Изобретение относится к автомобилестроению, в частности к подвескам транспортных средств, и является усовершенствованием известной системы регулирования характеристики подвески транспортного средства по авт. св. № 1708667.
Целью изобретения является повышение эффективности регулирования характеристики подвески транспортного средства путем определения величины неровности перед передним колесом.
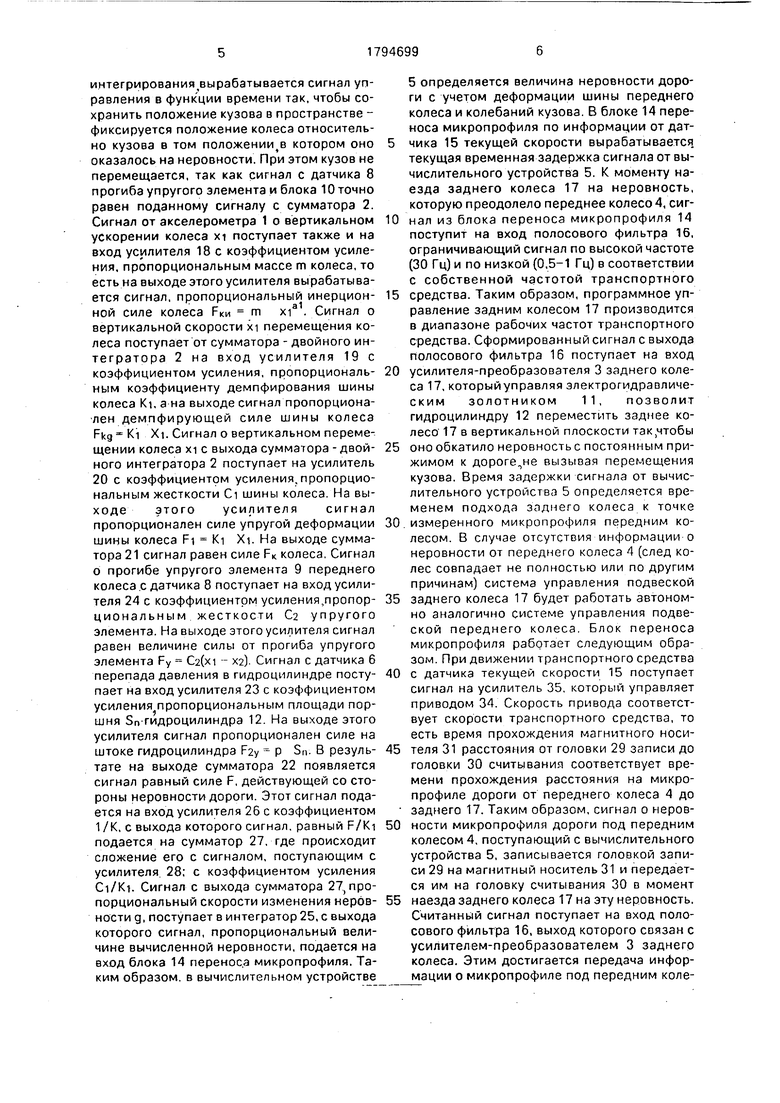
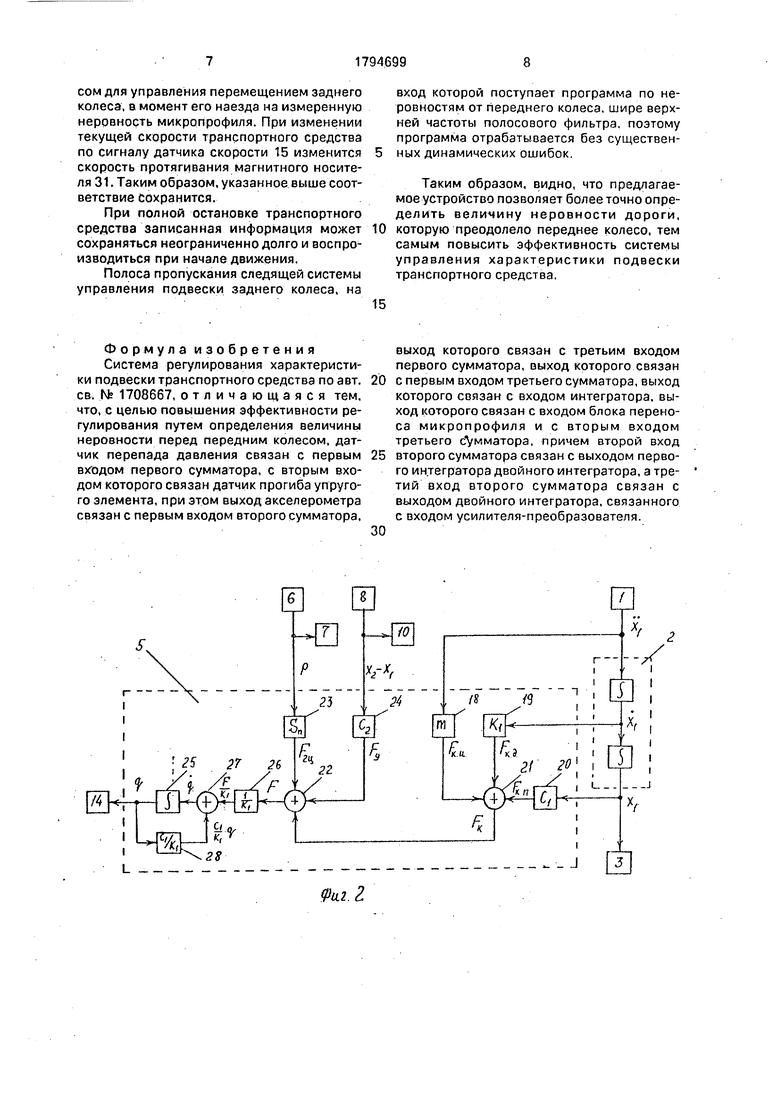
На фиг. 1 изображена схема системы регулирования; на фиг. 2 - структурная схема вычислительного устройства (пример конкретной реализации); на фиг. 3 - пример конкретной реализации блока переноса микропрофиля.
Система регулирования характеристики подвески транспортного средства содержит на каждом колесе транспортного средства акселерометры 1, установленные непосредственно на оси колеса. Выходы их связаны с входами сумматоров двойных интеграторов 2, которые выходами соединены со входами усилителей-преобразователей 3, причем выходы акселерометра 1 и сумматора двойного интегратора 2 переднего колеса 4 соединены, соответственно, со входами вычислительного устройства 5. Входы усилителей-преобразователей 3 связаны с датчиками б перепада давления через блоки формирования 7 и с датчиками 8 прогиба упругого элемента 9 через блоки формирования 10, а выходы усилителей- преобразователей 3 связаны с катушками электромагнитов регуляторов 11 уровня кузова, причем выходы датчика 6 перепада давления и датчика 8 прогиба упругого элемента переднего колеса 4 соединены, соответственно, со входами вычислительного устройства 5. Между рамой и осями колес установлены гидравлические цилиндры 12, работа которых обеспечивается системой гидропитания 13. Блок переноса микропрофиля 14, входы которого соединены с выходом датчика 15 текущей скорости транспортного средства и с выходом вычислительного устройства 5, а выход связан с входом полосового фильтра 16. Выход последнего соединен с входом усилителя-преобразователя 3 заднего колеса 17. Вычислительное устройство 5 (фиг. 2) содержит усилители 18, 19 и 20, входами соединенные с выходом акселерометра 1 и выходами сумматора - двойного интегратора 2 переднего колеса, а выходами со входом сумматора 21. Выход последнего соединен со входом сумматора 22, ко входам которого также подключены вход датчика 6 перепада давления в гидроцилиндре 12 переднего колеса, через усилитель 23, и выход датчика 8 прогиба упругого элемента переднего колеса; через усилитель 24. Выход сумматора 22 подсоединен ко входу интегратора 25 через усилитель 26 и через сумматор 27, ко второму входу которого подключен выход интегратора 25 через усилитель 26. Этот же выход интегратора 25,
который является выходом вычислительного устройства 5, подключен ко входу блока переноса микропрофиля 14. На фиг, 3 изображен пример конкретной реализации блока переноса микррпрофиля. Блок содер5 жит головку записи 29, соединенную с выходом вычислительного устройства 5, головку считывания 30, связанную с входом полосового фильтра 16, магнитный носитель 31, в виде бесконечной ленты, надетой на ведо0 мый 32 и ведущий 33 ролики. Последний связан с приводом 34, который соединен с датчиком текущей скорости 15 через усилитель 35.
Система регулирования-характеристики
5 подвески транспортного средства работает следующим образом.
При наезде колеса транспортного средства на неровность дороги - уступ на шток гидроцилиндра 12 непосредственно дейст0 вует сила вверх. В результате в полостях гидроцилиндра возникает перепад давления, который измеряет дифференциальный датчик 6 давления (в верхней полости повышенное давление по сравнению с нижней
5 полостью). По сигналу датчика 6 в блоке 7 формируется в зависимости от вида графика перепада давления по времени сигнал управления, который поступает на усилитель- преобразователь 3. Далее сигнал поступает
0 на регулятор 11. Золотник регулятора перемещается так, что верхняя полость гидроци- линдра 12 сообщается со сливной магистралью системы гидропитания 13, а нижняя с напорной магистралью. Поршень
5 перемещается вверх и тем самым снимает
усилие со штока. Вместе с поршнем вверх
перемещается и колесо. Ускорение верти кального перемещения колеса измеряет
акселерометр 1,сигнал с которого по0 ступает на сумматор - двойной интегратор 2. В нем осуществляется двойное интегрирование измеренного акселерометром 1 ускорения. В результате интегрирования получается величина вертикального пере5 мещения колеса в функции времени. Таким образом, в любой момент времени известна величина вертикального перемещения колеса, то есть на выходе сумматора 2 получается информация о неровности дороги. По сигналам, поступающим с блокя двойного
интегрирования вырабатывается сигнал управления в функции времени так, чтобы сохранить положение кузова в пространстве - фиксируется положение колеса относительно кузова в том положении котором оно оказалось на неровности. При этом кузов не перемещается, так как сигнал с датчика 8 прогиба упругого элемента и блока 10 точно равен поданному сигналу с сумматора 2. Сигнал от акселерометра 1 о вертикальном ускорении колеса xi поступает также и на вход усилителя 18с коэффициентом усиления, пропорциональным массе m колеса, то есть на выходе этого усилителя вырабатывается сигнал, пропорциональный инерционной силе колеса Р«и m xia1. Сигнал о вертикальной скорости xi перемещения колеса поступает от сумматора - двойного интегратора 2 на вход усилителя 19 с коэффициентом усиления, пропорциональным коэффициенту демпфирования шины колеса Ki, а на выходе сигнал пропорционален демпфирующей силе шины колеса Fkg Ki Xi. Сигнал о вертикальном перемещении колеса хч с выхода сумматора -двойного интегратора 2 поступает на усилитель 20 с коэффициентом усиления, пропорциональным жесткости Ci шины колеса. На выходе этого усилителя сигнал пропорционален силе упругой деформации шины колеса Fi Ki Xi. На выходе сумматора 21 сигнал равен силе F колеса. Сигнал о прогибе упругого элемента 9 переднего колеса .с датчика 8 поступает на вход усилителя 24 с коэффициентом усиления,пропор- циональным жесткости Сг упругого элемента. На выходе этого усилителя сигнал равен величине силы от прогиба упругого элемента Fy C2(xi - Х2). Сигнал с датчика 6 перепада давления в гидроцнлиндре поступает на вход усилителя 23 с коэффициентом усиления пропорциональным площади поршня Sn-гидроцилиндра 12. На выходе этого усилителя сигнал пропорционален силе на штоке гидроцилиндра Fay p Sn. В результате на выходе сумматора 22 появляется сигнал равный силе F, действующей со стороны неровности дороги. Этот сигнал подается на вход усилителя 26 с коэффициентом 1 /К, с выхода которого сигнал, равный F/Ki подается на сумматор 27, где происходит сложение его с сигналом, поступающим с усилителя 28; с коэффициентом усиления Ci/Ki. Сигнал с выхода сумматора 27( пропорциональный скорости изменения неровности д, поступает в интегратор 25, с выхода которого сигнал, пропорциональный величине вычисленной неровности, подается на вход блока 14 переноса микропрофиля. Таким образом, в вычислительном устройстве
5 определяется величина неровности дороги с учетом деформации шины переднего колеса и колебаний кузова. В блоке 14 переноса микропрофиля по информации от дат- 5 чика 15 текущей скорости вырабатывается текущая временная задержка сигнала от вычислительного устройства 5. К моменту наезда заднего колеса 17 на неровность, которую преодолело переднее колесо4, сиг0 нал из блока переноса микропрофиля 14 поступит на вход полосового фильтра 16, ограничивающий сигнал по высокой частоте (30 Гц) и по низкой (0,5-1 Гц) в соответствии с собственной частотой транспортного
5 средства. Таким образом, программное управление задним колесом 17 производится в диапазоне рабочих частот транспортного средства. Сформированный сигнал с выхода полосового фильтра 16 поступает на вход
0 усилителя-преобразователя 3 заднего колеса 17, которыйуправляя электрогидравлическим золотником 11, позволит гидроцилиндру 12 переместить заднее колесо 17 в вертикальной плоскости
5 оно обкатило неровность с постоянным прижимом к дороге не вызывая перемещения кузова. Время задержки сигнала от вычислительного устройства 5 определяется временем подхода заднего колеса к точке
0.измеренного микропрофиля передним колесом. В случае отсутствия информации о неровности от переднего колеса 4 (след колес совпадает не полностью или по другим причинам) система управления подвеской
5 заднего колеса 17 будет работать автономно аналогично системе управления подвеской переднего колеса. Блок переноса микропрофиля работает следующим образом. При движении транспортного средства
0 с датчика текущей скорости 15 поступает сигнал на усилитель 35, который управляет приводом 34. Скорость привода соответствует скорости транспортного средства, то есть время прохождения магнитного носи5 теля 31 расстояния от головки 29 записи до головки 30 считывания соответствует времени прохождения расстояния на микропрофиле дороги от переднего колеса 4 до заднего 17. Таким образом, сигнал о неров0 ности микропрофиля дороги под передним колесом 4, поступающий с вычислительного устройства 5, записывается головкой записи 29 на магнитный носитель 31 и передается им на головку считывания 30 в момент
5 наезда заднего колеса 17 на эту неровность. Считанный сигнал поступает на вход полосового фильтра 16, выход которого связан с усилителем-преобразователем 3 заднего колеса. Этим достигается передача информации о микропрофиле под передним колесом для управления перемещением заднего колеса, в момент его наезда на измеренную неровность микропрофиля. При изменении текущей скорости транспортного средства по сигналу датчика скорости 15 изменится скорость протягивания магнитного носителя 31. Таким образом, указанное выше соответствие Сохранится.
При полной остановке транспортного средства записанная информация может сохраняться неограниченно долго и воспроизводиться при начале движения.
Полоса пропускания следящей системы управления подвески заднего колеса, на
вход которой поступает программа по неровностям от переднего колеса, шире верхней частоты полосового фильтра, поэтому программа отрабатывается без существен- ных динамических ошибок.
Таким образом, видно, что предлагаемое устройство позволяет более точно определить величину неровности дороги, которую преодолело переднее колесо, тем самым повысить эффективность системы управления характеристики подвески транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования характеристики подвески транспортного средства | 1989 |
|
SU1708667A1 |
| Система регулирования характеристики подвески транспортного средства | 1984 |
|
SU1308509A1 |
| Система регулирования характеристики подвески транспортного средства | 1990 |
|
SU1773743A1 |
| Подвеска транспортного средства | 1980 |
|
SU1031803A1 |
| Система управления активными подвесками транспортного средства | 1988 |
|
SU1572838A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УКЛОНОВ, КРИВИЗНЫ, НЕРОВНОСТИ И КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ ДОРОЖНОГО ПОКРЫТИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2162202C1 |
| АКТИВНАЯ ПОДВЕСКА КОРПУСА ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2203812C2 |
| Подвеска корпуса транспортного средства | 1977 |
|
SU753683A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕХНИКО-ЭКСПЛУАТАЦИОННЫХ ПОКАЗАТЕЛЕЙ ДОРОЖНЫХ ОДЕЖД | 1996 |
|
RU2117722C1 |
| Активная подвеска транспортного средства | 1983 |
|
SU1167044A1 |
Изобретение относится к автомобилестроению. Изобретение позволяет повысить эффективность регулирования. Для этого система регулирования снабжена вычисли- тельным устройством, соединенным входами с выходами акселерометра 1 переднего колеса, сумматора 2 двойного интегратора, датчика прогиба упругого элемента 8 и датчика 6 перепада давления в полостях гидроцилиндра переднего колеса, а выходом - с входом блока переноса микропрофиля 14, Использование вычислительного устройства позволяет определить высоту неровности, которую преодолело переднее колесо транспортного средства, с учетом прогиба его шины. Вычислительное устройство решает одну задачу - определение величины неровности дороги в функции времени. 3 ил.
Формула изобретения Система регулирования характеристики подвески транспортного средства по авт. св. № 1708667, отличающаяся тем, что, с целью повышения эффективности регулирования путем определения величины неровности перед передним колесом, датчик перепада давления связан с первым входом первого сумматора, с вторым входом которого связан датчик прогиба упругого элемента, при этом выход акселерометра связан с первым входом второго сумматора,
fe. г
выход которого связан с третьим входом первого сумматора, выход которого связан с первым входом третьего сумматора, выход которого связан с входом интегратора, выход которого связан с входом блока переноса микропрофиля и с вторым входом третьего сумматора, причем второй вход второго сумматора связан с выходом первого интегратора двойного интегратора, а третий вход второго сумматора связан с выходом двойного интегратора, связанного с входом усилителя-преобразователя.
| Система регулирования характеристики подвески транспортного средства | 1989 |
|
SU1708667A1 |
| кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
