Фиг. в
Изобретение относится к текстильному машиностроению и касается конструкции захвата подающей рапиры бесчелночного ткацкого станка.
Цель изобретения - повышение надежности в работе и уменьшение габаритов.
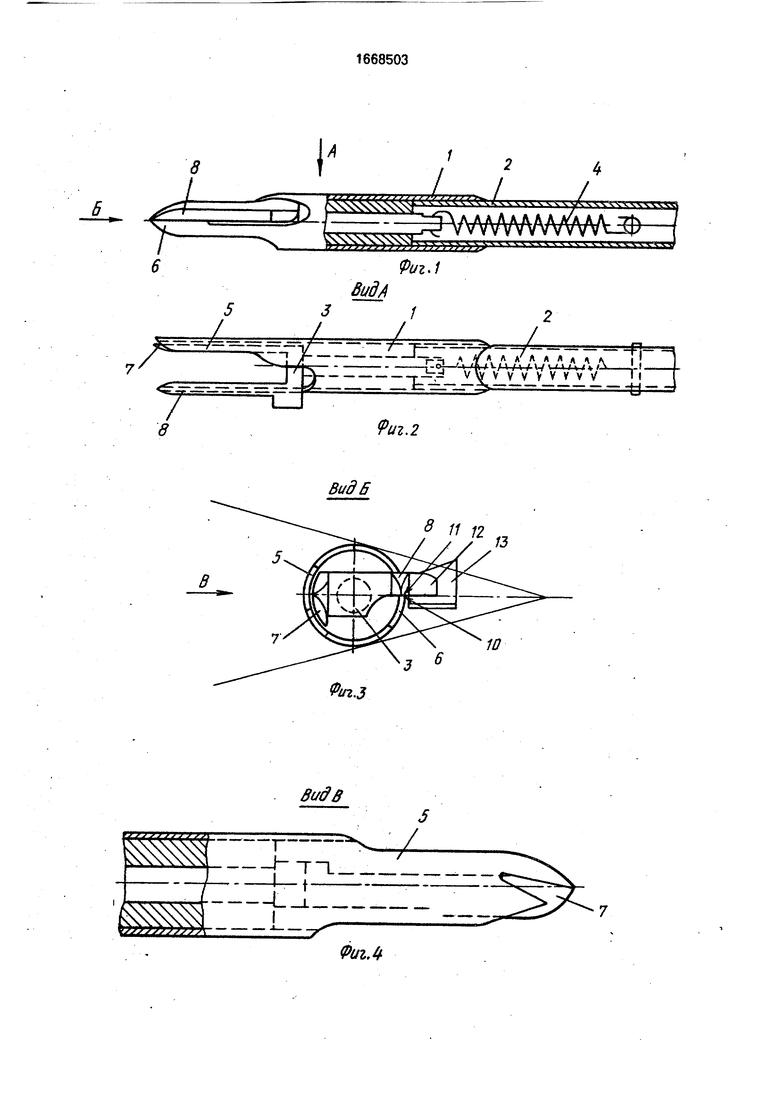
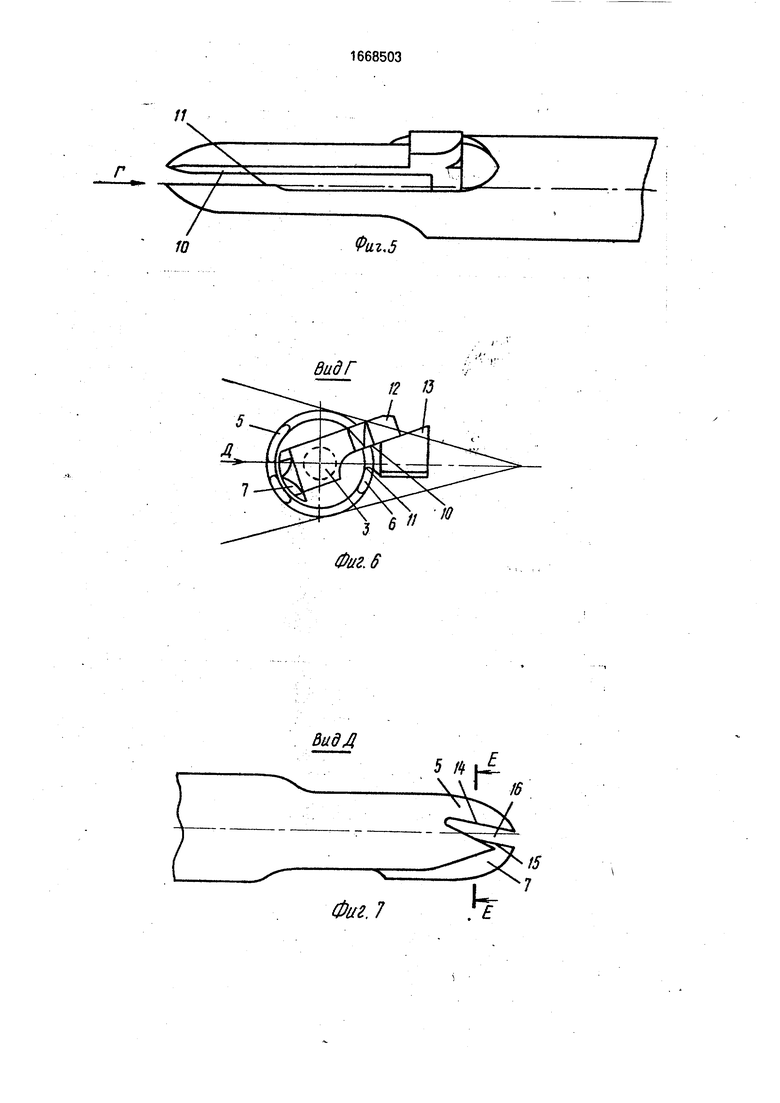
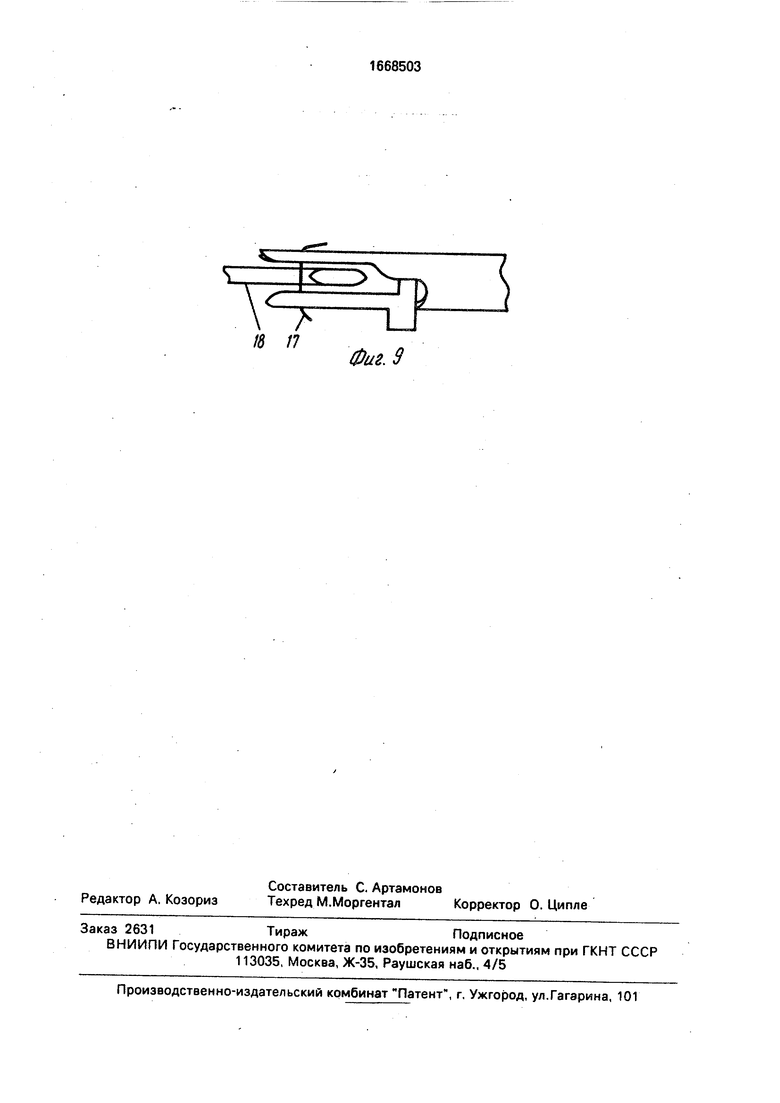
На фиг.1 изображен предлагаемый захват в закрытом положении, вид сверху с частичным разрезом; на фиг.2 - вид А на фиг.1; на фиг.З - вид Б на фиг.1, при закрытом положении захвата; на фиг.4 - вид В на фиг.З; на фиг.5 - захват в открытом положении, вид спереди; на фиг.6 - вид Г на фиг.5; на фиг.7 - вид Д на фиг.6; на фиг.8 - сечение Е-Е на фиг.7; на фиг.9 - захват в положении передачи уточной нити принимающей рапире, вид сверху.
Захват подающей рапиры содержит неподвижный зажимной элемент, выполненный в виде трубки 1, закрепленной на трубчатом корпусе 2 рапиры, и подвижный зажимной элемент 3, подпружиненный пружиной 4 к трубке 1.
Свободный конец трубки 1 вырезан с образованием ориентирующей лапки 5 и зажимной лапки 6. Подвижный зажимной элемент 3 выполнен в виде вилки с соответствующей ориентирующей лапкой 7 и зажимной лапкой 8. Вилка 3 установлена соосно с трубкой 1 с возможностью поворота относительно нее.
Зажимная лапка 8 вилки имеет участок 9, выходящий за пределы внутреннего диаметра трубки 1 для контактирования с зажимной лапкой 6 под действием пружины 4. При закрытом захвате поверхность 10 лапки 8 прижимается к поверхности 11 лапки 6 под действием предварительно закрученной в направлении прижима пружиной 4. Вилка 3 имеет выступ 12 для взаимодействия со средством ее управления, выполненным в виде горки 13, установленной на неподвижной части станка при входе рапиры в зев.
Ориентирующая лапка 7 вилки 3 установлена с кольцевым зазором по отношению к ориентирующей лапке 5 трубки 1. При открытом положении захвата между поверхностью 14 лапки 5 и поверхностью 15 лапки 7 образуется паз 16 для направления уточной нити 17.
Захват работает следующим образом.
При подходе захвата подающей рапиры к уточной нити 17, расположенной горизонтально между зевом и захватом, выступ 12 вилки 3 скользит по горке 13, и вилка 3 поворачивается относительно своей оси против действия пружины 4, образуя зазор
между поверхностью 10 лапки 8 и поверхностью 11 лапки 6.
При дальнейшем перемещении захвата к зеву уточная нить входит в паз между поверхностями 10 и 11 и в паз 16 между лапкой 5 трубки и лапкой 7 вилки. После прохождения горки 13, что совпадает с достижением нитью 17 крайнего положения в пазу 16, вилка 3 под действием закручивающейся
пружины 4 поворачивается и свободный конец уточной нити 17 зажимается между поверхностями 10 и 11 (фиг.1 и 3). При этом другой конец нити приподнимается лапкой 7 и ориентируется относительно точки зажима нити. Таким образом, уточной нити каждый раз при зажиме задается одинаковое положение и тем самым обеспечивается ее надежный захват принимающей рапирой с одинаковой длиной конца нити.
При достижении захватом подающей рапиры середины зева принимающий захват 18 входит в подающий захват под уточную нить 17, вытягивает нить из-под зажимных лапок 6 и 8 и прокладывает ее во
вторую половину зева. Затем цикл повторяется.
Предлагаемый захват подающей, рапиры обладает небольшими габаритами и надежен в работе.
Формула изобретения
Захват подающей рапиры бесчелночного ткацкого станка, содержащий неподвижный зажимной элемент, жестко закрепленный на корпусе рапиры, свободный конец которого имеет ориентирующую лапку, подвижный зажимной элемент, подпружиненный к неподвижному и установленный внутри соосно с последним с возможностью поворота, и средство управления подвижным зажимным элементом, отличающийся тем, что, с целью повышения надежности в работе и уменьшения габаритов, неподвижный зажимной элемент выполнен в виде трубки и ее свободный конец имеет зажимную лапку, а подвижный зажимной элемент выполнен в виде вилки с ориентирующей и зажимной лапками, соответствующими аналогичным лапкам неподвижного зажимного элемента,
при этом зажимная лапка вилки имеет участок, выходящий за пределы внутреннего диаметра трубки для контактирования с зажимной лапкой трубки, и выступ для взаимодействия со средством управления, а
ориентирующая лапка вилки установлена с зазором по отношению к ориентирующей лапке трубки и образует между ней и ориентирующей лапкой трубки паз для направления уточной нити при открытом захвате.
I
-HV
-1
г
i
Оэ
NJ
Сл)
10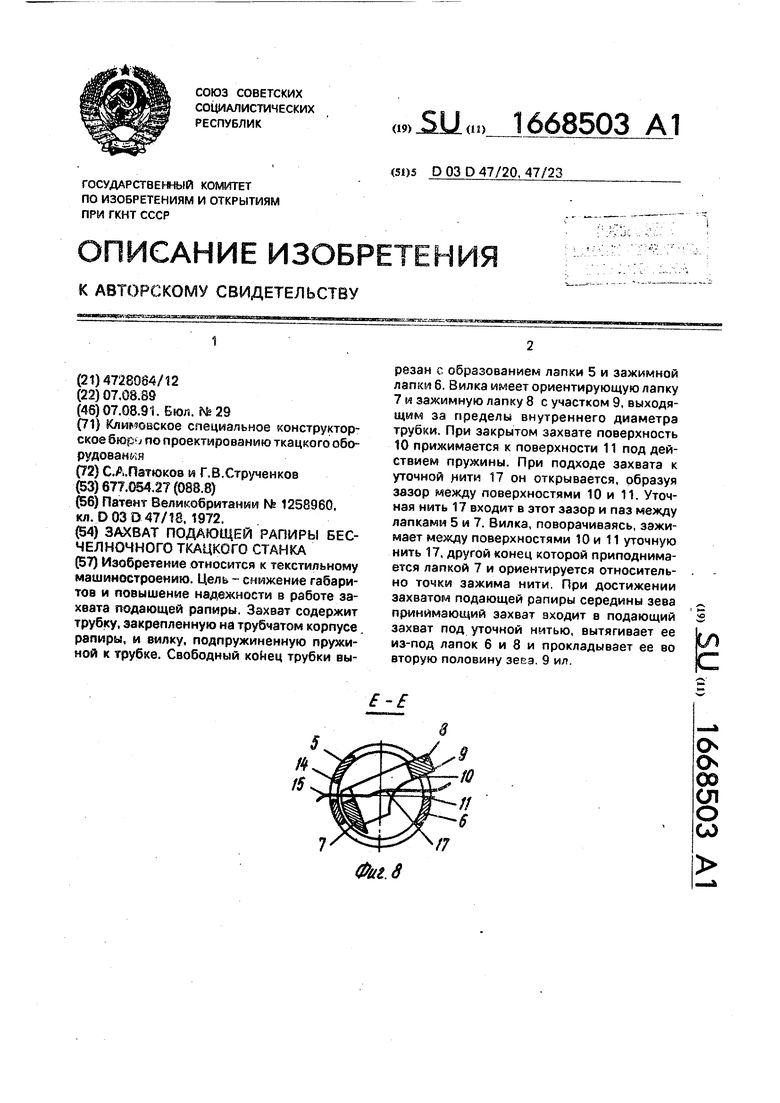

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для прокладывания уточной нити к бесчелночному ткацкому станку | 1988 |
|
SU1608260A1 |
| Устройство для прокладывания уточной нити на бесчелночном ткацком станке | 1979 |
|
SU939612A1 |
| Устройство для отрезания уточной нити бесчелночного ткацкого станка | 1989 |
|
SU1645313A1 |
| Бесчелночный ткацкий станок | 1976 |
|
SU735682A1 |
| ТКАЦКАЯ МАШИНА с ВОЛНООБРАЗНЫМИ ЗЕВАМИ вдольосновы | 1970 |
|
SU277634A1 |
| ГОЛОВКА РАПИРЫ ДЛЯ ТКАЦКОЙ МАШИНЫ | 2010 |
|
RU2501893C2 |
| Бесчелночный ткацкий станок | 1978 |
|
SU736877A3 |
| Приемный захват рапиры бесчелночного ткацкого станка | 1976 |
|
SU626707A3 |
| Захват рапиры ткацкого станка | 1977 |
|
SU742498A1 |
| БЕСЧЕЛНОЧНЫЙ ТКАЦКИЙ СТАНОК | 1968 |
|
SU207124A1 |
Изобретение относится к текстильному машиностроению. Цель - снижение габаритов и повышение надежности в работе захвата подающей рапиры. Захват содержит трубку, закрепленную на трубчатом корпусе рапиры, и вилку, подпружиненную пружиной к трубке. Свободный конец трубки вырезан с образованием лапки 5 и зажимной лапки 6. Вилка имеет ориентирующую лапку 7 и зажимную лапку 8 с участком 9, выходящим за пределы внутреннего диаметра трубки. При закрытом захвате поверхность 10 прижимается к поверхности 11 под действием пружины. При подходе захвата к уточной нити 17 он открывается, образуя зазор между поверхностями 10 и 11. Уточная нить 17 входит в этот зазор и паз между лапками 5 и 7. Вилка, поворачиваясь, зажимает между поверхностями 10 и 11 уточную нить 17, другой конец которой приподнимается лапкой 7 и ориентируется относительно точки зажима нити. При достижении захватом подающей рапиры середины зева принимающий захват входит в подающий захват под уточной нитью, вытягивает ее из-под лапок 6 и 8 и прокладывает ее во вторую половину зева. 9 ил.
ВидД
Фиг. 7
Фиг. 9
| Гидропривод управления рабочим органом землеройной машины | 1985 |
|
SU1258960A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
