2. Схват по п.1, о т л и ч а ющ и и с я тем, что он снабжен цилиндрами зажима,расположенными в корпусе и связанными с зажимными губками.
при этом зажимные губки подпружинены как относительно друг друга,так и относительно шток-поршней цилиндров зажима.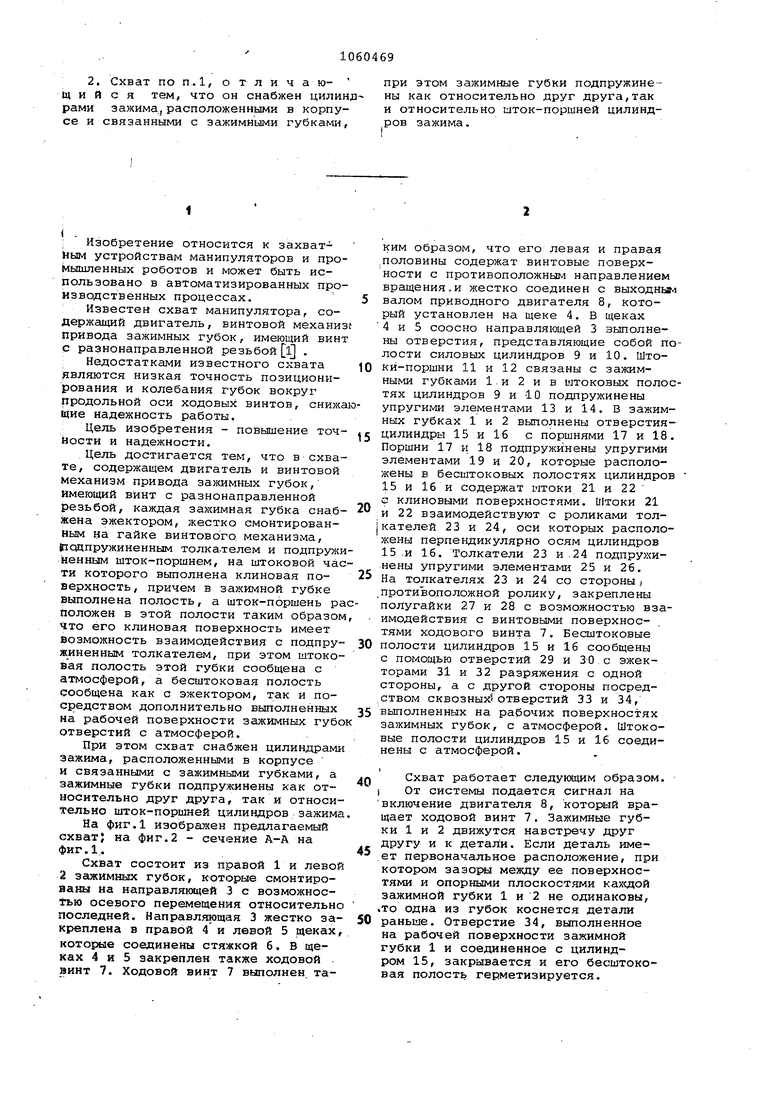
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| Автооператор | 1982 |
|
SU1057237A1 |
| Тиски | 1973 |
|
SU476154A1 |
| Люнет | 1989 |
|
SU1731577A1 |
| Устройство для вставки уплотнительных шайб в подшипник | 1987 |
|
SU1481523A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Захватное устройство | 1987 |
|
SU1414635A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Захват | 1982 |
|
SU1024270A1 |
| Схват манипулятора | 1983 |
|
SU1071421A1 |
: Изобретение относится к захватным устройствам манипуляторов и промышленных роботов и может быть использовано в автоматизированных производственных процессах.
Известен схват манипулятора, содержащий двигатель, винтовой механиз привода зажимных губок, имеющий винт с разнонаправленной резьбой ij .
Недостатками известного схвата являются низкая точность позиционирования и колебания губок вокруг продольной оси ходовых винтов, снижа |цие надежность работы.
Цель изобретения - повышение точности и надежности.
.Цель достигается тем, что в схвате, содержащем двигатель и винтовой Механизм привода зажимных губок, имеющий винт с разнонаправленной резьбой, каждая захшмная губка снабжена эжектором, жестко смонтированным на гайке винтового механизма, квдпружиненным толкателем и подпрунси1ненным шток-поршнем, на штоковой части которого выполнена клиновая поверхность, причем в зажимной губке выполнена полость, а шток-поршень ра положен в этой полости таким образом Что его клиновая поверхность имеет возможность взаимодействия с подпружиненным толкателем, при этом штоковая полость этой губки сообщена с атмосферой, а бесштоковая полость сообщена как с эжектором, так и посредством дополнительно выполненных на рабочей поверхности зажимных губо отверстий с атмосферой.
При этом схват снабжен цилиндрами зажима, расположенными в корпусе и связанными с зажимн1ьлми губками, а зажимные губки подпруяданены как относительно друг друга, так и относительно шток-поршней цилиндров зажима
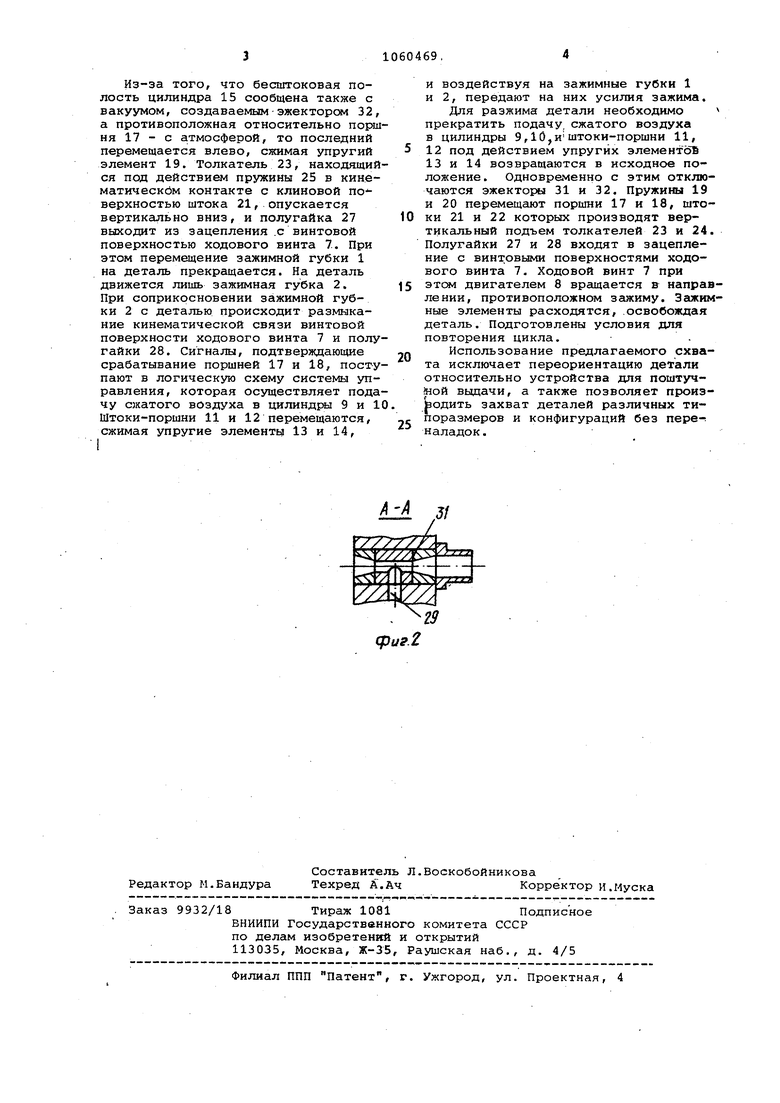
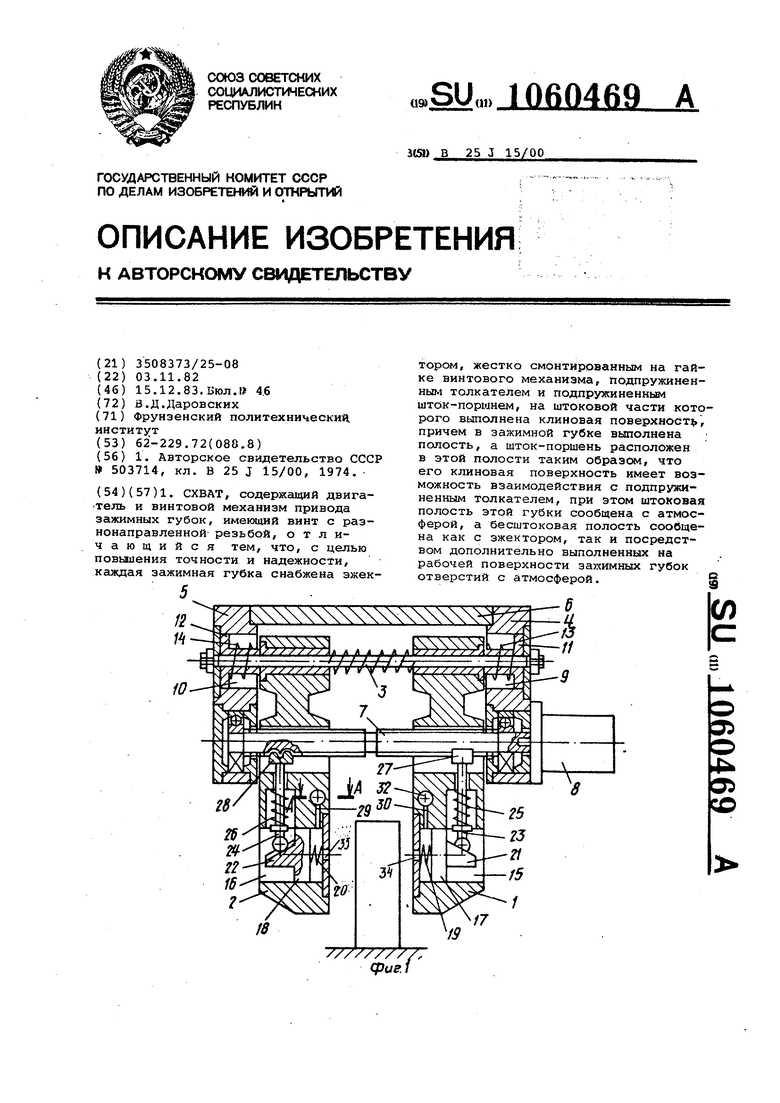
На фиг.1 изображен предлагаемый схват; на фиг.2 - сечение А-А на фиг.1.
Схват состоит из правой 1 и левой 2 зажимных губок, которые смонтированы на направлякхцей 3 с возможностью осевого перемещения относительно последней. Направляющая 3 жестко закреплена в правой 4 и левой 5 деках, соединены стяжкой 6, В щеках 4 и 5 закреплен также ходовой яинт 7. Ходовой винт 7 выполнен таКИМ образом, что его левая и правая половины содержат винтовые поверхности с противоположным направлением вращения.и жестко соединен с выходным
валом приводного двигателя 8, который установлен на щеке 4. В щеках 4 и 5 соосно направляющей 3 выполнены отверстия, представляющие собой полости силовых цилиндров 9 и 10. Што0 кй-поршни 11 и 12 связаны с зажимными губками 1.и 2 и в штоковых полостях цилиндров 9 и 10 подпружинены упругими элементами 13 и 14. В зажимных губках 1 и 2 выполнены отверстия5 цилиндры 15 и 16 с поршнями 17 и 18. Поршни 17 и 18 подпружинены упругими элементами 19 и 20, которые расположены в бесштоковых полостях цилиндров 15 и 16 и содержат штоки 21 и 22 с клиновыми поверхностями. Штоки 21 :и 22 взаимодействуют с роликами тол1кателей 23 и 24, оси которых расположены перпендикулярно осям цилиндров 15 .и 16. Толкатели 23 и.24 подпружинены упругими элементами 25 и 26.
5 На толкателях 23 и 24 со стороныj .противоположной ролику, закреплены полугайки 27 и 28 с возможностью вза имодействия с винтовыми поверхностями кодового винта 7. Бесштоковые
0 полости цилиндров 15 и 16 сообщены с помощью отверстий 29 и 30с эжекторами 31 и 32 разряжения с одной стороны, а с другой стороны посредством сквозных отверстий 33 и 34,
5 выполненных на рабочих поверхностях зажимных губок, с атмосферой. Штоковые полости цилиндров 15 и 16 соединены с атмосферой.
л Схват работает следующим образом. i От системы подается сигнал на включение двигателя 8, который вращает ходовой винт 7. Зажимные губки 1 и 2 движутся навстречу друг другу и к детали. Если деталь име5 ет первоначальное расположение, при котором зазоры между ее поверхностями и опорными плоскостями каходой зажимной губки 1 и 2 не одинаковы, .то одна из губок коснется детали
0 раньше. Отверстие 34, выполненное на рабочей поверхности зажимной губки 1 и соединенное с цилиндром 15, закрывается и его бесштоковая полость герметизируется.
Из-за того, что бесштоковая полость цилиндра 15 сообщена также с вакуумом, создаваемым эжектором 32, а противоположная относительно поршня 17 - с атмосферой, то последний перемещается влево, сжимая упругий элемент 19. Толкатель 23, находящийся под действием пружины 25 в кинематическбм контакта с клиновой поверхностью штока 21, опускается вертикально вниз, и полугайка 27 выходит из зацепления .с винтовой поверхностью ходового винта 7. При этом перемещение зажимной губки 1 на деталь прекращается. На деталь движется лишь зажимная губка 2. При соприкосновении зажимной губки 2 с деталью происходит размыкание кинематической связи винтовой поверхности ходового винта 7 и полугайки 28. Сигналы, подтверждающие срабатывание поршней 17 и 18, поступают в логическую схему системы управления, которая осуществляет подачу сжатого воздуха в цилиндрал 9 и 10 Штоки-поршни 11 и 12 перемещаются, сжимая упругие элементы 13 и 14,
и воздействуя на зажимные губки 1 и 2, передают на них усилия зажима.
Для разжима детали необходимо прекратить подачу, сжатого воздуха в цилиндры 9,10,иштоки-поршни 11,
12под действием упругих элементов
13и 14 возвращаются в исходное положение. Одновременно с этим отключаются эжекторы 31 и 32. Пружины 19 и 20 перемещают поршни 17 и 18, што0ки 21 и 22 которых производят вертикальный подъем толкателей 23 и 24. Полугайки 27 и 28 входят в зацепление с винтовыми поверхностями ходового винта 7, Ходовой винт 7 при этом двигателем 8 вращается в направ5лении, противоположном зажиму. Зажимные элементы расходятся, освобождая деталь. Подготовлены условия для повторения цикла.
Использование предлагаемого схва0та исключает переориентацию детали относительно устройства для поштучй oй выдачи, а также позволяет производить захват деталей различных типоразмеров и конфигураций без пере-;
5 наладок.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват манипулятора | 1974 |
|
SU503714A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| СХВАТ, содержащий двигатель и винтовой механизм привода зажимных губок, имекнций винт с разнонаправленной резьбой, отличающийся тем, что, с целью повьшения точности и надежности, каждая зажимная губка снабжена эжектором, жестко смонтированным на гайке винтового механизма, подпружиненным толкателем и подпружиненньм шток-поршнем, на штоковой части которого выполнена клиновая поверхности, причем в зажимной губке выполнена полость, а шток-поршень расположен в этой полости таким образсж, что его клиновая поверхность имеет возможность взаимодействия с подпружиненным толкателем, при этом штоковая полость этой губки сообщена с атмосферой, а бесштоковая полость сообщена как с эжектором, так и посредством дополнительно выполненных на рабочей поверхности за химных губок отверстий с атмосферой | |||
| (Л :О | |||
