Известны механизмы управления органами резания стволообрабатывающих машин роторного типа, включающие ведундий приводной шкив и органы управления.
В иих автоматически действуюш,ая двухсторонняя связь между органами резания и механизмом разведения отсутствует.
Суш,ность изобретеиия заключается в том, что механизм управления выполнен с двухсторонней связью между органами резания и органами управления, включающей дифференниал. Дифференциал смонтирован на валу ведущего приводного шкива и снабжен механическим тормозом и шкивом, взаимодействующим с электрическим тормозом, вмонтированным в приводной шкив. Кроме дифференциала в связь входит установленный в теле ротора цилиндрический редуктор, получающий вращение от шкива дифференциала посредством, например, клиноремеииой передачи.
Органам резания редуктор передает вращение прн помощн, например, цепной передачи и упругого элемента, укрепленного на оси поворота органа резания и обеспечивающего копирование поверхности обрабатываемого ствола.
В результате таких конструктивных изменений органы резания автоматически разводятся, сводятся и создается необходимое усилие их прижатия к обрабатываемому стволу.
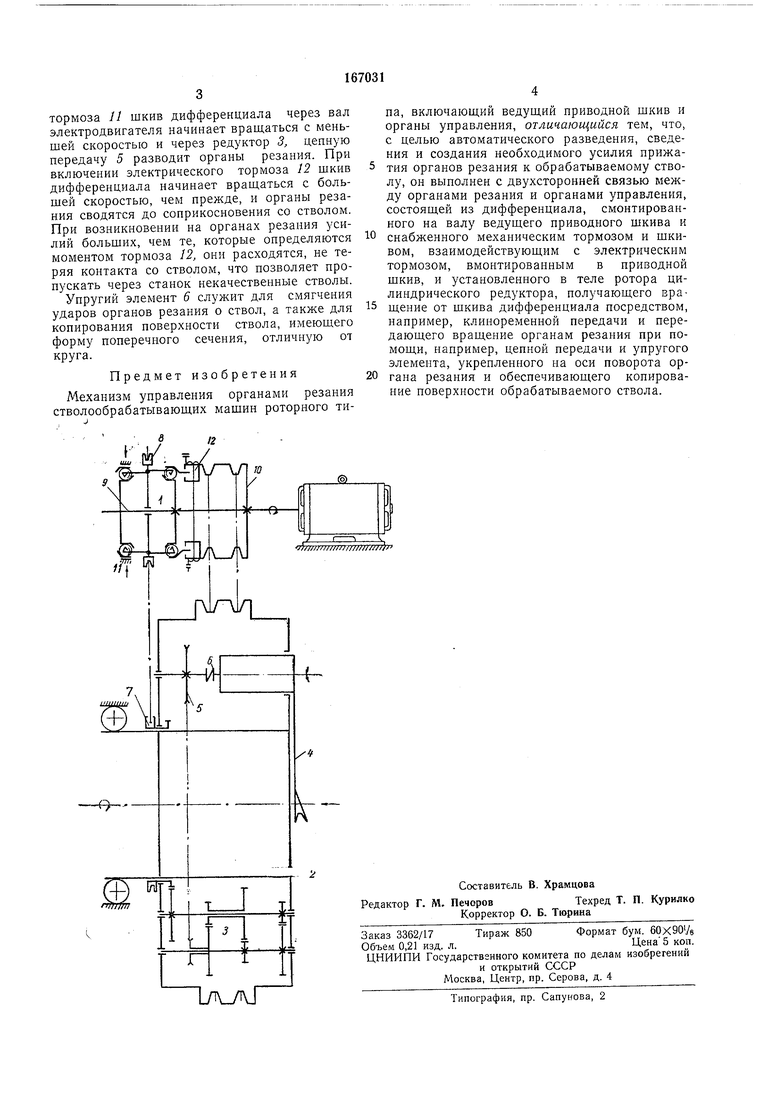
На чертеже показана принципиальная кииематическая схема механизма.
Механизм управления органами резания выполнен с двухсторонней связью, состоящей из дифференциала / и установленного в теле ротора 2 цилиидрического редуктора 5.
Одновременно ротор несет на себе органы резания 4, которые в зависимости от технологических требований могут быть сучкорезными или окорочными. Цилиидрический редуктор, с одной стороны, связан с помощью цепной передачи 5 и упругого элемента 6 с органами резания, с другой - через клиноремеиную передачу 7 со шкивом 8 диффереициала.
Дифференциал смонтироваи на валу 9 ведущего приводного шкива W и снабжен механическим тормозом 11 и шкивом, взаимодействующим с электрическим тормозом 12.
Кииематика диффереициала может быть подобрана так, что скорость тормозных шкивов механического тормоза 11 и электрического 12 может быть как угодно малой, но противоположНо направлеииой.
Электрический тормоз 12 предиазначеи для регулирования усилия прижатия органов резания к обрабатываемому стволу, а механический тормоз - для разведения органов резания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПУСКА ЦЕПНОГО ТЯГОВОГО ОРГАНА ГОРНЫХ МАШИН И ПРИВОД ЦЕПНОГО ТЯГОВОГО ОРГАНА ГОРНОЙ МАШИНЫ | 2007 |
|
RU2379507C2 |
| Станок для шпиндельной вибрационной обработки деталей в абразивной среде | 1985 |
|
SU1283058A1 |
| УСТРОЙСТВО ДЛЯ ПОДБОРКИ СЕЙСМИЧЕСКИХ КОС | 1993 |
|
RU2054701C1 |
| СПОСОБ ОБРАБОТКИ ЗЕМЛИ И АГРОМАШИНА | 2003 |
|
RU2265298C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1997 |
|
RU2146010C1 |
| СТАНОК ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ПРЯМОУГОЛЬНЫХ ПЛАСТМАССОВЫХ ИЗДЕЛИЙ | 1992 |
|
RU2015896C1 |
| ДВИГАТЕЛЬ САМОХОДНОЙ МАШИНЫ | 2010 |
|
RU2450135C2 |
| ИЗМЕЛЬЧИТЕЛЬ КОРМОВ | 1991 |
|
RU2009635C1 |
| ГУСЕНИЧНЫЙ ТРАКТОР-ТЯГАЧ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2019 |
|
RU2726350C1 |
| ОДНОШПИНДЕЛЬНАЯ СИЛОВАЯ ГОЛОВКА | 1995 |
|
RU2086386C1 |
