Фиг г
жит базовую машину со стрелой, на ко торой установлена основная и вспомогательная лебедки, На канате основной лебедки закреплена .полая верти- кальная труба 7, имеющая в верхней части упор 11 с вертикальным каналом 12, а в нижней части окна, в которых размещены установленные в средней части клещевого захвата 9 роли- ки 10. На канате 15 вспомогательной лебедки закреплен цилиндрический элемент 16 с нижней конической поверхностью. Канат 15 пропущен через вертикальный канал 12. Цилиндрический элемент 16 взаимодействует в верхнем положении с упором 1 1 , а в нижнем с роликами 10. Причем расстояние от оси роликов до центра масс цилиндрического элемента в крайнем верхнем положении составляетH gfTM/ 1 6С,м, где g - ускорение свободного падения, М - приведенная масса стрелы, кг; С - приведенная жесткость стрелы, кгс/м. 2 ил„
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для динамического уплотнения грунтов | 1987 |
|
SU1491958A1 |
| Устройство для вытрамбовывания котлованов | 1983 |
|
SU1135840A1 |
| Устройство для вытрамбовывания котлованов | 1982 |
|
SU1148952A1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН В ГРУНТЕ | 2012 |
|
RU2501930C2 |
| Устройство для уплотнения грунта | 1983 |
|
SU1135842A1 |
| Устройство для уплотнения грунта | 1988 |
|
SU1700140A1 |
| Машина для динамического уплотнения грунтов | 1987 |
|
SU1452881A1 |
| Устройство для динамического уплотнения грунтов | 1989 |
|
SU1659588A1 |
| Устройство для динамического уплотнения грунтов | 1989 |
|
SU1650874A1 |
| Устройство для уплотнения грунта | 1987 |
|
SU1470862A1 |
Изобретение относится к строительным машинам, используемым для дат намического уплотнения просадочных грунтов путем сбрасывания с высоты грузов большой массы. Цель изобретения - снижение динамических нагрузок на базовую машину. Машина для динамического уплотнения грунтов содер (Л о со 4ь 3 00
Изобретение относится к строительным машинам, используемым для дина- мического уплотнения просадочных грутов путем сбрасывания с высоты грузо большой массы.
Целью изобретения является снижение динамических нагрузок на базовую машину.
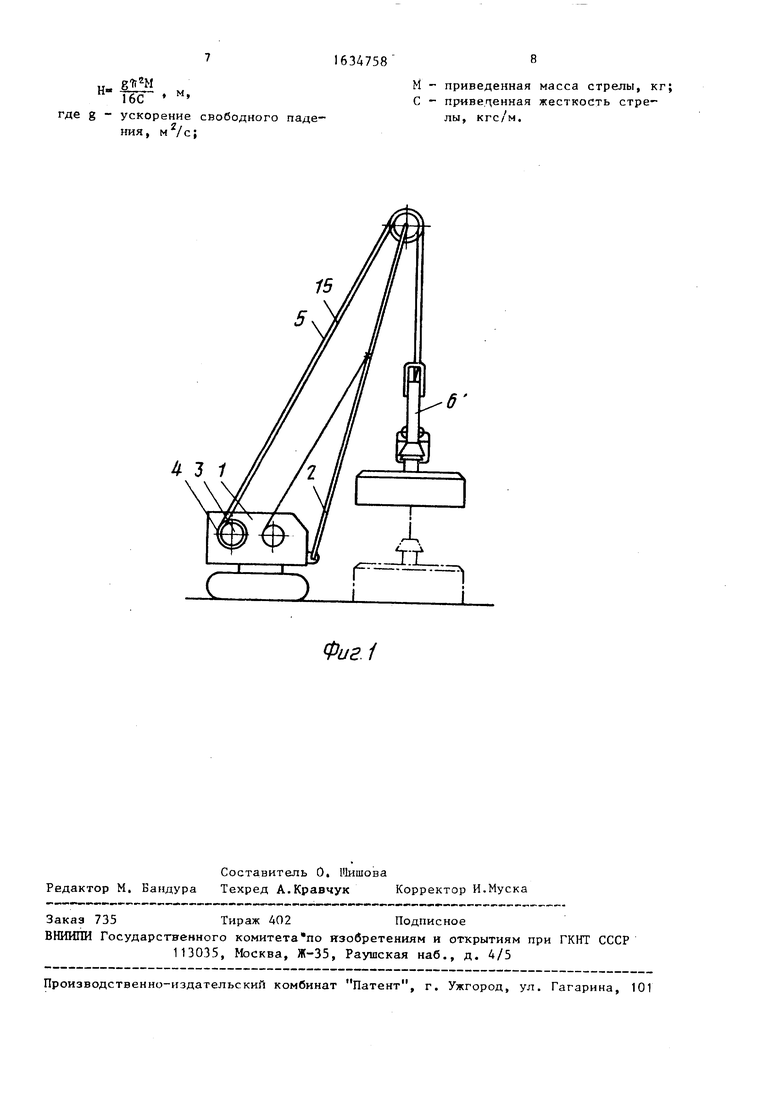
На Лиг.1 показана машина, общий вид; на Аиг.2 - сбрасывающее устройство.
Машина состоит из базовой грузо- подъемной машины 1 со стрелой 2, на которой установлены основная 3 и вспомогательная 4 Лрикционные лебедки, причем конструкция основной фрикционной лебедки 3 обеспечивает постоянную расчетную тормозную силу. Основной канат 5 соединяется с механизмом 6 сбрасывания, состоящим из трубы 7,8 с проушиной, клещевого захвата 9 с роликами 10, упора 11 с направляющим отверстием 12 и направляющими блоками 13. Снизу труба 7 имеет конический колпак 14.
Вспомогательный канат 15 соединен с цилиндрическим элементом 16 и направляется блоками 13 в направляющее отверстие 12. Трамбовка 17 имеет хвостовик 18 для центровки и бурты 19 для захвата клещами 9. Внутри трамбовки имеется отверстие 20 и амортизтор 2 1 .
Машина работает следующим образом.
Трамбовка 17, захваченная клещевым захватом 9, поднята основным канатом 5 на требуемую высоту. При этом цилиндрический элемент 16 поднят вспомогательным канатом 15 до соприкосновения с упором I1.
0
5
Q
5
Q
«с
0
Клещевой захват 9 выполнен таким образом, что груз, висящий на нем, самозатягивается, для этого ось поворота клещей несколько смещена по отношению к месту захвата груза.
Сбрасывание осуществляется машинистом путем одновременного включения Фрикционных лебедок 4 и 3.
При этом фрикционная лебедка 3 отрегулирована на постоянный тормозной момент (постоянную силу трения F)
Постоянный тормозной момент на лебедке подбирается таким, что он создает постоянную тормозную силу, работа которой на перемещении стрелы из положения ее статического равновесия без груза в положение равновесия с грузом равнялось бы разности потенциальных энергий стрелы в этих положениях.
При таком тормозном моменте поведение системы следующее. При нагруже- нии стрелы грузом происходит ее де- бормирование от веса груза и она из положения статического равновесия без груза переходит в положение статического равновесия груженной стрелы. При этом работа, совершенная грузом, накапливается в виде потенциальной энергии упругих элементов конструкции машины. После отсоединения груза грузоподъемная машина стремится вер- нуться в положение статического равновесия и выделить эту энергию. Она и будет поглощена постоянной силой трения такой величины, что ее работа на перемещение крюка в статическое равновесие грузоподъемной машины равна потенциальной энергии, накопленной при поднятии груза. Ударник 16 падает на ролики 10, разводит клещи 9,
и трамбовка 17 отделяется от механизма 6 сбрасывания и начинает свободное падение на грунт, уплотняя его.
Расстояние Н между цилиндрическим элементом 16 и рэпиками 10 рассчитывается таким образом, чтобы, когда стрела 2, начавшая движение вверх под действием сил упругости стреловых канатов -после заторможенного сбро са трамбовки 17, окажется в верхней точке своего подъема, т.е. в положении своего статического равновесия без груза, цилиндрический элемент 16 вошел во взаимодействие с роликами 10.
Вес цилиндрического элемента 16 рассчитывается таким обарзом, чтобы сила, разводящая ролики 10, могла преодолеть трение, возникающее на поверхностях контакта буртов 19 захвата хвостовика 18 груза. Величину силы трения можно регулировать разными способами (например, наклонная поверхность захвата, выполнив ее в виде по- верхности качения, и др. способами).
Цилиндрический элемент 16, разведя ролики 10, проходит сквозь них и, так как он обпадает начальной скоростью, входит в отверстие 20, соприкасается с амортизатором 21, который погашает удар по трамбовке 17 и вместе с ней и канатом 15 падает на грунт
При одновременном включении фрикционных лебедок 4 и 3 на канат воздействует постоянная сила трения F и груз летит с ускорением W, которое не равно g.
Ударник начинает свободное падение с ускорением g (так как пебедка 4 не тормозится), При этом его скорость выше скорости груза, и ударник совершает движение относительно трубы 7. Пролетев расчетное расстояние Н, цилиндрический этемент 16 воздействует на ролики 10.
После падении трамбовки 17 с цилиндрическим элементом 16 на грунт вспомогательный канат 15, проходящий через направляющее отверстие 12, лебедкой 4 натягивается и служит для наводки механизма 6 сбрасывания на хвостовик 18 трамбовки.
Таким образом, цилиндрический элемент 16 со вспомогательным канатом 15 совмещают две функции: служат для расстыковки груза с механизмом 6 сбрасывания и для автоматической наводки (центровки) механизма сбрасыва
5
0
5
0
ния на трамбовку 17 при его подъеме с грунта.
Далее машинист, растормаживая лебедки 3, опускает механизм 6 сбрасывания по канату на трамбовку Г7. Конический колпак 14 фиксируется на хвостовике 18, а клещевой захват 9 захватывает груз за бурты 19.
Цилиндрический элемент 16 лебедкой 4 поднимается из отверстия 20, проходит между роликами 10, разведя захваты 9, которые после прохождения цилиндрического элемента 16 снова захватывают груз.
Затем с помощью обеих Лебедок 3 и .4 трамбовка и цилиндрический элемент 16 поднимаются на требуемую высоту сбрасывания.
Далее цикл повторяется.
Предложенная машина проста в изготовлении благодаря простоте конструкции груза, и обеспечивает автоматический захват груза механизмом стыковки при подъеме его с грунта.
Формула изобретения
5
Машина для динамического уплотнения грунтов, содержащая базовую машину со стрелой, механизм подъема, механизм захвата, состоящий из обращенных навстречу друг другу зацепами рычагов с выступами, механизм расстыковки, выполненный в виде располо-
Q женных над выступами цилиндрического элемента с нижней конической поверхностью и трамбовки с хвостовиком, отличающаяся тем, что, с целью снижения динамических нагру-
5 3°к на базовую машину, она снабжена лебедкой, на конце каната которой закреплен цилиндрический элемент, подвешенной на канате механизма подъема направляющей трубой, выполненной в верхней части с упором для цилиндрического элемента, имеющим сквозное вертикальное отверстие, а в нижней части - с окнами, рычаги механизма захвата шарнирно закреплены на наружной поверхности трубы с размещением их выступов в ее окнах, причем расстояние Н от оси роликов до центра масс цилиндрического элемента в крайнем верхнем положении составляет
0
5
н. gfr M
Н ТАЛ м
16С
где g - ускорение свободного падения, MZ/C;
1634758 8
М - приведенная масса стрелы, кг; С - приведенная жесткость стрелы, кгс/м.
15
4 3 1
Фиг.1
б
| Устройство для уплотнения грунта | 1987 |
|
SU1560677A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
