рабочего органа 2 поршень ГО, -- датчика 4 перемещается вниз. Рабочая жидкость вытесняется в камеру управления Р 7. Золотник Р 7 под действием этого давления возвращается в
Изобретение относится к строи- тельному машиностроению, а именно к гидравлическим системам управления рабочими органами землеройных машин.
Цепью изобретения является повы- шение надежности гидропривода и точности управления рабочим органом.
На чертеже изображен гидропривод управления рабочим органом землеройной машины.
Гидропривод содержит силовой гид- р.оцилиндр 1 , шарнирно соединенный с рабочим органом 2 и с базовой машиной. Гидроцилиндр 1 сообщается гидромагистралями с распределителем 3. Гидроцилиндр-датчик 4 шарнирно соединен с рабочим органом и с базовой машиной. Поршневая полость гидроцилиндра-датчика 4 имеет каналы 5 для компенсации утечек рабочей жидкости, а штоковая полость соединена гидролинией с моментным гидроцилиндром бис камерой управления гидроуправ- ляемого распределителя 7, который соединен гидромагистралями с гидро- распределителем 3, насосом 8 и баком На валу моментного гидроцилиндра 6 закреплена рукоятка управления и установлен упругий элемент, например в виде спиральной пружины 9 с возмож костью постоянного поджатия в сторону рабочей полости, а на кор корпусг нанесена шкала, проградуиро- ванная в единицах линейного перемеще ния режущей кромки рабочего органа.
Гидропривод работает следующим об разом.
В нейтральных .позициях золотников распределителей 3 и 7 полости силового гидроцилиндра 1 через распредели- тель 3 сообщаются с гидроуправляемым распределителем 7, золотник которого перекрьшает полости, а гидронасос сообщает с баком и разгружает его. Лопасть моментного гидроцилинд-
нейтральную позицию и останавливает заглубление. Для продолжения заглубления необходимо продолжать поворот рукоятки управления. 1 ил.
ра 6 под действием упругого элемента оказывает давление на рабочую жидкость и это давление передается по гидролиниям управления в штоковую полость гидроцилиндра 4 и в камеру управления распределителя 7. Указанное давление создает усилие, стремящееся опустить золотник распредели теля 7 вниз, но это усилие уравновешивается силой упругости пружины, находящейся под золотником, и поэтому золотник сохраняет нейтральную позицию.
Для заглубления рабочего органа рукоятка управления-и связанная с ней лопасть моментного гидроцилиндра 6 поворачиваются оператором от себя (на чертеже по часовой стрелкеi Б рабочей полости моментного гидроцилиндра 6, гидролиниях и в камере управления распределителя 7 уменьшается давление рабочей жидкости, поэтому золотник пружиной поднимается ввер и соединяет поршневую полость силового гидроцилиндра 1 с насосом, а штоковую полость с баком. При заглублении рабочего органа поршень : гидроцилиндра-датчика 4 перемещается вниз, вытесняя рабочую жидкость в камеру управления распределителя 7, золотник которого под действием этого давления возвращается в нейтральную позицию и останавливает заглубление рабочего органа. Для продолжения заглубления необходимо продол- жать поворот рукоятки управления. Необходимая величина заглубления устанавливается по шкале, нанесенной на корпусе моментного гидроцилиндра 6, ПОСКОЛЬКУ каждому положению рукоятки управления соответствует определенное положение рабочего органа машины.
Для выглубления рабочего органа оператор поворачивает рукоятку управления на себя (на чертеже против часовой стрелки). В рабочей полости моментного гидроцштиндра 6, гидролиниях управления и камере управления распределителя 7 увеличиваетс давление рабочей жидкости, и золотник под действием этого давления, преодолевая усилие пружины, опускается и соединяет штоковую полость силового гидроцилиндра 1 с гидройа- сосом, а поршневую - с баком. При выглублении рабочего органа поршень гидроцилиндра-датчика 4 перемещаетс вверх, уменьшая давление в контуре управления, поэтому золотник рас- .пределителя 7 под действием пружины возвращается в нейтральную позицию и останавливает выглубление рабочег органа. Для продолжения выглубления необходимо продолжить поворот руко- ятки управления.
Плавакщее положение рабочего органа устанавливается перемещением вверх золотника распределителя 3, который сообщает обе полости сило- в ого гидроцилиндра 1 и гидронасос с баком. Рабочий орган свободно перемещается в соответствии с рельефом местности, а насос разгружается. При перемещении рабочего органа в плавающем режиме рукоятка управления
Редактор П.Коссей
Составитель С.Фомин
Техред Л.Сердюкова Корректор А.Зимокосов
Заказ 5098/31 Тираж 641 Подписное ВНШПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., Д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
также перемещается, повторяя движе- ния рабочего органа.
Компенсация утечек рабочей жидкости из контура управления производится через каналы 5 в поршневой полости гидроцилиндра- датчика 4 при подъеме рабочего органа в верхнее :положение. I Формула изобретения
Гидропривод управления рабочим органом землеройной машины, вклю- чакщий насос, силовой гидроцилиндр, трехпозиционный распределитель, орган его управления с поворотной рукояткой и гидроцилиндр-датчик, рабочая полость которого связана с органом управления, отличающий- с я тем, что, с целью повьшгения надежности гидропривода и точности управления рабочим органом, распределитель выполнен с гидроуправленив, а орган управления - в виде моментного гидроцилиндра, рабочая полость которого сообщена с гидроуправлением распределителя и с рабочей полостью гидроцилиндра-датчика, при этом рукоятка закреплена на валу моментного гидроцилиндра.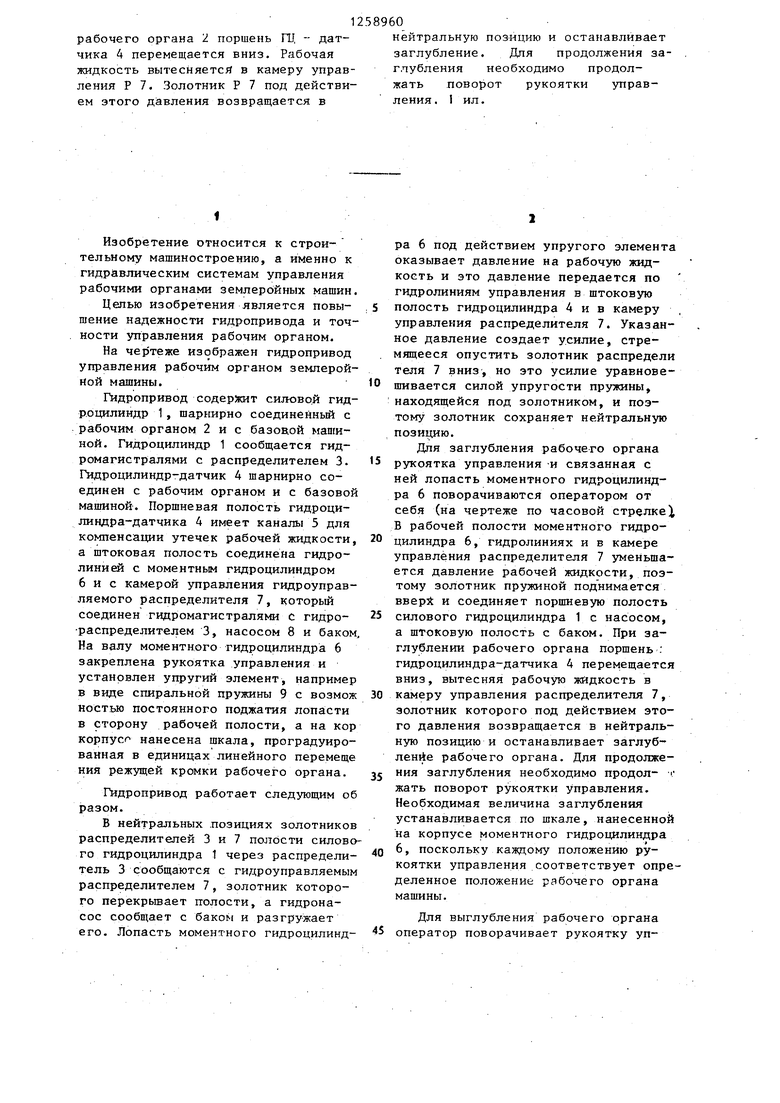
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ АГРЕГАТ | 1994 |
|
RU2091999C1 |
| Бульдозер | 1985 |
|
SU1330274A1 |
| Гидропривод фронтального погрузчика | 1983 |
|
SU1126669A1 |
| Гидросистема управления рабочим процессом бульдозера | 1983 |
|
SU1129302A1 |
| Кабелеукладчик | 1988 |
|
SU1564287A1 |
| Устройство управления рабочим органом землеройной машины | 1987 |
|
SU1463878A1 |
| Гидропривод стрелы экскаватора | 1989 |
|
SU1661479A1 |
| Гидросистема управления рабочим органом бульдозера | 1985 |
|
SU1240840A1 |
| Машина для вскрытия кюветов от снега | 1988 |
|
SU1602955A1 |
| Регулятор гидросистемы управления положением рабочего органа сельскохозяйственной машины | 1989 |
|
SU1701135A1 |
Изобретение относится к строительному машиностроению и позволяет повысить надежность гидропривода и точность управления рабочим органом. Для этого трехпозиционный распределитель (Р) 7 гидропривода выполнен с гидроуправлением и соединен гидромагистралями с Р 3, насосом 8 и баком. Орган управления гидропривода выполнен в виде моментного гидроци- ,линдра (ГЦ) 6. Рабочая полость ГЦ 6 сообщена с гидроуправлением Р 7 и с рабочей полостью ГЦ - датчика 4. На валу ГЦ 6 закреплена рукоятка управления и установлен упругий эле мент в виде спиральной пружины 9. Рабочий орган 2 машины шарнирно соединен с ГЦ-датчиком 4. Для заглу(5- ления рабочего органа 2 поворач 1ва- ют рукоятку управления и связанную с ней лопасть ГЦ 6. В рабочей полости ГЦ 6, гидромагистралях и в камере управления Р 7 уменьшается давление рабочей жидкости. Поршневая полость силового ГЦ 1 гидропривода соединяется с насосом 8, а штоковая - с баком. При заглублении I (Л °жГЪ: 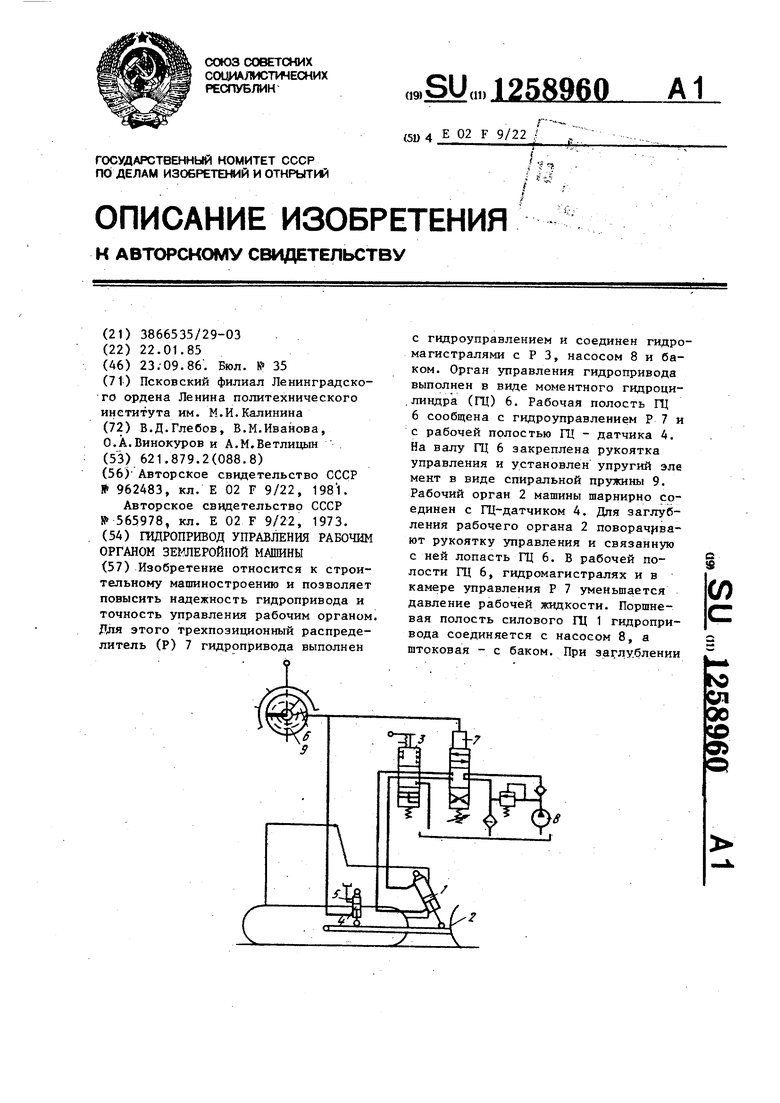
| Следящая система управления рабочим органом землеройной машины | 1981 |
|
SU962483A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система управления рабочим органом землеройно-транспортных машин | 1973 |
|
SU565978A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
