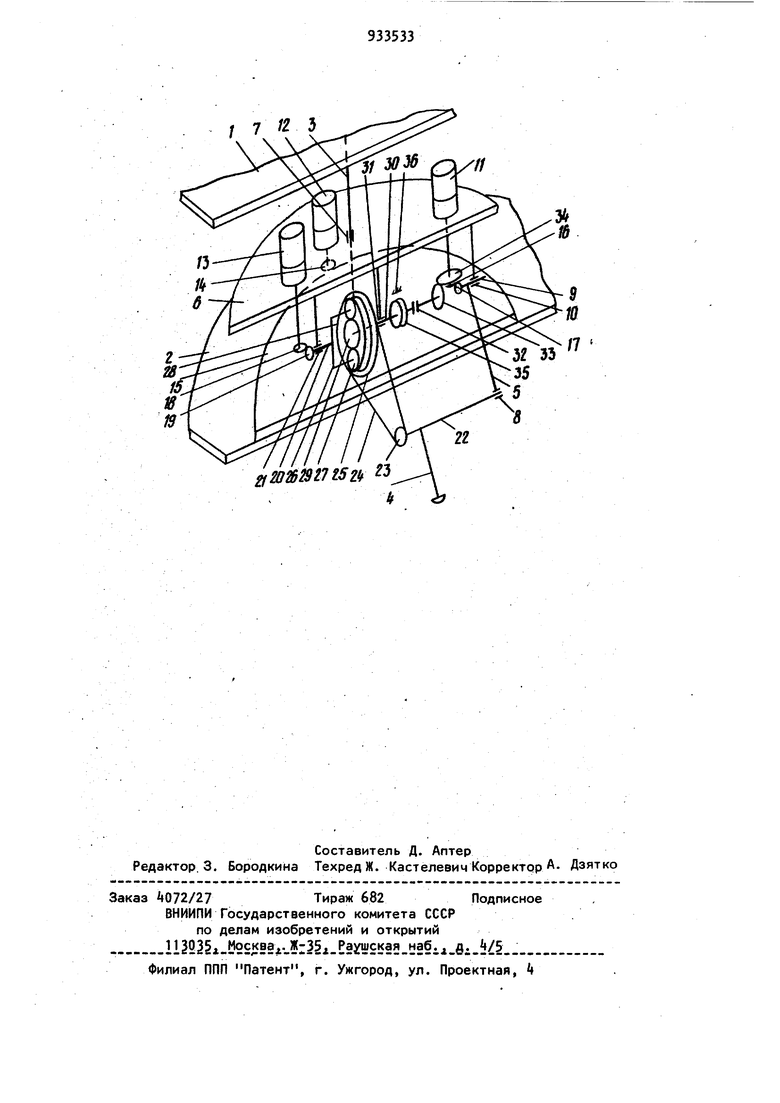
На чертеже изображена принципиальная схема шагающей опоры.
Опора крепится к корпусу шагающей машины, выполненному в виде расположенных одна над другой рам 1 и 2, скрепленных между собой осями 3. Верхняя рама 1 служит для установки аппаратуры обзора и управления, а оси 3 - для крепления на них ojiop машины. .
Каждая опора состоит из голени М, бедра 5 и выполненного в виде плиты корпуса 6 двухстепенного шарнира, который с помощью подшипника 7 установлен на оби 3. Голень k и бедро
5связаны между собой цилиндрическим коленным шарниром 8, а вал Э, на котором закреплено бедро 5, и корпус
6шарнира связаны цилиндрическим шарниром 10 бедра 5. Голень k, бедро 5
и корпус 6 двухстепенного шарнира приводится в движение с помощью состоящих из электродвигателя с редукторо трех следящих приводов - привода 11 поворота бедра в вертикальной плоскости, привода 12 поворота опоры и
привода .13 поворота голени, установ ленных на корпусе 6 двухстепенного шарнира и связанных электрически с аппаратурой управления. При этом выходной вал привода 12 с помощью зубчатого колеса 1 связан с зубчатым сектором 15, неподвижно закрепленным на раме 2. Выходной вал привода 11 с помощью зубчатой пары 16, 17 связан с валом 9, на котором закреплено бедро 5 опоры. Выходной вал привода 13 с помощью зубчатой пары 18, 19 соединен с валом 20, установленным на корпусе 6 с помощью подшипника 21 параллельно валу 9 и перпендикулярно оси 3. Голень k закреплена на валу 22, размещенном в бедре 5 с помощью шарнира 8. На этом же валу закреплен шкив 23, связанный гибкой связью, например, ремнем 2Ц, со шкивом 25. Последний приводится в движение от выходного звена планетарной дифференциальной передачи, которая состоит из водила 26 с установленными в нем сателлитами 27, коронной шестерни 28 и солнечной шестерни 29.
При этом водило 26 дифференциальной передачи насажено на вал 20, связанный с приводом голени через согласующий редуктор, включающий, например, зубчатую пару 18, 19. Шестерня 29, насаженная на вал 30, который с помощью подшипника 31 установлен на корпусе 6, через управляемую сцепную муфту 32 и согласующий редуктор, содержащий зубчатую пару 33, 3, связана с приводом 11. Шестерня 29 может быть остановлена с помощью тормозного устройства, состоящего, например, из насаженного на вал 30 тормозного барабана 35 и тормозной ленты 36. Шкив 25 жестко связан с шестерней 28, которая входит в зацепление с сателлитами 27 и является в данйом случае выходным звеном дифференциальной передачи.
При движении опоры сигналы управ;Ления поступают на приводы 11, 12 и 13, приводя во вращение выходные валы их. редукторов. Так как сектор 15 жестко связан с рамой 2 корпуса, колесо И при вращении выходного вала привода 12 обкатывается по сектору 15, заставляя корпус 6 совершать вращение относительно оси 3. Поскольку вал 9, на котором закреплено бедро 5, связан с корпусом 6 при помощи шарнира 10, то это бедро вместе с голенью J также будет вращаться относительно оси 3, обеспечивая гориз тальное движение машины с помощью опор, взаимодействующих с грунтом, или перенос свободных опор. Если по условиям движения (например, при переносе опоры через высокое препят ствие) угловые скорости бедра и голени имеют одинаковое направление, то по команде от системы управления машиной муфта 32 включается, а лент 36 отпускается. При этом сигналы на подъем и опускание бедра 5 относите но корпуса 6, поступающие на привод 11, через зубчатую пару 16, 17 приводят в движение вал 9 с закрепленным на нем бедром 5, вызывая не тол ко его подъем, но и вращение через согласующую зубчатую пару 33, 3 входного звена дифференциальной пер дачи, связанного с приводом бедра, т.е. шестерни 29. Если при этом на привод 13 поступают свои сигналы управления, то водило 2б приводит в движение оси сателлитов 27, которые в свою очередь, получая добавоч ное вращение от шестерни 29, приво.дят во вращение шестерню 28, установленную свободно на валу 30, и соединенный с ней шкив 25. Далее через ремень 2k, шкив 23 и вал 22 движение передается на голень . Пр этом движение последней относительн бедра 5 складывается из двух движений. Одно вызывается вращением выходного звена дифференциальной передачи (шестерни 28 и связанного с ней шкива 25), а другое - обкатыванием ремня 2 относительно шкива 25 при движении бедра 5 относительно корпуса машины. В результате при соответствующем выборе передаточного числа зубчатой пары 33, З в процессе сгибания бедра 5 относител но рам 1 и 2 ремень 2Ц остается неподвижным (при неработающем приводе голени) относительно поверхности шкива 25 и не вызывает поэтому допол нительного поворота голени Ц относи тельно бедра 5 в шарнире 8. Если же по условиям движения (.например, при опускании опоры для постановки ее на дно ямы) угловые скорости бедра и ./-олени имеют различное направление, то муфта 32 выключается, а лента 36 затягивается. В результате движение бедра 5 относительно рамы 1 влечет за собой 36 обкатывание ремня 2 относительно шкива 25, вызывая дополнительный поворот голени относительно бедра 5, т.е. увеличивая его угловую скорость. Дифференциальная связь между приводами голени и бедра может быть выполнена не только в виде планетарных механизмов с шестернями внутреннего зацепления, но и на цилиндрических или конических зубма- ых колесах, фрикционах и т.п.,, а тормоз может быть любого подходящего вида, совмещенный со сцепной муфтой. Применение предлагаемой опоры позволяет простыми техническими средствами в необходимых случаях резко увеличить скорость поворота голени без изменения ее привода и таким образом увеличить скорость движения шагающей машины и ее проходимость по пересеченной местности. Формула изобретения Шагающая опора транспортного средства, содержащая корпус двухстепенного шарнира, поворотно установленный на вертикальной оси рамы транспортного средства, шарнирно прикрепленное к корпусу бедро и шарнирно соединенную с ним голень, ось которой посредством механической передачи связана с выходным звеном дифференциальной передачи, два других звена которой через согласующие редукторы связаны - один с установленным на корпусе приводом поворота бедра, а другой - с приводом голени, отличающа я с я тем, что, и проходимости и с целью повышения скорости транспортного средства без изменения характеристик привода поворота голени, звено дифференциальной передачи, связанное с приводом поворота бедра, снабжено управляемым тормозом, а между этим звеном и приводом установлена сцепная муфта. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 716898, кл. В 62 D 57/02,26.05.77. 2.Авторское свидетельство СССР tf 751701, кл. В 62 D 57/02,01.12.77 (прЬтотип).
/ 7 2
2i2DW lt5lif
| название | год | авторы | номер документа |
|---|---|---|---|
| Опора шагающей машины | 1977 |
|
SU751701A1 |
| Опора шагающего транспортного средства | 1978 |
|
SU745763A1 |
| Опора шагающего транспортного средства | 1976 |
|
SU716898A1 |
| Колесно-шагающий движитель транспортного средства | 1975 |
|
SU596496A1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| Колесно-шагающий движитель | 1979 |
|
SU880852A1 |
| Трансмиссия секционной колесной машины, преимущественно трактора с шарнирно-сочлененной рамой | 2022 |
|
RU2796857C1 |
| Колесно-шагающий движитель | 1976 |
|
SU569475A1 |
| Колесно-шагающий движитель | 1980 |
|
SU921936A1 |
| Колесно-шагающий движитель транспортного средства | 1981 |
|
SU1000336A1 |