(54) ЗАХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1978 |
|
SU770788A2 |
| Кистевой узел манипулятора | 1979 |
|
SU835734A1 |
| Захватное устройство манипулятора | 1989 |
|
SU1669713A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1131648A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Сустав манипулятора | 1980 |
|
SU944922A1 |
| Захват очуствленного манипулятора | 1978 |
|
SU709357A1 |
| Схват промышленного робота | 1986 |
|
SU1315302A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Захват манипулятора | 1978 |
|
SU768636A1 |
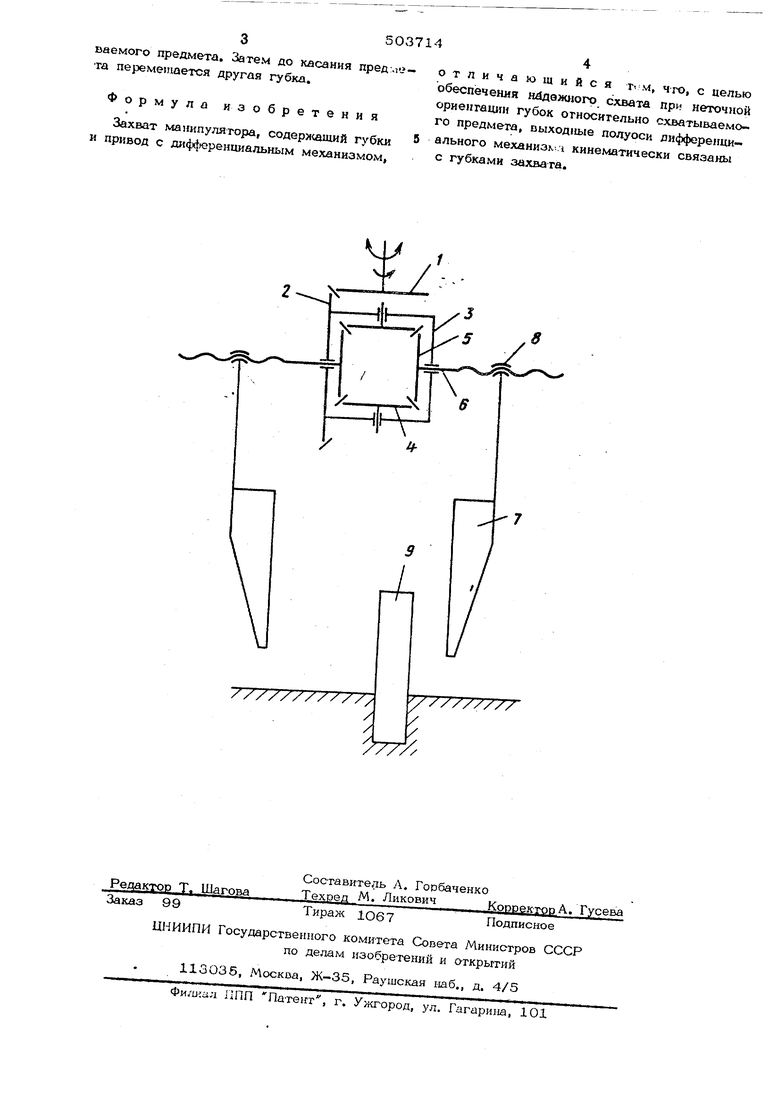
Изобретение относится к грузозахватным устройствам и может быть использовано, например, в дистанционных манипуляторах, где необходимо осуществлять точный схват предметов. Известны манипуляторы, содержащие губки и привод с дифференциальным механизмом В -таких захватах губки соверщают одновременное равное и противоположное перемещение. В случае недостаточно точного подхода дистакиионного манипу;щтора к предмету такие конструкции при схвате вызывают перекоп предмета или перексс всего манипулятора. В случае работы манипулятора в труднодоступных участках рабочей зоны одна губка захвата касается предмета, а другая в этот момент еще не доходит до него. В &ТИХ условиях без разрущеиия предмета схват вообще осуществить не удаогся. Предложенный захват отличается гем, что выходные полуоси дифференциального механизма кинематически связанм с губкам захвата. На чертеже пана кинематическая схема захвата. Захват содержит приводно) элемент в виде щестерни 1, в зацепление с которой входит водило дифференциала в виде щестерни 2, жестко закрепленной на корпусе 3. В корпусе 3 размешены щестерни-сателлиты 4, находящиеся в постоянном зацоллении с полуосевыми щестернями 5. На выходных полуосях 6 дифференциала расположены взаимодействующие губки 7 захвата. Губкн вocпpини шют двихданио, например, ири помощи двух винтовых пар 8 и совершают схват манипулируемого предмета 9. Работает следующим образом. Крутящий момент через шестерни 1 и 2 подводится к корпусу 3. Нри вращении корпуса 3 начинают вращаться щестерни-с;;п оллиты 4 и полу осевые щестерни 5, bpauio iu« которых через винтовую пару 8 Е ызы1. дет перемещениегубок 7. Нри этом усилив: распределяется равномерно на обо губк:1. Происходит схват предмета 9. При цогочло;.. подходе манипулятора к предмету обо гуГЧи перемещаются навстречу друг другу до (х:га-HOBK.li одной из 1Н1Х у иоверлности cxiv.iri.iБаемого предмета. Затем до касания предмета перемешается другая губка.
Формула изобретения
Захват манипулятора, содер;« аишй губки и привод с ди44 эренциальным механизмом.
отличающийся г м, что, с целью обеспечения нйдажяого схвата при неточной ориенгащщ губок огносигельно схватываемого предмета, выходные полуоси дифференциального механизк./ кинематически связаны с губками захвата.
