Изобретение относится к измерительной технике и может быть использовано при испытаниях объемных гидромашин.
Целью изобретения является расширение диапазона измерений за счет исключения необходимости специального препарирования испытуемого гидромотора.
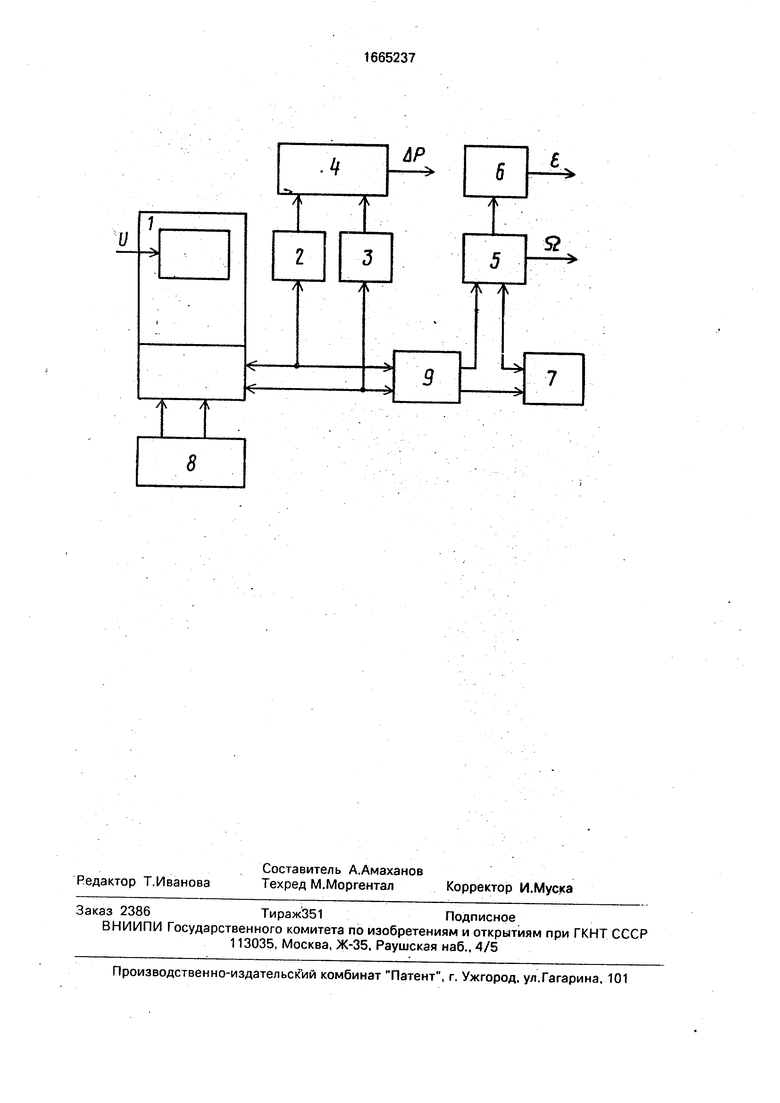
На чертеже показана блок схема устройства для реализации предложенного способа.
Устройство содержит управляемый насос 1, датчики 2 и 3 давления, сумматор 4, датчик 5 частоты вращения, дифференциатор 6, маховик 7 и привод 8 насоса 1.
Сущность предлагаемого способа заключается в следующем.
К валу испытуемого гидромотора 9 подсоединяют маховик 7 с заданным моментом инерции I, а силовые полости гидромотора 9- к управляемому насосу 1, на вход которого подают гармонический сигнал V и регистрируют текущие значения частоты ш вращения вала гидромотора 9 и соответствующие им текущие значения углового ускорения е вала гидромотора и перепада А Р давления в силовых полостях гидромотора 9, по которым рассчитывают текущие значения момента трения, соответствующие текуо о ел ю
GO
XI
щим значениям частоты ш вращения вала гидромотора 9
Рассчитывают по аналитическому выражению
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА БЕЗУДАРНОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ | 2004 |
|
RU2269709C1 |
| Стенд для определения пусковых характеристик реверсивных гидромоторов | 1990 |
|
SU1767202A1 |
| СТЕНД ДЛЯ ГИДРАВЛИЧЕСКИХ ИСПЫТАНИЙ ЕМКОСТЕЙ НА ЦИКЛИЧЕСКУЮ ДОЛГОВЕЧНОСТЬ | 2004 |
|
RU2266440C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ПЛАВНОСТИ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ ГУСЕНИЧНЫХ И КОЛЕСНЫХ МАШИН | 2005 |
|
RU2285847C1 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
| Стенд для испытаний двух объемных регулируемых гидропередач | 1986 |
|
SU1435859A1 |
| ГИДРАВЛИЧЕСКИЙ ВИБРОВОЗБУДИТЕЛЬ ДЛЯ ПОЛУЧЕНИЯ СЕЙСМИЧЕСКОГО СВИП-СИГНАЛА | 1991 |
|
RU2006882C1 |
| Стенд для испытаний гидромоторов | 1986 |
|
SU1359512A1 |
| ГИДРАВЛИЧЕСКИЙ ПРЕСС (ВАРИАНТЫ) | 2001 |
|
RU2217315C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2015 |
|
RU2593325C1 |
Изобретение относится к измерительной технике и может быть использовано при испытаниях объемных гидромашин. Целью изобретения является повышение точности и расширение области применения. К валу испытуемого гидромотора 9 подсоединяют маховик 7 с заданным моментом инерции. Силовые полости гидромотора 9 подсоединяют к управляемому насосу 1, на вход которого подают гармонический сигнал и регистрируют текущее значение частоты ω вращения вала гидромотора 9 и соответствующие им текущие значения углового ускорения 36E вала гидромотора 9 и перепада Δ P ДАВЛЕНИЯ В СИЛОВЫХ ПОЛОСТЯХ ГИДРОМОТОРА 9, ПО КОТОРЫМ РАССЧИТЫВАЮТ ТЕКУЩИЕ ЗНАЧЕНИЯ МОМЕНТА ТРЕНИЯ MТР СООТВЕТСТВУЮЩИЕ ТЕКУЩИМ ЗНАЧЕНИЯМ ЧАСТОТЫ Ω ВРАЩЕНИЯ ВАЛА ГИДРОМОТОРА 9 MТР = ΔР.Q/2N-Yε, где Q - рабочий объем гидромотора 9. 1 ил.
M,,.Ј
где q - рабочий объем гидромотора 9.
При подаче гармонического сигнала V на вход управляемого насоса 1 по магистралям, соединяющим насос 1 и гидромотор 9, потечет пульсирующий расход I рабочего тела. Давление в рабочих полостях гидромотора, измеряемое датчиками 2 и 3, также будет иметь гармоническую
составляющую.
Выходные сигналы датчиков 2 и 3 давления поступают на соответствующие входы сумматора 4, на выходе которого сформируется переменный во времени сигнал, соответствующий текущему значению перепада АР давления в силовых полостях гидромотора.
Под действием изменяющегося во вре- мени расхода рабочего тела вал гидромотора 9 будет вращаться с переменной частотой а) вращения. Ее текущее значение будет регистрироваться датчиком 5. Сигнал от датчика 5, пройдя через дифференциатор 6, преобразуется в сигнал, соответствующий текущему значению углового ускорения е вала гидромотора 9.
Способ реализуют следующим образом.
К валу испытуемого гидромотора 9 подсоединяют маховик 7 с заданным моментом инерции и датчик 5 частоты вращения.
Силовые полости гидромотора подсоединяют к управляющему насосу 1 и к датчикам 2 и 3 давления.
; Запускают привод 8 управляемого насоса 1, на вход которого подают гармонический управляющий сигнал V.
Регистрируют текущее значение частоты (О вращения вала гидромотора 9 и соответствующие им текущие значения углового ускорения Ј вала гидромотора и перепада ДРдавления в силовых полостях гидромотора 9.
Мтр
АР -q
271
1-е
где q - рабочий объем гидромотора 9, текущие значения момента трения МТр, соответствующие текущим значениям частоты о) вращения вала гидромотора.
Полная совокупность соответствующих значений МТрй и АР образуют характеристику трения гидромотора в воде.
Формула изобретения
Способ определения характеристики трения объемного гидромотора, заключающийся в том, что устанавливают соответствие между величиной момента треИия, частотой вращения вала гидромотора и перепадом давления в его силовых полостях, в рабочем диапазоне изменения этих параметров, о тличающийся тем, что, с целью повышения точности и расширения диапазона измерений за счет исключения необходимости специального препарирования испытуемого гидромотора, к валу
гидромотора подсоединяют маховик с заданным моментом инерции I, а силовые полости гидромотора подсоединяют к управляемому насосу, на вход которого подают гармонический сигнал и регистрируют
текущее значение частоты со вращения вала гидромотора и соответствующие им текущие значения углового ускорения Ј в.ала гидромотора и перепада АР давления в силовых полостях гидромотора, по которым рассчитывают текущие значения момента трения МТр, соответствующие текущим значениям частоты совращения вала гидромотора
Мтр
АР
2л
где q - рабочий объем гидромотора.
| Байта Т М | |||
| Устройство станционной централизации и блокировочной сигнализации | 1915 |
|
SU1971A1 |
| Халат для профессиональных целей | 1918 |
|
SU134A1 |
| Экспериментальное исследование момента трения между блоком цилиндров и распределением в аксиальных гидромашинах | |||
| - Челябинский политехнический институт, тематический сборник научных трудов, вып | |||
| Тепловой измеритель силы тока | 1921 |
|
SU267A1 |
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |
