Изобретение относится к автомобилестроению, в частности к подвескам транспортных средств.
Цель изобретения - улучшение плавности хода.
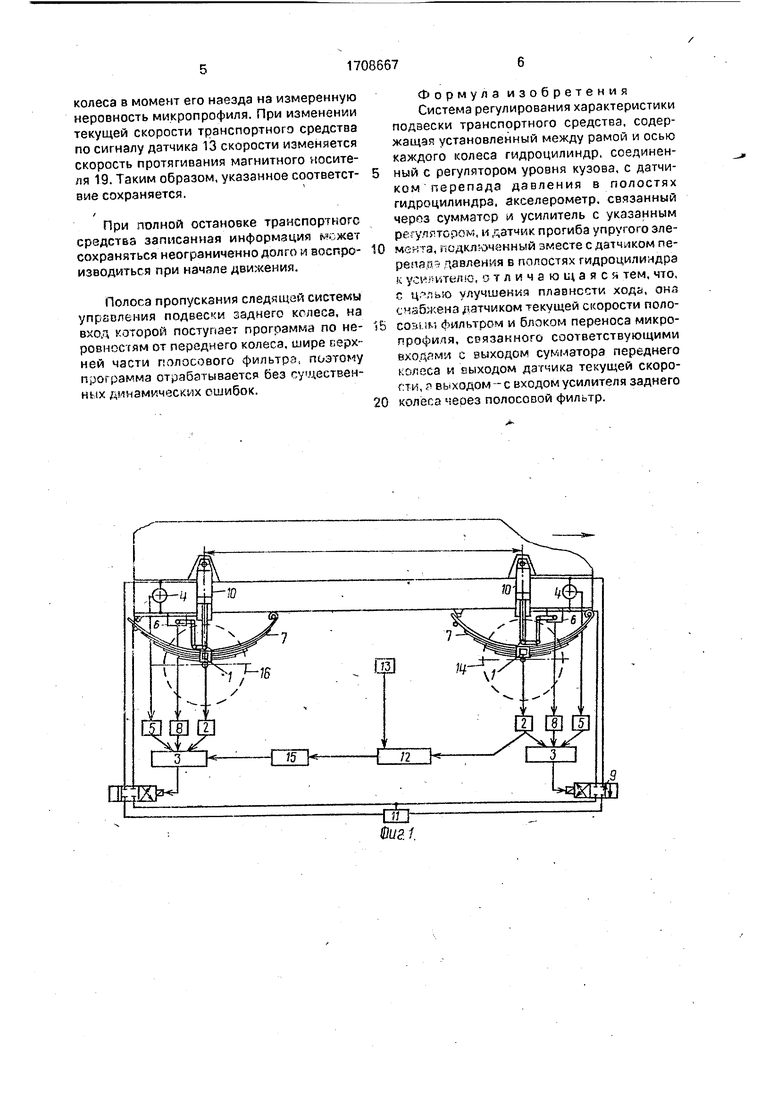
На фиг.1 приведена схема предлагаемой системы; на фиг.2 - схема блока переноса микропрофиля.
Система регулирования характеристики подвески транспортного средства содержит на каждом колесе транспортного средства акселер ометры 1, установленные непосредственно на оси колеса. Выходы их связаны с выходами сумматоров - двойных интеграторов 2, которые выходами соединены с входами усилителей-преобразователей 3.
Входы последних связаны с датчиками 4 перепада давлений через блоки 5 формирования и с датчиками 6 прогиба упругих элементов 7 через блоки 8 формирования, а выходы преобразователей 3 связаны с катушками электромагнитов регуляторов 9 уровня кузова. Между рамой и осями колес установлены гидравлические цилиндры 10. работа которых обеспечивается системой 11 гидропитания. Блок 12 переноса микропрофиля, входы которого соединены с выходом датчика 13 текущей скорости транспортного средства и с вьгходом сумматора 2 переднего колеса 14, а выход связан с входом полосового фильтра 15. Выход последнего соединен с выходом ус11лителяпреобразователя 3 заднего колеса 16.
Система работает следующим образом.
При наезде колеса транспортного средства на неровность дороги - уступ на шток гидроцилиндра 10 непосредственно действует сила вверх. В результате в полостях гидроцилиндра возникает перепад давления, который замеряет дифференциальный датчик 4 давления (в верхней полости повышенное давление по сравнению с нижней полостью). По сигналу датчика 4 в блоке 5 формируется в зависимости от вида графика перепада давления по времени сигнал управления, который поступает на усилитель-преобразователь 3. Далее сигнал поступает на регулятор 9. Золотник регулятора перемещается так, что верхняя полость гидроцилиндра 10 сообщается со сливной магистралью систему 11, а нижняя - с напорной магистралью. Поршень перемещается вверх и тем самым снимает усилие с штока. Вместе с поршнем вверх перемещается и колесо. Ускорение вертикального перемещения колеса измеряет акселерометр 1, сигнал с которого поступает на сумматор 2. В нем осуществляется двойное интегрирование измеренного акселерометрои 1 ускорения. В результате мнтего;1рования получается величина вертикального перемещения колеса в функции времени. Таким образом, а любой момен времени известна величина вертикального перемещения колеса, т.е. на выходе сумма тори 2 получается информация о неровности дороги. По сигналам, поступающим с блока двойного интегрирования (программа по неровностям), вырабатывается сигнал управления а функции времени так, что сохраняется положение кузова в пространстве - фиксируется положение колеса относительно кузова в том положении, в котором оно оказывается на неровности. При этом кузов не перемещается, так как сигнал с датчика 6 прогиба упругого элементе 7 1 блока 8 точно равен поданному сигналу с сумматора. При проезде колесом 15 нерОЕИОсти дороги профиль сигнала на выходе сумматора 2 практически полностью описывает микропрофиль пути (при отсутствии отрыва колеса от дороги). Этот сигнал поступает на вход блока, в котором по информации от датчика 13 вырабатывается текущая временная задержка сигнала от суг-.магора 2 переднего колеса, К моменту наьлда заднего колеса 16 на-неровность, котирую проехало переднее колесо 14, сигнал .гЛ блока 12 поступает на вход полосового фмльтра 15. ограничивающего сигнал по высокой частоте (30 Гц) и по низкой (0,5-1 Гц) в соотЕвтствии с собственной частотой транспортного средства. Таким образом.
программное управление задним колесом 16 производится в диапазоне рабочих частот подвески транспортного средства. Сформированный сигнал с выхода полосового фильтра 14 поступает на вход усилителя-преобразователя 3 заднего колеса 16, который, управляя электрогидравлическим золотником, позволяет гидроцилиндру 10 переместить заднее колесо 16 в вертикальной плоскости так, что оно обкатывает неровность с постоянным прижимом к дороге, не вызывая перемещения кузова. Ошибка измерения неровности обусловлена только разностью прогибов шин переднего и заднего колес, которая на малых и средних скоростях незначительна. Время задержки сигнала от сумматора переднего колеса определяется временем подхода заднего колеса к точке измеренного микропрофиля
передним колесом.
В случае отсутствия информации о неровности от переднего колеса 14 ( след колес совпадает не полностью или по другим
причинам) система управления подвеской заднего колеса работает автономно, аналогично системе управления подвеской переднего колеса.
Блок 12 содержит головку 17 записи,
соединенную с выходом сумматора 2 переднего колеса 14, головку 18 считывания, связанную с выходом полосового фильтра 15. магнитный носитель 19 в виде бесконечной ленты, надетой на ведомый 20 и ведущий 21
ролики. Последний связан с приводом 22, который соединен с датчиком 13 через усилитель 23.
Блок 12 работает следующим образом. При движении транспортного средства
с датчика 13 поступает сигнал на усилитель 23, который управляет приводом 22. Скорость привода соответствует скорости транспортного средства, т.е. время прохождения магнитного носителя 19 расстояния
от головки 17записи до головки 18 считывания соответствует времени прохождения расстояния микропрофиля дороги от переднего колеса до заднего. Таким образом, сигнал о неровности микропрофкля дороги под передним колесом 14, поступающий с
сумматора 2, записывается голоакой 17 записи на магнитный носитель 19 и передается им на головку 18 считывания в момент наезда заднего колеса 16 на эту неровность. Считанный сигнал поступает на вход полосового фильтра 15, выход которого связан с усилителем-преобразователем 3 заднего колеса. Этим достигается передача информации о микропрофиле под передним колесом для управления перемещением заднего
колеса в момент его наезда на измеренную неровность микропрофиля. При изменении текущей скорости транспортного средства по сигналу датчика 13 скорости изменяется скорость протягивания магнитного носителя 19. Таким образом, указанное соответствие сохраняется.
/
При полной остановке транспортного срэдствз записанная информации сохраняться неограниченно долго и воспроизводиться при начале движения.
Полоса пропускания следящей системы управления подвески заднего колеса, на вход которой поступает программа по неровностям от переднего колеса, шире перхней части полосового фильтрз поэтому программа отрабатывается без существенных динамических ошибок.
Ф о р м у л а и 3 о б р е т е н и я Система регулирования характеристики подвески транспортного средства, содержащая установленный между рамой и осью каждого колеса гидроцилиндр, соединенный с регулятором уровня кузова, с датчиком перепада давления в полостях гидроцилиндра. акселерометр, связанный через сумматор и усилитель с указанным регулятором, и датчик прогиба упругого злемекта, подключенный зместе с датчиком перепад5 давления в полостях гидроцилиндра к ycs jH Teivio, отличаюи4аясй тем, что, с и,лью улучшения плавности хода, она снабжена датчиком текущей скорости полосозим фильтром и блоком переноса микропрофиля, связанного соответствующими йходпми с выходом сумматора переднего колеса и выходом датчика текущей скорости, вь ходом - с входом усилителя заднего
колеса через полосовой фильтр.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования характеристики подвески транспортного средства | 1991 |
|
SU1794699A2 |
| Подвеска транспортного средства | 1980 |
|
SU1031803A1 |
| Система регулирования характеристики подвески транспортного средства | 1984 |
|
SU1308509A1 |
| Система управления активными подвесками транспортного средства | 1988 |
|
SU1572838A1 |
| Система регулирования характеристики подвески транспортного средства | 1990 |
|
SU1773743A1 |
| Активная подвеска транспортного средства | 1983 |
|
SU1167044A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕХНИКО-ЭКСПЛУАТАЦИОННЫХ ПОКАЗАТЕЛЕЙ ДОРОЖНЫХ ОДЕЖД | 1996 |
|
RU2117722C1 |
| Активная подвеска корпуса транспортного средства | 1973 |
|
SU598780A1 |
| Система автоматического регулирования характеристики подвески транспортного средства | 1980 |
|
SU998147A1 |
| СИСТЕМА УПРАВЛЕНИЯ АКТИВНОЙ ПОДВЕСКОЙ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2019438C1 |

Изобретение относится к автомобилестроению, в частности к подвескам транспор- тных средств. Цель изобретения - улучшение плавности хода, Система регулирования характеристики подвески транспортного средства включает устанойленный между рамой и мостом гидроцилиндр, соединенный с регулятором уровня кузова, акселерометр, установленный непосредст- аенно на балке моста транспортного средства рядом с колесом, связанный через сумматор и усилитель с указанным регулятором, датчик перепада давлений в полостях гидроцилиндра и датчик прогиба упругого элемента, которые подключены \к усилителю. Система также снабжена дат,чи- ком текущей скорости, полосовым фильтром и блоком переноса микропрофиля, связанным входами с выходом сумматора - переднего колеса и с выходом датчика текущей скорости, а выходом - с входом усилителя заднего колеса через полосовой фильтр. 2 ил.слс
