Изобретение относится к машинам с падающим грузом для разрушения материалов.
Цель - повышение надежности работы.
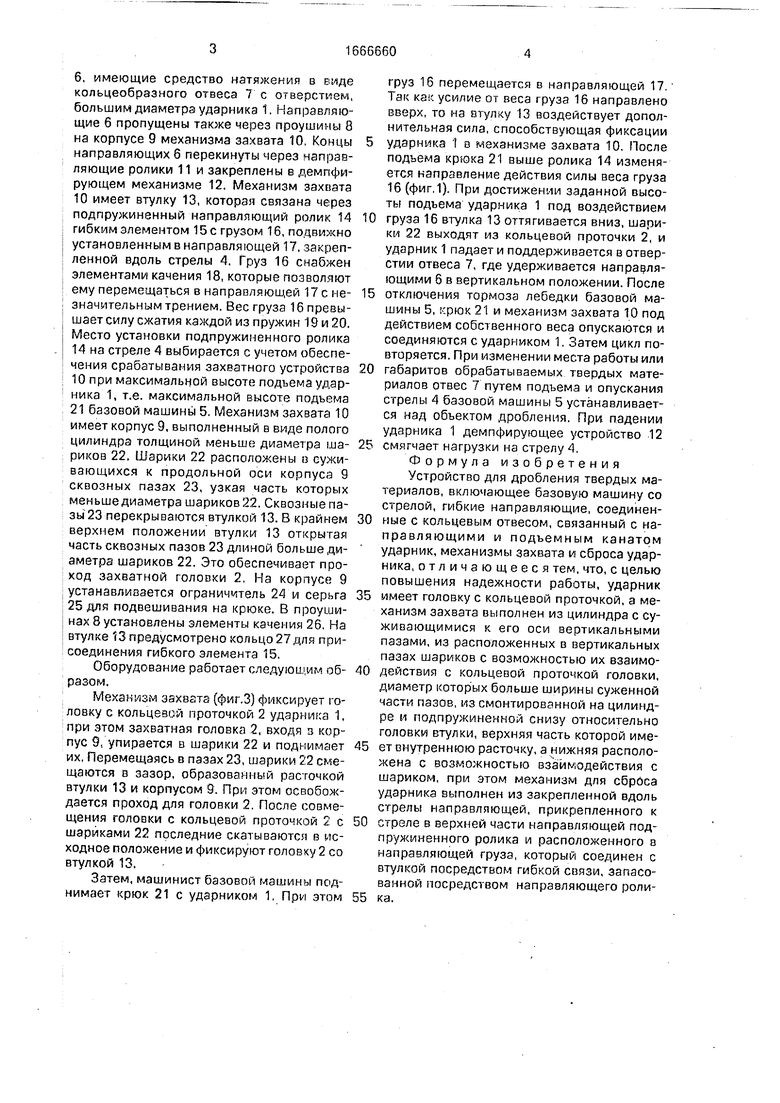
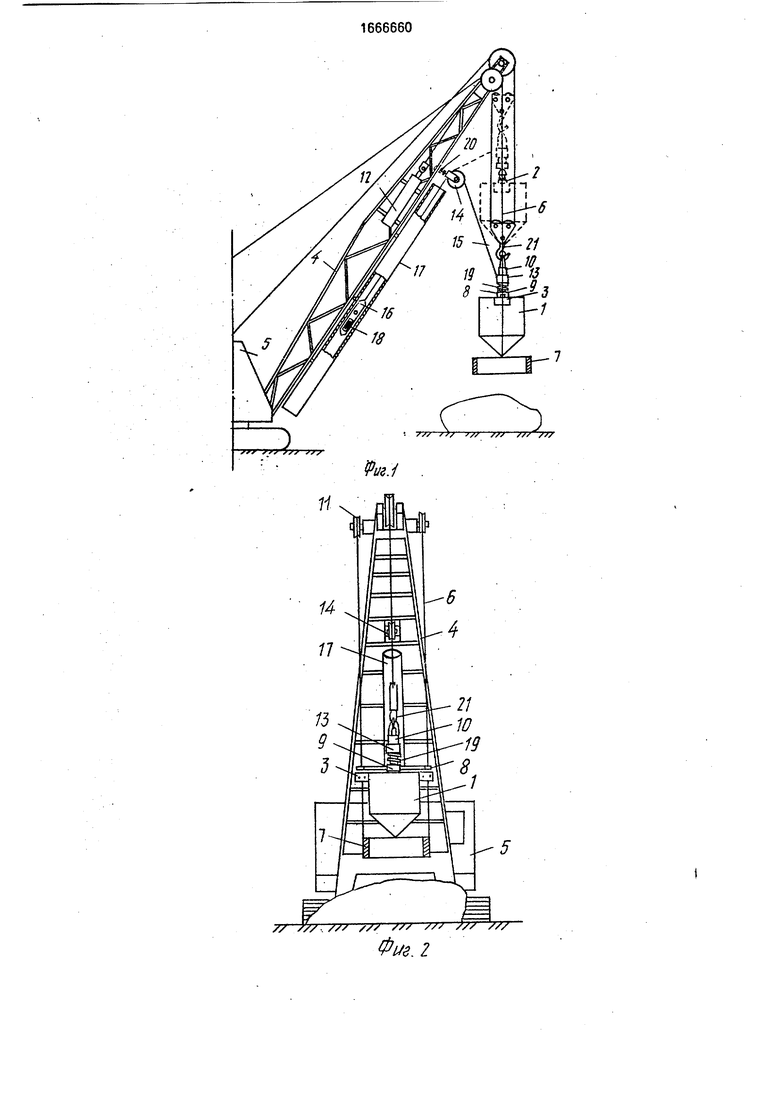
На фиг.1 изображено устройство, вид сбоку; на фиг.2 - то же, вид спереди: на фиг.З - механизм захвата с ударником, вид сбоку; на фиг.4 - разрез А-А на фиг.З; на
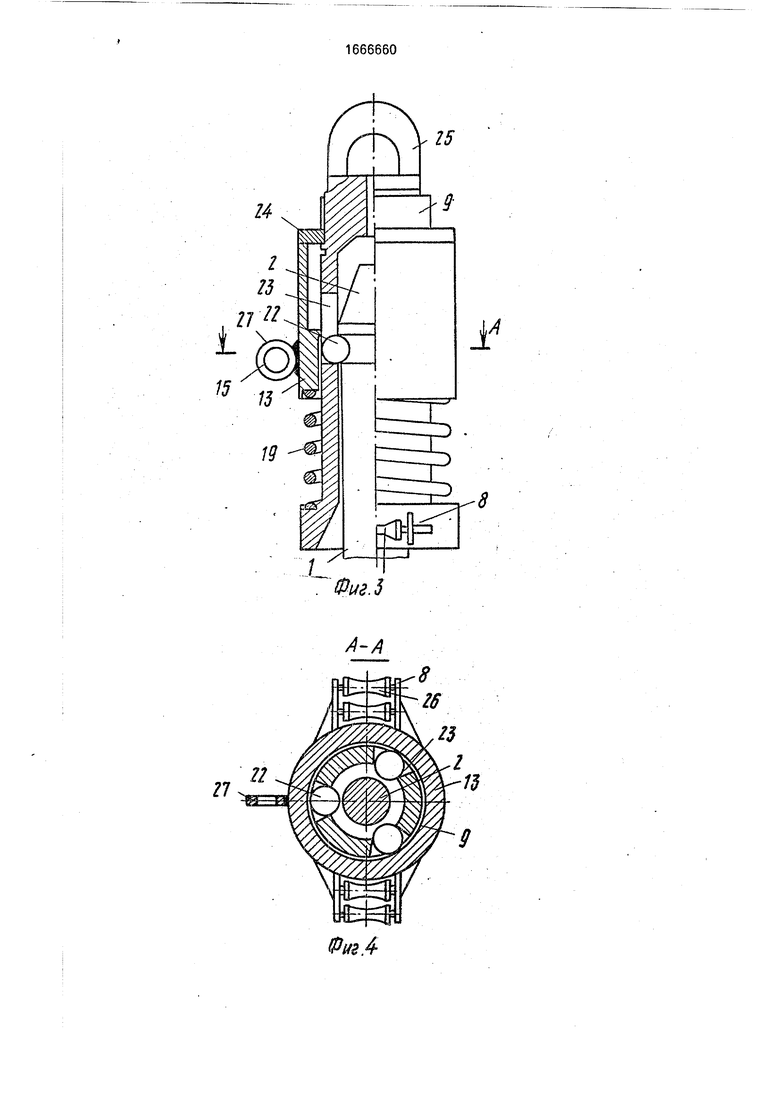
фиг.5 - то же, в момент сброса ударника; на фиг.6 - разрез Б-Б на фиг.5.
Устройство для дробления твердых материалов (фиг.1 и 2) состоит из ударника 1 с захватной головкой с кольцевой проточкой 2 и проушинами 3. Через проушины 3 пропущены вертикально подвешенные на стрелке 4 базовой машины 5 направляющие
6, имеющие средство натяжения в виде кольцеобразного отвеса 7 с отверстием, большим диаметра ударника 1. Направляющие 6 пропущены также через проушины 8 на корпусе 9 механизма захвата 10. Концы направляющих 6 перекинуты через направляющие ролики 11 и закреплены в демпфирующем механизме 12. Механизм захвата 10 имеет втулку 13, которая связана через подпружиненный направляющий ролик 14 гибким элементом 15с грузом 16, подвижно установленным в направляющей 17, закрепленной вдоль стрелы 4. Груз 16 снабжен элементами качения 18, которые позволяют ему перемещаться в направляющей 17с незначительным трением. Вес груза 16 превышает силу сжатия каждой из пружин 19 и 20. Место установки подпружиненного ролика 14 на стреле 4 выбирается с учетом обеспечения срабатывания захватного устройства 10 при максимальной высоте подъема ударника 1, т.е. максимальной высоте подъема 21 базовой машины 5. Механизм захвата 10 имеет корпус 9, выполненный в виде полого цилиндра толщиной меньше диаметра шариков 22. Шарики 22 расположены в суживающихся к продольной оси корпуса 9 сквозных пазах 23, узкая часть которых меньше диаметра шариков 22. Сквозные пазы 23 перекрываются втулкой 13. В крайнем верхнем положении втулки 13 открытая часть сквозных пазов 23 длиной больше диаметра шариков 22. Это обеспечивает проход захватной головки 2. На корпусе 9 устанавливается ограничитель 24 и серьга 25 для подвешивания на крюке. В проушинах 8 установлены элементы качения 26. На втулке 13 предусмотрено кольцо 27 для присоединения гибкого элемента 15.
Оборудование работает следующим образом.
Механизм захвата (фиг.З) фиксирует головку с кольцевой проточкой 2 ударника 1, при этом захватная головка 2, входя з корпус 9, упирается в шарики 22 и поднимает их. Перемещаясь в пазах 23, шарики 22 смещаются в зазор, образованный расточкой втулки 13 и корпусом 9. При этом освобождается проход для головки 2. После совмещения голоаки с кольцевой проточкой 2 с шариками 22 последние скатываются в исходное положение и фиксируют головку 2 со втулкой 13.
Затем, машинист базовой машины поднимает крюк 21 с ударником 1. При этом
груз 16 перемещается в направляющей 17. Так как усилие от веса груза 16 направлено вверх, то на втулку 13 воздействует дополнительная сила, способствующая фиксации
ударника 1 в механизме захвата 10. После подъема крюка 21 выше ролика 14 изменяется направление действия силы веса груза 16 (фиг,1). При достижении заданной высоты подъема ударника 1 под воздействием
груза 16 втулка 13 оттягивается вниз, шарики 22 выходят из кольцевой проточки 2, и ударник 1 падает и поддерживается в отверстии отвеса 7, где удерживается направляющими 6 в вертикальном положении. После
отключения тормоза лебедки базовой машины 5, гфюк 21 и механизм захвата 10 под действием собственного веса опускаются и соединяются с ударником 1. Затем цикл повторяется. При изменении места работы или
габаритов обрабатываемых твердых материалов отвес 7 путем подъема и опускания стрелы 4 базовой машины 5 устанавливается над объектом дробления. При падении ударника 1 демпфирующее устройство 12
смягчает нагрузки на стрелу 4.
Формула изобретения Устройство для дробления твердых материалов, включающее базовую машину со стрелой, гибкие направляющие, соединенные с кольцевым отвесом, связанный с направляющими и подъемным канатом ударник, механизмы захвата и сброса ударника, отличающееся тем, что, с целью повышения надежности работы, ударник
имеет головку с кольцевой проточкой, а механизм захвата выполнен из цилиндра с суживающимися к его оси вертикальными пазами, из расположенных в вертикальных пазах шариков с возможностью их взаимодействия с кольцевой проточкой головки, диаметр которых больше ширины суженной части пазов, из смонтированной на цилиндре и подпружиненной снизу относительно головки втулки, верхняя часть которой имеот внутреннюю расточку, а нижняя расположена с возможностью взаимодействия с шариком, при этом механизм для сбрйса ударника выполнен из закрепленной вдоль стрелы направляющей, прикрепленного к
стреле в верхней части направляющей подпружиненного ролика и расположенного в направляющей груза, который соединен с втулкой посредством гибкой связи, запасо- Е1энной посредством направляющего ролина.
N
14
Фив. 5
В-5
/J
26
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разрушения горных пород | 1987 |
|
SU1506105A1 |
| Навесное оборудование для дробления твердых материалов | 1977 |
|
SU703632A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ГРУЗОВ С УСТУПООБРАЗНЫМИ ПРОДОЛЬНЫМИ ДЕРЖАТЕЛЯМИ | 1990 |
|
RU2009100C1 |
| УСТРОЙСТВО ДЛЯ ДРОБЛЕНИЯ НЕГАБАРИТОВ | 2020 |
|
RU2751895C1 |
| Буровой снаряд и ловитель для извлекаемого пробоприемника бурового снаряда и способ применения ловителя | 1990 |
|
SU1756532A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Машина для динамического уплотнения грунтов | 1987 |
|
SU1634758A1 |
| Ударный гайковерт | 1987 |
|
SU1456305A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ГРУЗОВ | 1993 |
|
RU2072958C1 |
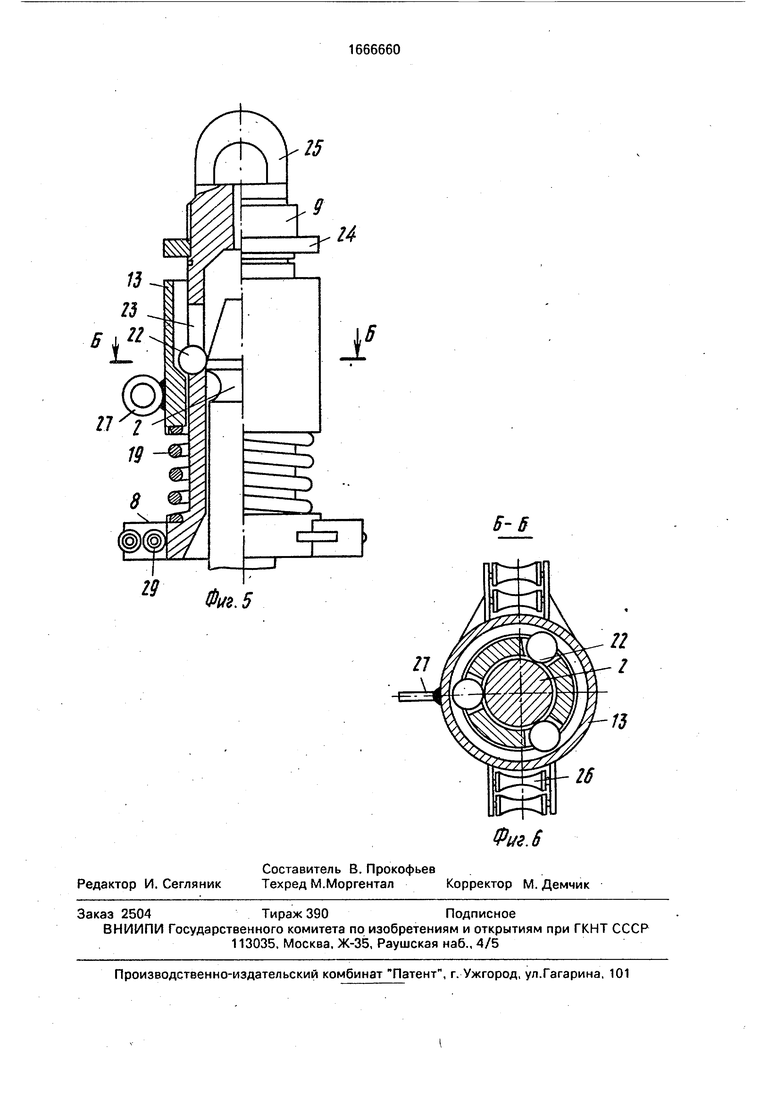
Изобретение относится к устройствам с падающим грузом для разрушения материалов. Цель - повышение надежности. Устройство содержит базовую машину со стрелой, которая имеет вертикальные гибкие направляющие с кольцевым отвесом для прохода падающего ударника. Машина имеет подъемный канат, соединенный с серьгой 25 механизма захвата, и механизм сброса. Механизм сброса содержит закрепленную на стреле направляющую с подвижным грузом, который связан канатом с кольцом 27. Ударник 1 имеет головку с кольцевой проточкой 2. Механизм захвата имеет полый цилиндр 9 с суживающимися к его продольной оси пазами 23, в которых расположены шарики 22 с возможностью взаимодействия с кольцевой проточкой 2 головки. Снаружи цилиндра 9 расположены подпружиненные пружиной 19 втулки 13. Верхняя часть втулки 13 имеет внутреннюю цилиндрическую расточку и упирается в ограничитель 24, а нижняя часть втулки 13 перекрывает шарики 22 в кольцевой проточке 2 головки ударника 1. В этом положении ударник 1 соединен с механизмом захвата. При работе ударник 1 подъемным канатом за серьгу 25 поднимается вверх. В этом положении усилие от каната 15, связанного с грузом, направлено вниз. Под воздействием усилия от каната 15 на расчетной высоте втулка 13 перемещается вниз, сжимая пружину 19, и шарики 22 выходят из проточки 2 головки, заходя в расточку втулки 13 и освобождая ударник 1, который падает вниз, разрушая материал. Захват ударника 1 обеспечивается опусканием цилиндра 9 на головку с кольцевой проточкой 2, в которую заходят шарики 22, фиксируя ударник 1 в механизме захвата. 6 ил.
| Авторское свидетельство СССР 4088993, кл.Е 02 F 5/30 | |||
| Приспособление к индикатору для определения момента вспышки в двигателях | 1925 |
|
SU1969A1 |
| Навесное оборудование для дробления твердых материалов | 1977 |
|
SU703632A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
