Известны системы записи микропрофиля пути, содержащие динамический преобразователь профиля, буксируемый по дороге, в качестве выходного сигнала которого используют вертикальное ускорение оси колеса, и пересчетиую схему, осуществляюгцую преобразование этого выходного сигнала, иутем двухкратного интегрирования в микропрофиль. Однако изBecTHbie системы не обеспечивают высокой точности записи микропрофиля, поскольку запись производится без учета прогибов шины колеса и, кроме того, относительно длинные неровности (низкие частоты) дорожиого полотна ие записываются из-за узкой полосы пропускания прибора - на длинных неровностях сигнал падает до уровня шумов записывающей аппаратуры, а пересчетная схема эти щумы не учитывает.
В предложенной системе записи микропрофиля пути для расщирення полосы записываемых частот динамический преобразователь профиля выполнен в виде колеса с упругой щиной, которое через рессору и амортизатор нагружено тяжелым грузом, что улучщает контакт колеса с дорогой, причем с осью колеса связана жесткая ферма с подвешенным к ней горизонтальным маятником. Центр качания маятника расположен на оси колеса, что позволяет исключить влияние вертикальных перемещений конца фермы, укрепленного на кузове буксирующего устройства, на маятник. Преобразование выходного сигнала динамического нреобразователя профиля, представляющего собой вертикальное перемещение маятника относительно оси колеса, осуществляется иересчетной схемой, выполненной в виде моделирующего блока, выполняющего обратное преобразование с учетом шумов используемой аппаратуры.
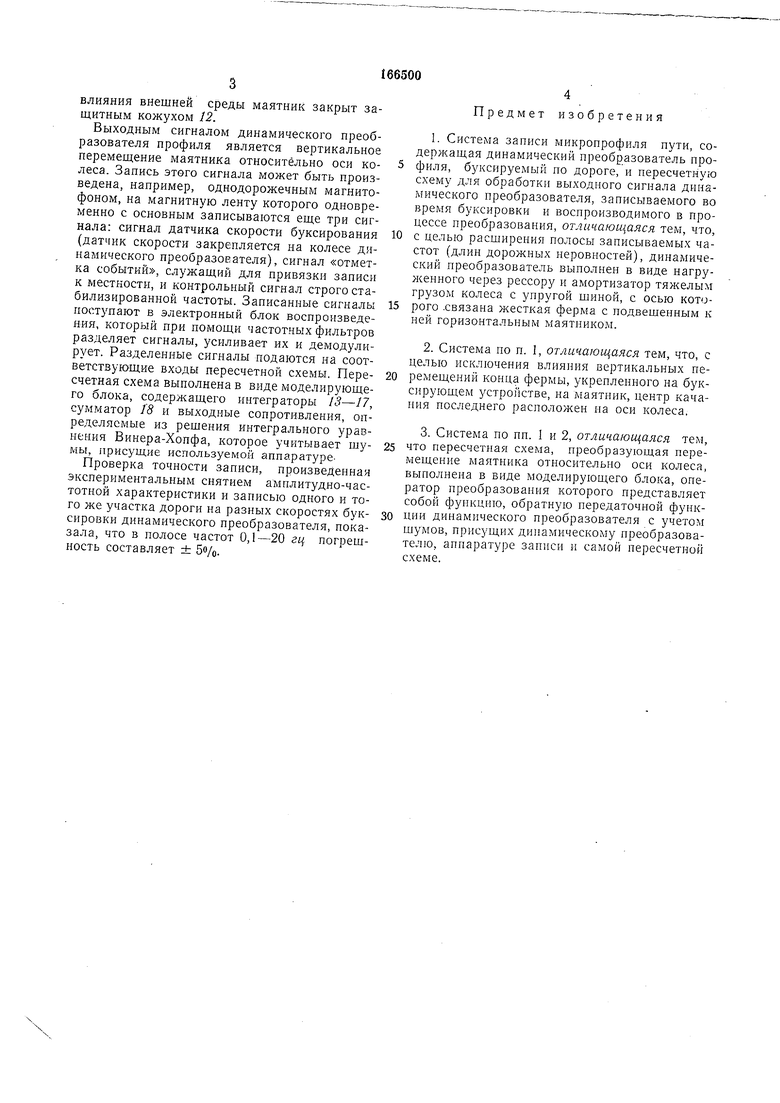
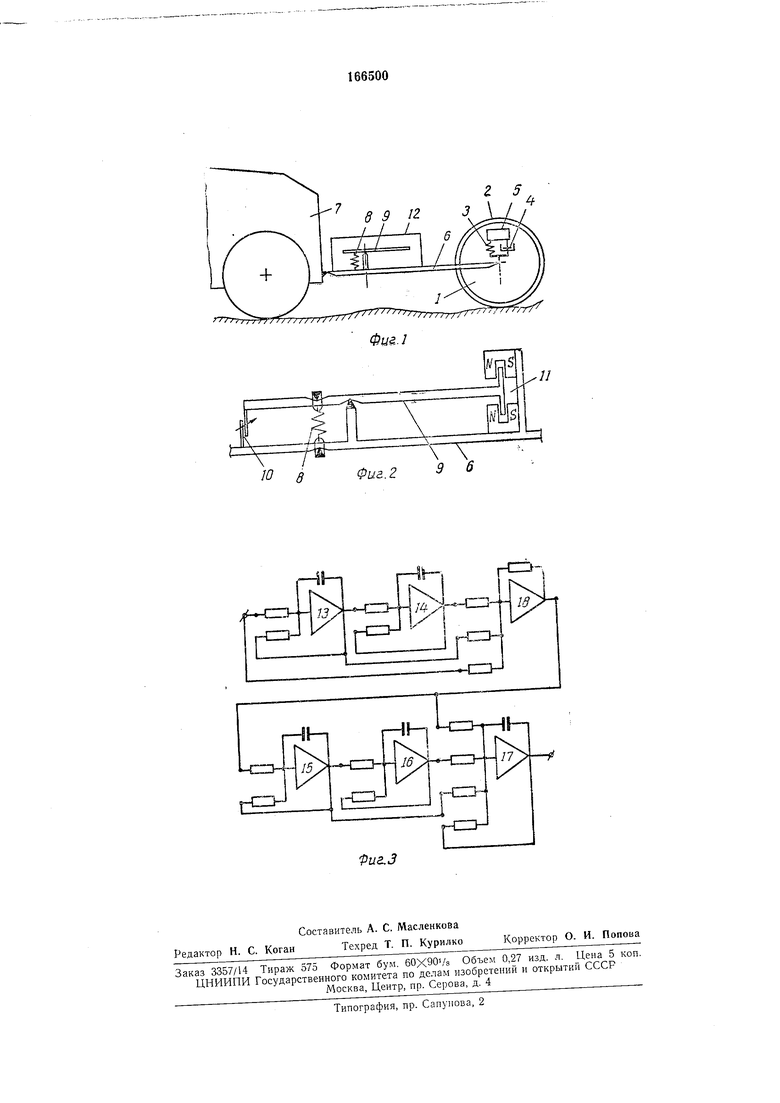
На фиг. 1 показана принципиальная схема динамического преобразователя профиля; на фиг. 2 - схема горизонтального маятника; на фиг. 3 - пересчетная схема.
Динамический преобразователь профиля содержит колесо 1 с упругой, например, пневматической шиной 2, нагруженное через рессору 3 н амортизатор 4 (иапример, гидравлический) тяжелым грузом 5. С осью колеса одни.м концом связана жесткая ферма 6, второй конец которой укреплен на кузове 7 буксирующего автомобиля. К ферме 6 на пружине S подвещен горизонтальный маятник 9. Для того чтобы вертикальные перемещения конца фермы, укрепленного на кузове 7, не влияли на маятннк 9, центр качания маятника расположен на оси колеса. Перемещение маятника относительно фермы (оси колеса) фиксируется индуктивным датчиком 10, а колебания маятника гасятвлияния внешней среды маятник закрыт защитным кожухом 12.
Выходным сигналом динамического преобразователя профиля является вертикальное перемещение маятника относительно оси колеса. Запись этого сигнала может быть произведена, например, однодорожечным магнитофоном, на магнитную ленту которого одновременно с основным записываются еще три сигнала: сигнал датчика скорости буксирования (датчик скорости закрепляется на колесе динамического преобразователя), сигнал «отметка событий, служащий для привязки записи к местности, и контрольный сигнал строго стабилизированной частоты. Записанные сигналы поступают в электронный блок воспроизведения, который при помощи частотных фильтров разделяет сигналы, усиливает их и демодулирует. Разделенные сигналы подаются на соответствующие входы пересчетной схемы. Пересчетная схема выполнена в виде моделирующего блока, содержащего интеграторы 13-17, сумматор 18 и выходные сопротивления, определяемые из рещения интегрального уравпепия Винера-Хопфа, которое учитывает шумы, присущие используемой аппаратуреПроверка точности записи, произведенная экспериментальным снятием амплитудно-частотной характеристики и записью одного и того же участка дороги на разных скоростях буксировки динамического преобразователя, показала, что в полосе частот 0,1-20 гц погрешность составляет ± бе/оПредмет изобретения
1. Система записи микропрофиля пути, содержащая динамический преобразователь профиля, бзксирземый по дороге, и пересчетную схему для обработки выходного сигнала динамического преобразователя, записываемого во время буксировки и воспроизводимого в процессе преобразования, отличающаяся тел;, что, с целью расширения полосы записываемых частот (длин дорожных неровностей), динамический преобразователь выполнен в виде нагруженного через рессору и амортизатор тяжелым грузом колеса с упругой шиной, с осью которого .связана жесткая ферма с подвешенным к ней горизонтальным маятником.
2.Система по п. 1, отличающаяся тем, что, с целью исключения влияния вертикальных перемещений конца фермы, укрепленного на буксирующем устройстве, на маятник, центр качания последнего расположен на оси колеса.
3.Система по пп. 1 и 2, отличающаяся тем, что пересчетная схема, преобразующая перемещение маятника относительно оси колеса, выполнена в виде моделирующего блока, оператор преобразования которого представляет собой функцию, обратную передаточной функЦии динамического преобразователя с учетом шумов, присущих динамическому преобразователю, аппаратуре записи и самой пересчетной схеме.
г 5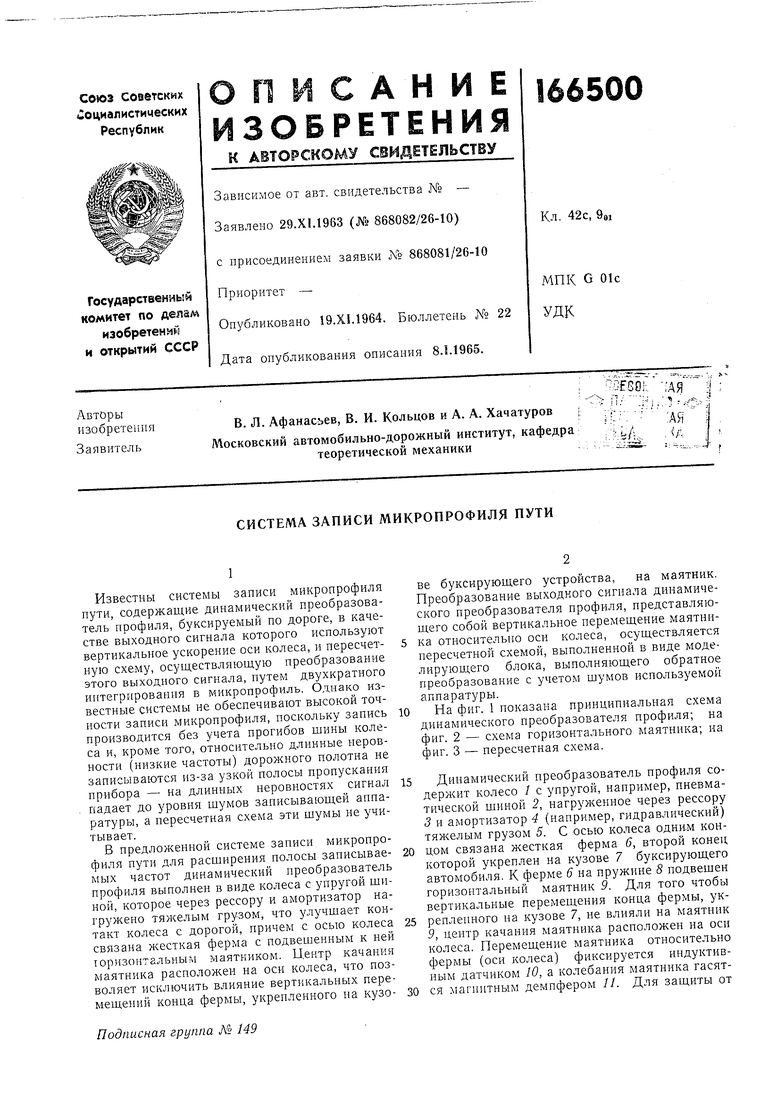
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения временных и частотных параметров микропрофиля опорного основания в режиме реального времени | 2024 |
|
RU2833836C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РОВНОСТИ ПОКРЫТИЯ АВТОМОБИЛЬНЫХ ДОРОГ | 2023 |
|
RU2820228C1 |
| Система регулирования характеристики подвески транспортного средства | 1989 |
|
SU1708667A1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ РОВНОСТИ ПОВЕРХНОСТИ АЭРОДРОМНОГО ПОКРЫТИЯ | 2008 |
|
RU2373323C1 |
| Система регулирования характеристики подвески транспортного средства | 1991 |
|
SU1794699A2 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ СРОКА ЭКСПЛУАТАЦИИ ДОРОЖНОГО ПОКРЫТИЯ | 2012 |
|
RU2521682C2 |
| ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ КЛИРЕНСОМ ТРАНСПОРТНОГО СРЕДСТВА С БОЛЬШИМ КОЛИЧЕСТВОМ ВХОДНЫХ СИГНАЛОВ | 2008 |
|
RU2391222C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕХНИКО-ЭКСПЛУАТАЦИОННЫХ ПОКАЗАТЕЛЕЙ ДОРОЖНЫХ ОДЕЖД | 1996 |
|
RU2117722C1 |
| Способ определения ровности покрытия автомобильных дорог | 2023 |
|
RU2832694C2 |
| ПЕРЕДВИЖНАЯ ЛАБОРАТОРИЯ ДЛЯ ДИАГНОСТИКИ И ИСПЫТАНИЙ АВТОМОБИЛЕЙ | 1994 |
|
RU2086946C1 |
гЧН
-//
1
Фиг.2 9 6
