Изобретение относится к робототехнике и может быть использовано при создании захватов промышленных роботов и манипу- пнторов.
Цель изобретения - упрощение конструкции устройства и повышение надежности работы.
На фиг.1 изображена кинематическая схема захватного устройства с одним из возможных вариантов дифференциального механизма; на фиг.2 - один из возможных вариантов тормозных фиксаторов; на фит.З возможная схема блока управления.
Устройство содержит привод в виде шестерни 1, в зацепление с которой входит водило дифференциала в виде шестерни 2, жестко закрепленной на корпусе 3. В корпусе 3 размещены шестерни-сателиты 4, находящиеся в постоянном зацеплении с полуосевыми шестернями 5. На выходных звеньях - ходовых винтах 6 дифференциала расположены зажимные губки 7 и 8, на рабочих поверхностях которых размещены соответствующие датчики касания 9 и 10. выходы которых через блоки управления связаны с тормозными фиксаторами 11 винтов 6 Каждый из тормозных фиксаторов 11 содержит электрическую обмотку 12, закрепленную на механической руке манипулятора (не показана), с размещенным внутри нее подпружиненным ферромагнитным сердечником 13, на котором закреплена колодка 14, выполненная из немагнитного материала с возможностью взаимодействия с соответствующим выходным винтом 6. Губки 7 и 8 воспринимают движение от привода при помощи винтовых пар 15 и совершают захват объекта манипулирования 16.
Блок управления содержит усилители 17 и 18, входы каждого из которых подсоединены к выходам соответствующих датчиков 9 и 10. а выходы - к обмоткам электромагнитных реле 19 и 20. контакты 21 и 22 которых включены в соответствующие цепи питания параллельно подсоединенных обмоток 12 тормозных фиксаторов 11 к общему источнику питания 23.
Устройство работает следующим образом.
Крутящий момент через шестерни 1 и 2 подводится к корпусу 3. При вращении корпуса 3 начинают вращаться шестерни-сателиты 4 и полуосевые шестерни 5. вращение коюрых через винтовые пары 15 вызывает перемещение губок 7 и 8. При этом усилие распределяется равномерно на обе губки. При неточном подходе манипулятора к объекту 16 obe (упки перемещаются навстречу одна лгуои до остановки одной из них у
поверхности объекта 16. Затем до касания объекта 16 перемещается другая губка. Остановка первой коснувшейся объекта 16, например губки 7 происходит следующим
образом. В момент касания губкой 7 поверхности объекта 16 происходит срабатывание датчика 9, выходной сигнал которого через усилитель 17 подается на обмотку реле 19. контакт 21 которого замыкает цепь
0 питания обмотки 12 тормозного фиксатора
11соответствующего выходного винта 6. При этом ток, задаваемый источником питания 23, протекает полностью через обмотку
12данного фиксатора, а его величина явля- 5 ется достаточной для срабатывания последнего. Подпружиненный ферромагнитный сердечник 13 втягивается в обмотку 12, приводя к взаимодействию колодки 14 с соответствующим винтом 6 и его остановке. Тем
0 самым происходит и остановка губки .7 v поверхности объекта 16. что сопровождает; ся отсутствием усилий, действующих со стороны губки 7 на объект и способных вызвать его нежелательный сдвиг или опрокидыва5 ние. ибо функцию остановки губки выполняет не сам объект, а соответствующий тормозной узел.
В случае касания обеих губок объекта 16 происходит срабатывание датчиков 9 и 10.
0 выходне сигналы которых через усилители 17 и 18 подаются на обмотки реле 19 и 20, контакты 21 и 22 которых замыкают цепи питания обмоток 12 соответствующих тормозных фиксаторов 11. При этом ток, зада5 ваемый источником питания 23. делясь на две части, протекает через обмотки 12. При этом величина токов, протекающих через каждую из обмоток 12. является недостаточной для срабатывания тормозных фиксато0 ров и, следовательно, взаимодействие колодок 14 с винтами 6 не происходит.
В ряде случаев, учитывая возможность определенного перемещения губок в промежутке времени от начала срабатывания
5 датчика касания до полной остановки губок (например, в захватных устройствах с массивными подвижными звеньями), в качестве датчиков касания могут быть использованы датчики с выдвинутыми чувствительными
0 элементами или датчики ближней локации с релейными характеристиками. При этом датчики срабатывают до момента касания губкой поверхности объекта 16, обеспечивая необходимый путь торможения.
5Формула изобретения
1. Захватное устройство манипулятора, содержащее зажимные губки, привод их перемещения с выходными звеньями, на ко- торы , установлены губки, узел остановки зажимных губок, отличающееся тем,
что, с целью упрощения конструкции и повышения надежности работы, привод пере мещения зажимных губок выполнен в виде дифференциального механизма, а узел остановки зажимных губок выполнен в виде расположенных на рабочих поверхностях губок датчиков касания, связанных через блок управления с соответствующими тормозными фиксаторами, установленными с возможностью взаимодействия с выходны- ми звеньями дифференциального механизма.
2 Устройство по п. 1. о т л и ч а ю щ е е- ся тем что тормозные фиксаторы выполнены электромагнитными, а блок управления содержит два идентичных канала, каждый из которых выполнен в виде последовательно соединенных усилителя и коммутирующего элемента, включенного в цепь питания обмоток соответствующих тормозных фиксаторов, при этом входы усилителей связаны с соответствующими датчиками касания.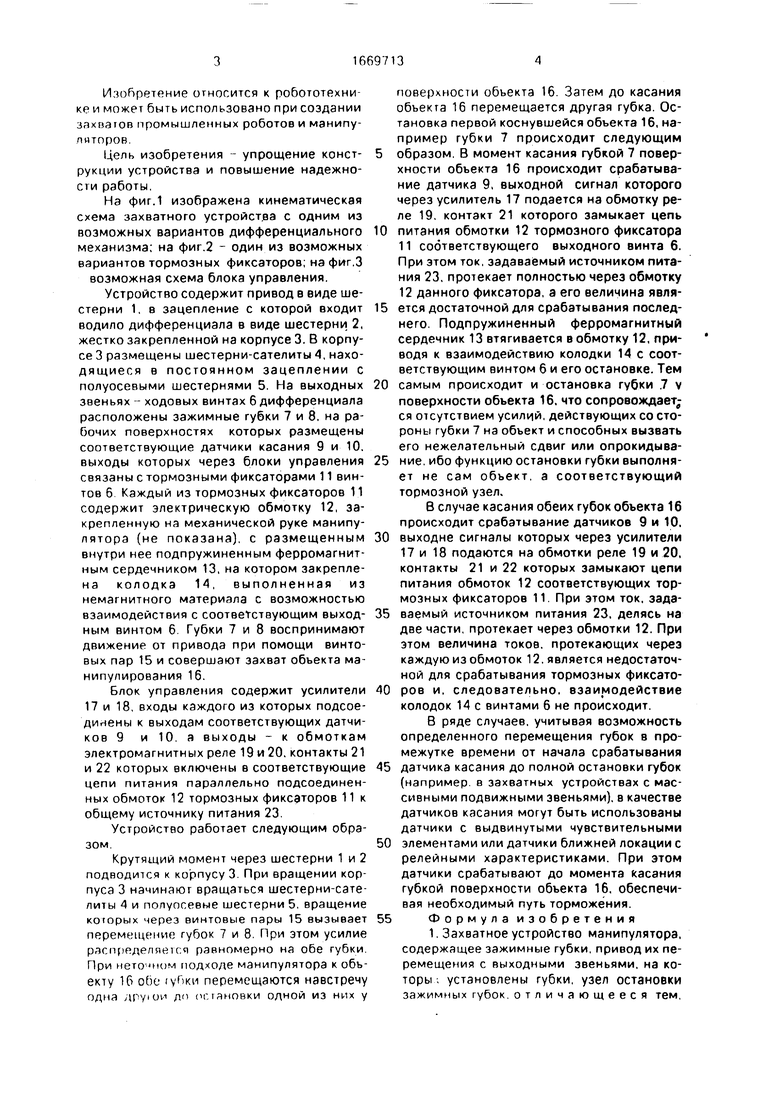
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2242655C2 |
| Исполнительный орган манипулятора | 1982 |
|
SU1131648A1 |
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2242656C2 |
| Система управления транспортного средства | 1985 |
|
SU1311954A1 |
| АВТОМОБИЛЬНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684838C1 |
| ДИФФЕРЕНЦИАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2548237C1 |
| Захват манипулятора | 1974 |
|
SU503714A1 |
| Принудительно блокируемый конический дифференциал транспортного средства | 2020 |
|
RU2731829C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 2005 |
|
RU2289519C1 |
| СБОРОЧНЫЙ УЗЕЛ БЛОКИРУЮЩЕГОСЯ ДИФФЕРЕНЦИАЛА | 2014 |
|
RU2661248C2 |
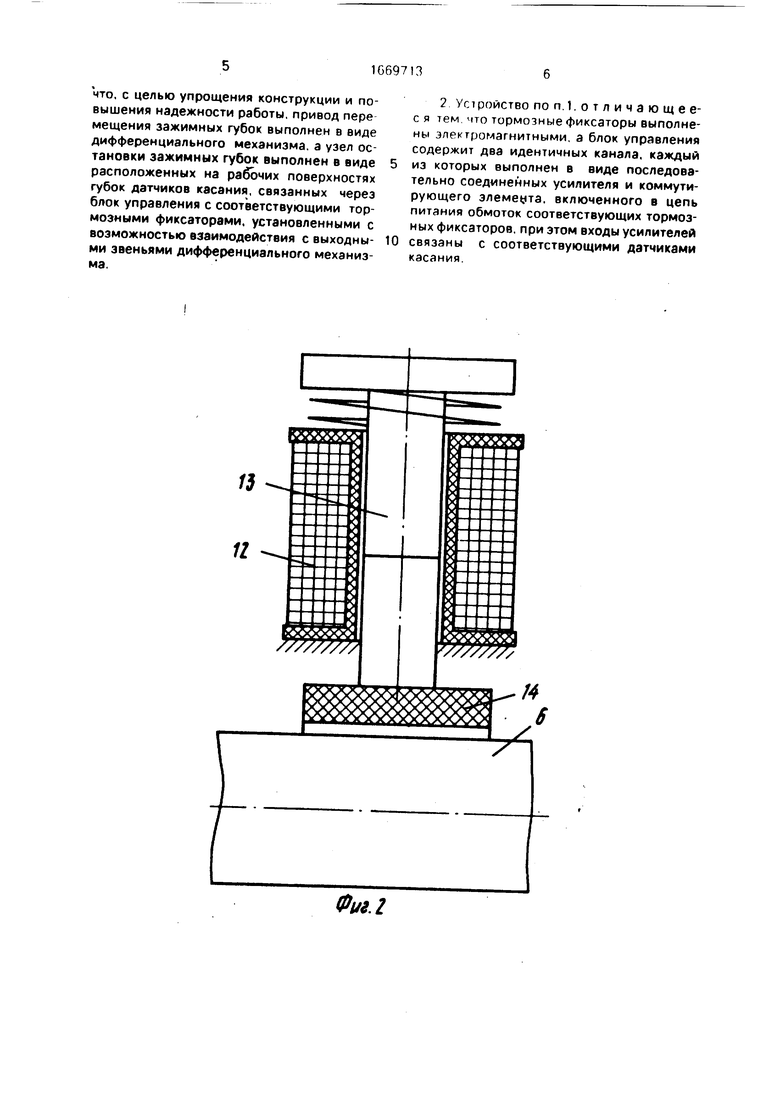

Изобретение относится к робототехнике и может быть использовано при создании захватов промышленных роботов. Целью изобретения является упрощение конструкции устройства и повышение надежности работы. Очувствленное захватное устройство содержит приводной элемент в виде шестерни 1, в зацепление с которой входит водило дифференциала в виде шестерни 2, жестко закрепленной на корпусе 3. Выходные полуоси 6 кинематически связаны с губками 7 и 8 захвата, на рабочих поверхностях которых размещены датчики касания 9 и 10, выходы которых включены в электрическую цепь срабатывания тормозных устройств 11 выходных полуосей 6. Каждое из тормозных устройств 11 содержит электрическую обмотку с размещенным внутри нее подпружиненным ферромагнитным сердечником, на котором закреплена колодка из немагнитного материала с возможностью взаимодействия с соответствующей выходной полуосью 6. 1 з.п.ф-лы, 3 ил.
/J
11
Фуг. 2
Отдатчика
бторой губки о
№7.J
| Схват | 1982 |
|
SU1060469A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
