Изобретение относится к землеройной технике, а более конкретно к экскаваторам- драглайнам.
Цель - расширение эксплуатационных возможностей путем увеличения радиуса копания.
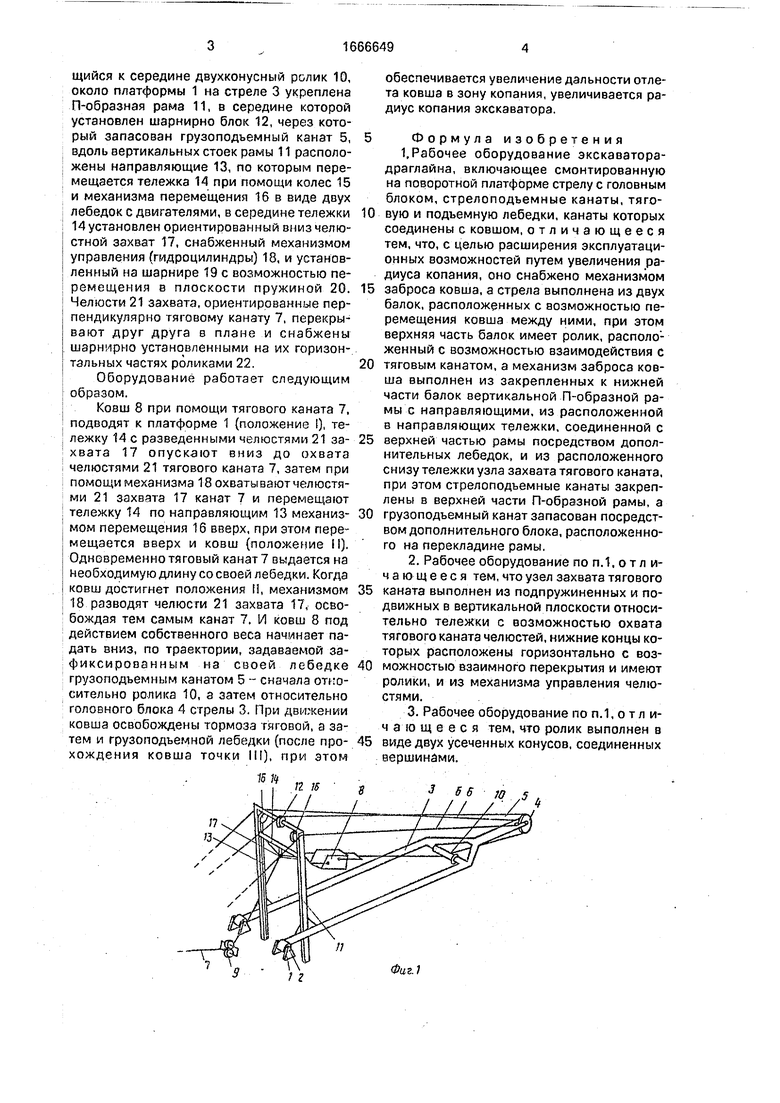
На фиг.1 и 2 изображено рабочее оборудование экскаватора, вид сбоку; на фиг.З - узел соединения тележки с направляющей.
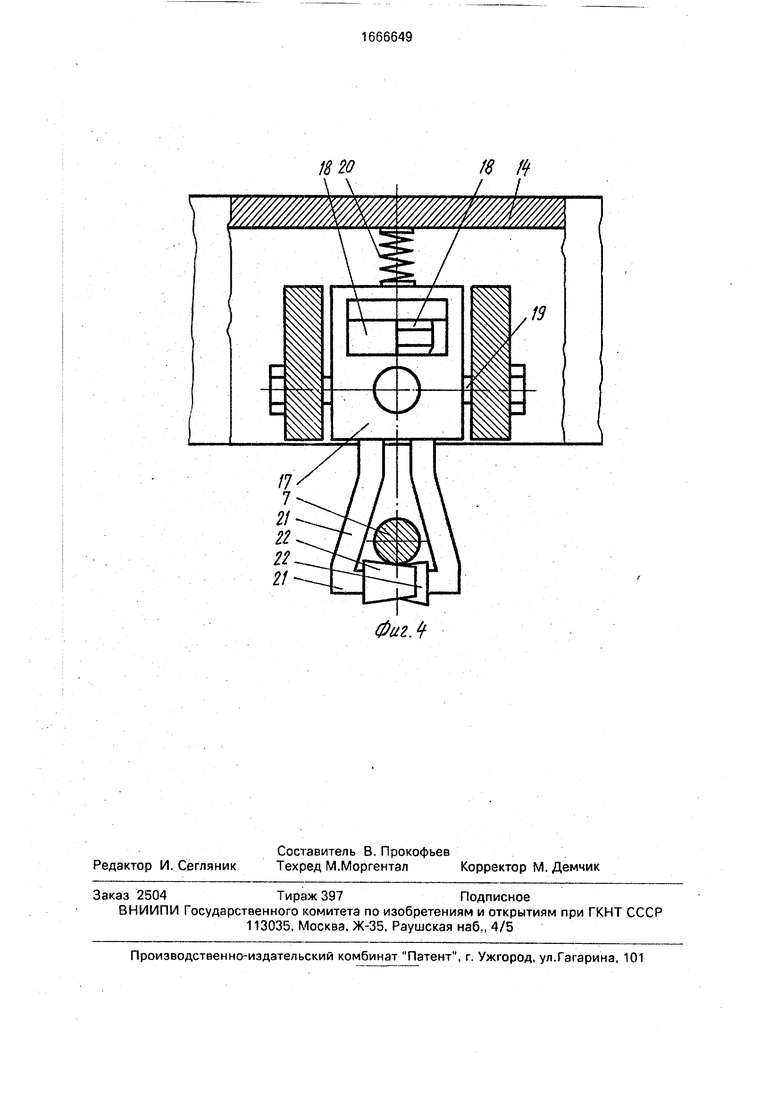
вид в плане; нафиг.4-узел захвата тягового каната, вид спереди.
Рабочее оборудование состоит из смонтированной на поворотной платформе 1 на шарнирах 2 двухбалочной стрелы 3 с головным блоком 4, снабженной грузоподъемным 5, стрелоподъемным 6, тяговым 7 канатами с соответствующими лебедками, ковша 8, наводки 9, в головной части стрелы шарнирно установлен удлиненный сужающийся к середине двухконусный ролик 10, около платформы 1 на стреле 3 укреплена П-образная рама 11, в середине которой установлен шарнирно блок 12, через который запасован грузоподъемный канат 5, вдоль вертикальных стоек рамы 11 расположены направляющие 13, по которым перемещается тележка 14 при помощи колес 15 и механизма перемещения 16 в виде двух лебедок с двигателями, в середине тележки 14 установлен ориентированный вниз челюстной захват 17, снабженный механизмом управления (гмдроцилиндры) 18, и установленный на шарнире 19с возможностью перемещения в плоскости пружиной 20. Челюсти 21 захвата, ориентированные перпендикулярно тяговому канату 7, перекрывают друг друга в плане и снабжены шзрнирио установленными на их горизонтальных частях роликами 22.
Оборудование работает следующим образом.
Ковш 8 при помощи тягового каната 7, подводят к платформе 1 (положение ), тележку 14 с разведенными челюстями 21 за- хвата 17 опускают вниз до охвата челюстями 21 тягового каната 7, затем при помощи механизма 18 охватываютчелюстя- ми 21 захвата 17 канат 7 и перемещают тележку 14 по направляющим 13 механиз- мом перемещения 16 вверх, при этом перемещается вверх и ковш (положение II). Одновременно тяговый канат 7 выдается на необходимую длину со своей лебедки. Когда ковш достигнет положения II, механизмом 18 разводят челюсти 21 захвата 17, освобождая тем самым канат 7. И ковш 8 под действием собственного веса начинает падать вниз, по траектории, задаваемой зафиксированным на своей лебедке грузоподъемным канатом 5 - сначала относительно ролика 10, а затем относительно головного блока 4 стрелы 3. При движении ковша освобождены тормоза тяговой, а затем и грузоподъемной лебедки (после про- хождения ковша точки III), при этом
обеспечивается увеличение дальности отлета ковша в зону копания, увеличивается радиус копания экскаватора.
Формула изобретения 1.Рабочее оборудование экскаватора- драглайна, включающее смонтированную на поворотной платформе стрелу с головным блоком, стрелоподъемные канаты, тяговую и подъемную лебедки, канаты которых соединены с ковшом, отличающееся тем, что, с целью расширения эксплуатационных возможностей путем увеличения радиуса копания, оно снабжено механизмом заброса ковша, а стрела выполнена из двух балок, расположенных с возможностью перемещения ковша между ними, при этом верхняя часть балок имеет ролик, располо1 женный с возможностью взаимодействия с тяговым канатом, а механизм заброса ковша выполнен из закрепленных к нижней части балок вертикальной П-образной рамы с направляющими, из расположенной в направляющих тележки, соединенной с верхней частью рамы посредством дополнительных лебедок, и из расположенного снизу тележки узла захвата тягового каната, при этом стрелоподъемные канаты закреплены в верхней части П-образной рамы, а грузоподъемный канат запасован посредством дополнительного блока, расположенного на перекладине рамы.
2.Рабочее оборудование по п. 1, о т л и- чающееся тем, что узел захвата тягового каната выполнен из подпружиненных и подвижных в вертикальной плоскости относительно тележки с возможностью охвата тягового каната челюстей, нижние концы которых расположены горизонтально с возможностью взаимного перекрытия и имеют ролики, и из механизма управления челюстями.
3.Рабочее оборудование по п. 1, о т л и- чающееся тем, что ролик выполнен в виде двух усеченных конусов, соединенных вершинами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование драглайна | 1975 |
|
SU606945A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2014 |
|
RU2570578C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭКСКАВАЦИЕЙ ГРУНТА И ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2436900C2 |
| ЭКСКАВАТОР-ДРАГЛАЙН | 2009 |
|
RU2390611C1 |
| Лебедка экскаватора-драглайна | 1980 |
|
SU899768A1 |
| ПОГРУЗОЧНЫЙ ЭКСКАВАТОР-ДРАГЛАЙН | 1994 |
|
RU2079609C1 |
| Рабочее оборудование экскаватора-драглайна | 1985 |
|
SU1247471A1 |
| СПОСОБ РАЗРАБОТКИ ГОРНО-ДОБЫЧНОГО ЗАБОЯ И КАРЬЕРНЫЙ КАНАТНЫЙ ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455427C2 |
| Сменное оборудование драглайна для канатного экскаватора "прямая лопата", содержащего напорный механизм, стрелу с головным блоком и подъемной лебедкой | 1990 |
|
SU1709026A1 |
| Рабочее оборудование экскаватора-драглайна | 1985 |
|
SU1265255A1 |

Изобретение относится к землеройной технике. Цель - увеличение радиуса копания. Оборудование снабжено механизмом заброса ковша, а стрела выполнена из двух балок 3, расположенных с возможностью перемещения ковша 8 между ними. Верхняя часть балок 3 имеет ролик в виде двух усеченных конусов, соединенных вершинами. Ролик расположен с возможностью взаимодействия с тяговым канатом (К) 7. Механизм заброса ковша 8 выполнен из вертикальной П-образной рамы 11 с направляющими 13. Тележка 14 расположена в направляющих 13 и связана с лебедками 16, закрепленными на П-образной раме 11. Снизу тележки 14 расположен узел захвата 17. Челюсти узла захвата 17 расположены с возможностью охвата тягового К 7, его удержания с помощью механизма управления и сброса. Стрелоподъемные К 6 закреплены в верхней части П-образной рамы 11. Грузоподъемный К 5 запасован через блок 12 рамы. При работе экскаватора порожний ковш 8 подтягивается к основанию стрелы и тяговый К 3 обхватывается челюстями узла захвата 17. После этого тележка 14 из нижнего положения вместе с тяговым К 7, ковшом 8 и грузоподъемным К 5 поднимается лебедками 16 в верхнее положение. При этом К 7 и 5 натянуты. С помощью механизма управления челюсти узла захвата 17 раздвигаются, освобождая К 3. Одновременно выдается тяговый К 7. При достижении ковшом 8 вертикального положения, растормаживается лебедка грузоподъемного К 5. При этом ковш 8 отлетает в зону копания на значительное расстояние. 2 з.п.ф-лы, 4 ил.
66 ю
Фиг.1
я я
7 9
Фиг. 2
Фиг.З
/1
ФигЛ
| Беркман И.Л | |||
| и др | |||
| Универсальные одноковшовые строительные экскаваторы | |||
| М.:Высшая школа, с.30 рис.31. |
