Изьбретение относится к машиностроению, а именно к стендам для ускоренных испытаний объемных гидроприводов, и может быть использовано в тех отраслях, где необходимо проводить динамические испытания объемных гидродвигателей.
Цель изобретения - повьшение точности и обеспечение автоматического
/ цикла испытаний.
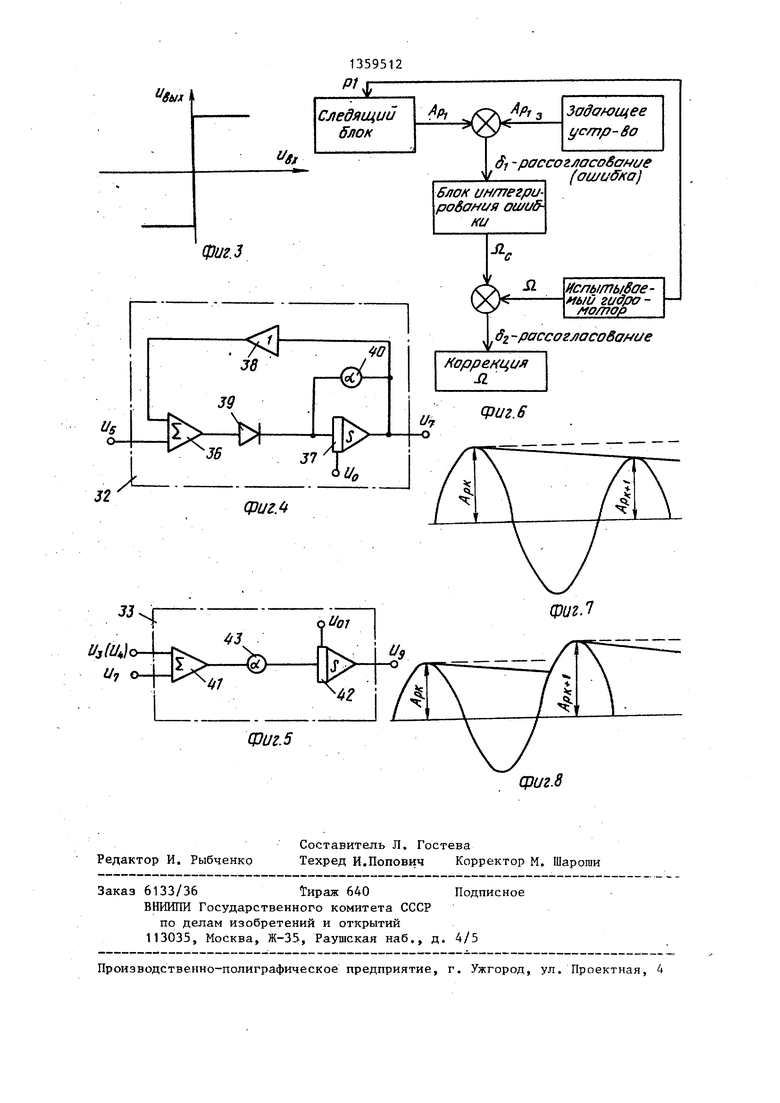
На фиг.1 представлена принципиальная схема стенда; на фиг.2 - блок- схема системы управления; на фиг.З график характеристики блока нелинейности; на фиг.4 - схема следящего блока; на фиг.5 - схема блока интегрирования ошибки; на фиг.6 - алгоритм работы стенда; на фиг.7 - график, пояcняюп ий принцип определения амплитуд 20 фиксации реверса - к датчику 18 угтекущих значений давления жидкости в рабочих полостях испытуемого гидромотора при возрастании угловой скорости вращения вала; на фиг.8 - то же, при снижении угловой скорости вращения вала.
Стенд содержит (фиг.1) источник 1 питания, подсоединенный через обратный клапан 2 ко входу 3 испытуемого гидромотора 4, вход 5 которого соединен со сливом 6 через нагрузочное устройство 7, два пневмогидро- аккумулятора 8,9 и четырехлинейный трехпозиционньш реверсивный распределитель 10 с электроуправлением. Пневмогидроакку У1уляторы 8,9 и распределитель 10 установлены в линиях связи источника 1 питания и нагрузочного устройства 7 со входами 3 и 5 испытуемого гидромотора 4. Стенд .снабжен системой 11 управления, с которой электрически связаны органы .12 и 13 управления распределителем 10, а также два датчика 14 и 15 дав- л.ения, предохранительные клапаны. 16 и 17, по дключенные каждый к одному из входов 3 и 5 испытуемого гидромотора 4, и датчик 18 угловой скорости вращения вала 19 испытуемого гидромотора 4. На валу 20, связанном с валом 19 муфтой 21, установлена инерционная масса 22.
Система 11 управления стенда (фиг.2) содержит блок 23 фиксации реверса и два контура 24 и 25 управления. Блок 23 фиксации реверса выполнен в виде последовательно установленных усилительного устройства 26, блока 27 нелинейности с релейной
5
характеристикой (фиг.З) и реле 28, имеющее соответственно первую и вторую группы 29,30 контактов. С блоком
23фиксации реверса связаны контуры
24и 25 управления, каждый из которых выполнен в виде последовательно установленных усилительного устройства 31, следящего блока 32, блока
33 интегрирования ошибки и задающего устройства 34. При этом каждьш контур 24 и 25 управления связан выходом блока 33 интегрирования ошибки с первой группой 29 контактов реле 28, причем контур 25 - через инвертирующее устройство 35. Входы контуров 24 и 25 управления подключены к датчикам давления 14 и 15 соответственно, вход усилительного устройства 26 блока 23
ловой скорости вращения вала 19, а вторая группа 30 контактов реле 28 - к органам 12 и 13 управления распределителем 10 о 5 Следящий блок 32 (фиг.4) контуров
24и 25 управления выполнен из последовательно установленных сравнивающего, интегрирующего и инвертирующего устройств 36,37 и 38 соответст0 венно, при этом один вход сравнивающего устройства 36 соединен с выходом усилительного устройства 31, другой- с выходом инвертирующего устройства 38, а выход - через диодный элемент
.. 39 со входом интегрирующего устройст0-;
ва 3/, выход которого через делитель 40 напряжения соединен со своим же входом и входом инвертируюпдего устройства 38.
0 Блок 33 интегрирования ошибки (фиг.5) контуров 24 и 25 управления выполнен из последовательно установленных сравнивающего и интегрирующего устройств 41 и 42, при этом один
5 вход сравнивающего устройства 41 соединен с выходом следящего блока 32, другой вход - с задающим устройством 34, а выход - через делитель 43 напряжения с входом интегрируюQ щего устройства 42, выход которого в контуре 24 управления соединен непосредственно с первой группой 29 контактов реле 28, а выход в контуре
25управления - через инвертирующее 5 устройство 35с.
В общем случае работа стенда происходит следующим образом (фиг.6).
При заданных амплитудах давления на входах 3 и 5 гидромотора 4, соответствующих величинам А
р)-,
задача системы 11 управления состоит в отслеживании величины ошибки 5, между заданными параметрами Ар и Ар2 и текущими Ар и Ар. и в подборе такой угловой скорости 57, вращения вала 19, которая обеспечивает заданное значение амплитуды давления и соответствующую частоту переключения распределителя 10. В процессе поиска величина Q постоянно сравнивается с текущим значением угловой скорости ST. вращения вала 19 и в случае, если
1359512
и А р2 ,j рирующего устройства 37 через инвертирующее устройство 38 - сигнал 1.. с измененным на противоположный знаком, при этом в память интегрируюluero устройства 37 заносится сигнал U-J., соответству;ощ 1Й амплитуде Ар текущего давления Р, , при котором произошел реверс гидромотора 4. 10 При значениях сигналов U 5- на выходе сравнивающего устройства 36 диодньй элемент 39 пропускает ток и напряжение U возрастает, пока не станет больше, чем сигнал , При
величина рассогласования S между ни- 15 этом диолт;ный элемент 39 запирается.
ми достигает нуля, происходит реверс распределителя 10. В систему 11 управления со спедиального пульта в виде задающего устройства 34 вводятся значения напряжений U и U , ява ин тегрирующее устройство 37 заносит в память амплитуду значения давления Р,. Цепь следящего блока 32, состоящая из делр5теля 40 напряжения, 20 служит для плавного изменения сигнала U-,,, а следовательно, и величины давления Р, при уменьшении и возрастании амплитуды текущего значения - давления на входе 3 гидромотора 4
ляющихся анапогами давлений и Л зз с амплитудами Api и ветственно. На валу 20, связанном с валом 19 через муфту 21, устанавливают инердионную массу 22, соответст- 25 (фиг.8 и 9). Задача блока 33 интегри- вующую требуемому моменту инерции, рования ошибки при поступлении сигнаа пневмогидроаккумуляторы 8 и 9 настраивают на заданные амплитуды давления Ар, и А. Включение распределителя 10 в одну из рабочих позиций зависит от реле 28, переключением которого управляет блок 27 нелинейности, по знаку переменной суммы сиг-; налов напряжений Ug и U 2. являющихся аналогами параметров 0. и f2 соот- .,5 жения, в котором задается скорость ветственно (фиг.2). Вял 19 гидромото- изменения сигнала U-, поступает в инра 4 под действием давления Р на
тегрирующее устройство 42, вырабаты- вающее сигнал скорости реверса гидромотора 4, который должен привести к
входе 3, например, начинает вращаться. Увеличение скорости вращения на начальном этапе работы ограничиваетсяидо уменьшению рассогласования между сиг- уровнем, определяемым сигналом UQ, налами U и Uj. в данный момент време- как начальное условие для интегрирующего устройства 42 блока 33 интегрирования ошибки. Далее величина необходимой угловой скорости вращения вала 19 гидромотора 4 определяется самой системой управления. Сигналы и и и, с датчиков 14 давления и 18 угловой скорости врагдения поступают
в систему 11 управления на усилитель- 50 7 нелинейности. При достижении ; ные устройства 31 и 26. После усили- равенства поступивших сигналов U, тельного устройства 31 контура 24 управления сигнал Uj- поступает в следящий блок 32, которьй определяет амплитуду текущего давления Р, - сиг- gg тов, в результате чего происходит нал U-,, при котором произошел реверс переключение органов 12 и 13 управле- гидромотора 4.
В следящем блоке 32 (фиг.4) на вход поступает сигкал Uj и от интегни.
Далее сигнал Uo подается в блок 23 фиксации реверса на один вход блока 45 27 нелинейности через первую группу 29 контактов реле 28. Одновременно сигнал и,2 э преобразованный после усилительного устройства 26 в сигнал и 13 подается на другой вход блока
It и,з блок 27 нелинейности осуществляет переключение контактов реле 28 в первой и второй группах 29,30 контакния распределителем 10 в другую рабочую позицию. При зтом валы 19 и 20 продолжают вращение в прежнем направluero устройства 37 заносится сигнал U-J., соответству;ощ 1Й амплитуде Ар текущего давления Р, , при котором произошел реверс гидромотора 4. При значениях сигналов U 5- на выходе сравнивающего устройства 36 диодньй элемент 39 пропускает ток и напряжение U возрастает, пока не станет больше, чем сигнал , При
этом диолт;ный элемент 39 запирается.
а ин тегрирующее устройство 37 заносит в память амплитуду значения давления Р,. Цепь следящего блока 32, состоящая из делр5теля 40 напряжения, служит для плавного изменения сигнала U-,,, а следовательно, и величины давления Р, при уменьшении и возрастании амплитуды текущего значения - давления на входе 3 гидромотора 4
(фиг.8 и 9). Задача блока 33 интегри- рования ошибки при поступлении сигнала и на один из входов сводится -к определению сигнала и„, соответствующего параметру угловой скорости О.
вращения, при которой осуществляется реверс гидромотора 4. В сравнивающем устройстве 41 сигнал U сравнивается с сигналом U, от задающего устройства 34, а затем через делитель 43 напрятегрирующее устройство 42, вырабаты- вающее сигнал скорости реверса гидромотора 4, который должен привести к
уменьшению рассогласования между сиг- налами U и Uj. в данный момент време-
уменьшению рассогласования между сиг- налами U и Uj. в данный момент време-
ни.
Далее сигнал Uo подается в блок 23 фиксации реверса на один вход блока 27 нелинейности через первую группу 29 контактов реле 28. Одновременно сигнал и,2 э преобразованный после усилительного устройства 26 в сигнал и 13 подается на другой вход блока
7 нелинейности. При достижении ; равенства поступивших сигналов U, тов, в результате чего происходит переключение органов 12 и 13 управле-
It и,з блок 27 нелинейности осуществляет переключение контактов реле 28 в первой и второй группах 29,30 контак 7 нелинейности. При достижении ; равенства поступивших сигналов U, тов, в результате чего происходит переключение органов 12 и 13 управле-
ния распределителем 10 в другую рабочую позицию. При зтом валы 19 и 20 продолжают вращение в прежнем направлении за счет инерционной массы 22, что приводит к росту давления Р,,, на входе гидромотора 4 о При срабатывании обратного клапана 2 источник 1 питания работает на слив, скорость вращения вала 19 гидромотора 4 резко падает вслед за снижением давления Р на входе 3, затем начинает падать и давление Р на входе 5. Это вызывает открытие обратного клапана 2, угловая скорость вращения вала 19 снижается до нуля. При интенсивной подаче рабочей жидкости на вход 5 гидромотора 4 давление Р возрастает, и гидромотор 4 начинает вращаться в противоположную сторону. Система 11 управления при этом работает аналогично.
Формула изобр етения
1. Стенд для испытаний гидромоторов, содержащий источник питания, подключенный через обратный клапан к одному из входов испытуемого гидро- 25 мотора, другой вход которого подключен к сливу через нагрузочное устройство, два пневмогидроаккумулятора, подключенные каждый к одному из входов испытуемого гидромотора, и рас- зо пределитель, от-личающийся тем, что, с целью повышения точности - и автоматического обеспечения цикла испытаний, стенд снабжен системой управления, двумя датчиками давления, двумя предохранительными клапанами, подключенными каждый к одному из входов испытуемого гидромотор.а, датчиком угловой скорости вращения вала испытуемого гидромотора, распределитель Q выполнен четырехлинейным трехпозици- онным реверсивным с злектроуправлени- ем и установлен в линиях связи испытуемого гидромотора с обратным кла35
го блока, выход которого соединен с одним из входов блока интегрирования ошибки, другой вход которого соединен с задающим устройством, а выход - с блоком фиксации реверса, .выполненным в виде блока нелинейности, усилительного устройства и реле с первой и второй группами контактов, подключенных между собой так, что вход усилительного устройства соединен с датчиком угловой скорости вращения вала испытуемого гидромотора, а выход - с одним из входов блока нелинейности, другой вход которого соединен с. первой группой контактов реле, к которой подключен также выход блока интегрирования ошибки первого и второго контуров управления, причем блок интегрирования ошибки одного из контуров управления подключен к блоку фик- фиксации реверса через инвертирую- . щее устройство, при этом выход блока нелинейности соединен с обмоткой реле, вторая группа контактов которого подключена к органам управления распределителя.
2, Стенд ПОП.1, отличающийся тем, что следящий блок каждого контура управления выполнен в виде сравнивающего, интегрирующего и инвертирующего устройств, подключенных между собой так, что один вход сравнивающего устройства соеди-- нен с выходом усилительного устройства, другой вход - с выходом инвертирующего устройства, а выход - че, рез диодньй элемент с входом интегрирующего устройства, выход -которого соединен через делитель напряжения со своим же входом, а так же с входом инвертирующего устройства, блок интегрирования ошибки каждого контура
управления вьтолнен в виде сравниваю- паном и нагрузочным устройством, лри- . щего и интегрирующего устройств, под- чём органы управления распределителем ключенных между собой так, что один
вход сравнивающего устройства соединен с выходом следящего блока, другой вход - с задающим устройством, выход сравнивающего устройства через делитель напряжения соединен с входом интегрирующего устройства, выход которого в одном контуре управления соеи датчики электрически связаны с системой управления, которая содержит блок фиксации реверса и два контура управления, каждьй из которых выполнен в виде задающего и усилительного устройств следящего блока и блока интегрировайия ошибки, подключенных между собой так, что вход усилительного устройства соединен с датчиком давления, а выход - с входом следяще50
55
динен непосредственно с первой группой контактов реле, а в другом контуре - через инвертирующее устройство.
0
5
0
5 о Q
5
го блока, выход которого соединен с одним из входов блока интегрирования ошибки, другой вход которого соединен с задающим устройством, а выход - с блоком фиксации реверса, .выполненным в виде блока нелинейности, усилительного устройства и реле с первой и второй группами контактов, подключен ных между собой так, что вход усилительного устройства соединен с датчиком угловой скорости вращения вала испытуемого гидромотора, а выход - с одним из входов блока нелинейности, другой вход которого соединен с. первой группой контактов реле, к которой подключен также выход блока интегрирования ошибки первого и второго контуров управления, причем блок интегрирования ошибки одного из контуров управления подключен к блоку фик- фиксации реверса через инвертирую- . щее устройство, при этом выход блока нелинейности соединен с обмоткой реле, вторая группа контактов которого подключена к органам управления распределителя.
2, Стенд ПОП.1, отличающийся тем, что следящий блок каждого контура управления выполнен в виде сравнивающего, интегрирующего и инвертирующего устройств, подключенных между собой так, что один вход сравнивающего устройства соеди-- нен с выходом усилительного устройства, другой вход - с выходом инвертирующего устройства, а выход - че, рез диодньй элемент с входом интегрирующего устройства, выход -которого соединен через делитель напряжения со своим же входом, а так же с входом инвертирующего устройства, блок интегрирования ошибки каждого контура
55
динен непосредственно с первой группой контактов реле, а в другом контуре - через инвертирующее устройство.
М
5| 4
А
ГАЛГ I
1359512
Pfx
Следящий блон
Лг
Apj
/Лз
Задающее yc/np-So
Блок интегри- робания ошибffU
д -рассогласовамс/е (ошибка)
фиг.З
7
37
Фиг А
33
SL
1{слыты8ое- мый гидра - / о/лор
di -рассогласова/ ие
/ оррен14ия J2
(риг. 6
(риг.8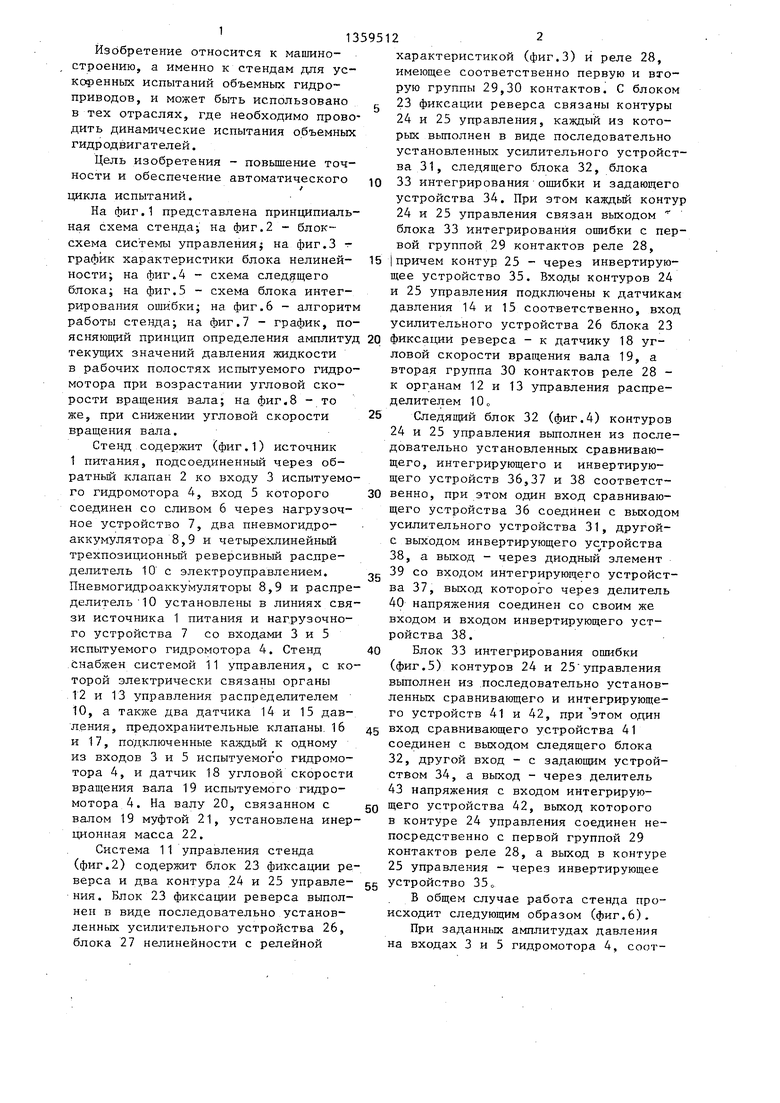
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая следящая система | 1985 |
|
SU1317189A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Стенд для испытаний двух объемных регулируемых гидропередач | 1986 |
|
SU1435859A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| Электрогидравлический следящий привод | 1988 |
|
SU1557370A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1984 |
|
SU1285953A1 |
| Следящая система,квазиоптимальная по быстродействию | 1983 |
|
SU1155996A1 |
| Следящая система | 1980 |
|
SU962841A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
| Стенд для испытания рулевых механизмов | 1979 |
|
SU802834A1 |
Изобретение относится к машиностроению и позволяет повысить точность и обеспечить автоматический , цикл испытаний. Стенд содержит источник 1 питания, обратный клапан 3, гидромотор 4, слив 6, нагрузочное устр-во 7, пневмогидроаккумуляторы „ 8,9, четырехлинейный трехпозиционньй реверсивный распределитель 10, систему 11 управления, датчики 14,15 давления, предохранительные клапаны ФтЛ 16,17, датчик 18 угловой скорости вращения вала 19. Система 11 содержит блок фиксации реверса и два контура управления, каждьм из которых выполнен в виде последовательно установленных усилительного устр-ва, следящего блока, блока интегрирования ошибки и задающего устр-ва. При заданных амплитудах давления на входах гидромотора, соответствующих величинам Ар. и Р7 система 11 отслеживает величину ошибки 5, между заданными параметрами Ар, и Ар и текущими Ар, и Ар .С помощью системы 11 подбирается такая угловая cicopocTb f2j. вращения вала 19, которая обеспечивает заданное значение амплитуды давления и соответствующую частоту переключения распределителя 10, В процессе поиска величина Q постоянно сравнивается с текущим значением угловой скорости Q вращения вала 19. В случае нулевого рассогласования между ними происходит реверс распределителя. 1 з.п. ф-лы, 8 ил. (Л со СП СО ел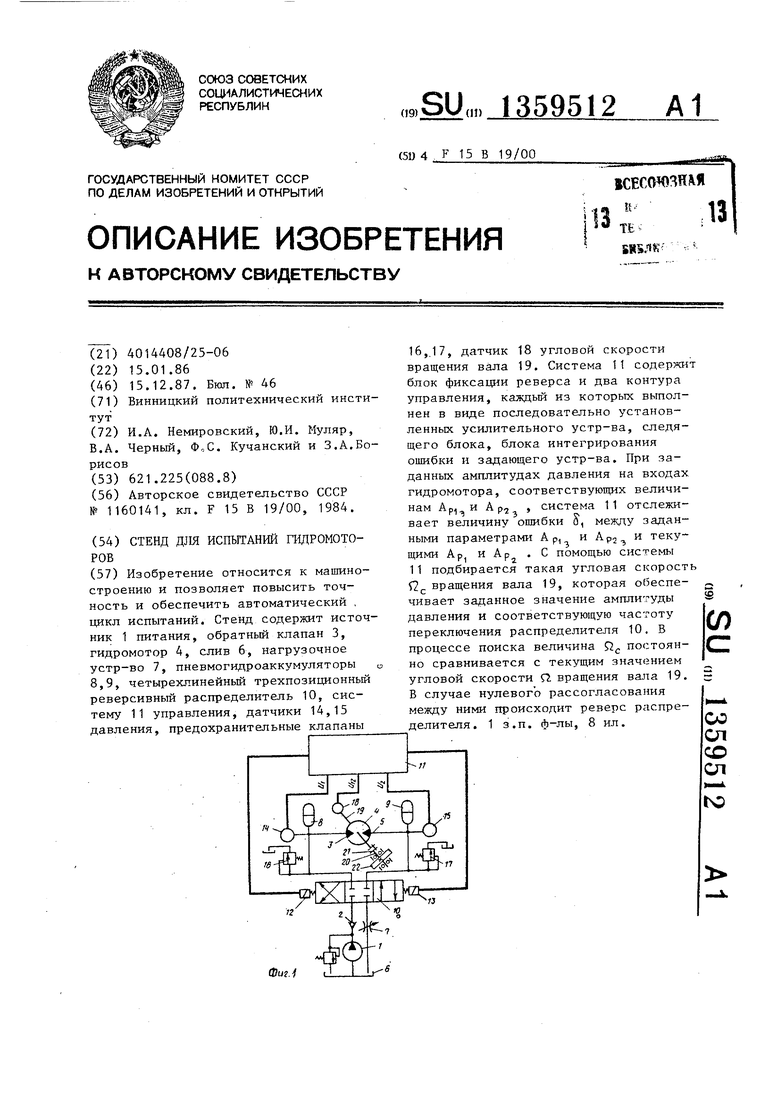
Редактор И. Рыбченкр
Составитель Л. Гостева
Техред И.Попович Корректор М. Шароши
Заказ 6133/36Тираж 640 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Стенд для испытаний гидромоторов | 1984 |
|
SU1160141A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
