о
ё
ю ю
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕНЗОМЕТРИЧЕСКОЕ УСТРОЙСТВО | 1992 |
|
RU2031357C1 |
| Устройство для воспроизведения запаздывающих функций | 1985 |
|
SU1285493A1 |
| МНОГОКАНАЛЬНОЕ ТЕНЗОМЕТРИЧЕСКОЕ УСТРОЙСТВО | 2003 |
|
RU2249190C1 |
| Тензометрическое устройство | 1989 |
|
SU1793199A1 |
| Тензометрическое устройство | 1986 |
|
SU1427166A1 |
| Тензометрическое устройство с автоматической установкой нуля | 1980 |
|
SU916970A1 |
| Устройство для измерения фазовых сдвигов | 1984 |
|
SU1226341A1 |
| Устройство для градуировки датчиков силы | 1989 |
|
SU1682845A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2014 |
|
RU2566333C1 |
| Преобразователь неэлектрических величин в цифровой код | 1986 |
|
SU1501266A1 |
Тензометрическое цифровое устройство относится к области весоизмерительной техники и может использоваться при взвешивании с высокой точностью. Устройство позволяет повысить быстродействие за счет компенсации эффекта запаздывающей деформации. Повышение быстродействия достигается путем алгебраического суммирования прогнозируемой величины запаздывающей деформации с текущим значением результата измерения. Прогнозируемая величина запаздывающей деформации формируется на выходе постоянного запоминающего устройства 13, реализующего функцию, приведенную в описании изобретения. Компенсация осуществляется только при устойчивом состоянии тензомоста, которое контролируется датчиками нагрузки 10 и разгрузки 11. Блок управления 9 сигналами со своих выходов обеспечивает управление режимом компенсации и работой всего устройства. 1 з.п.ф-лы, 3 ил.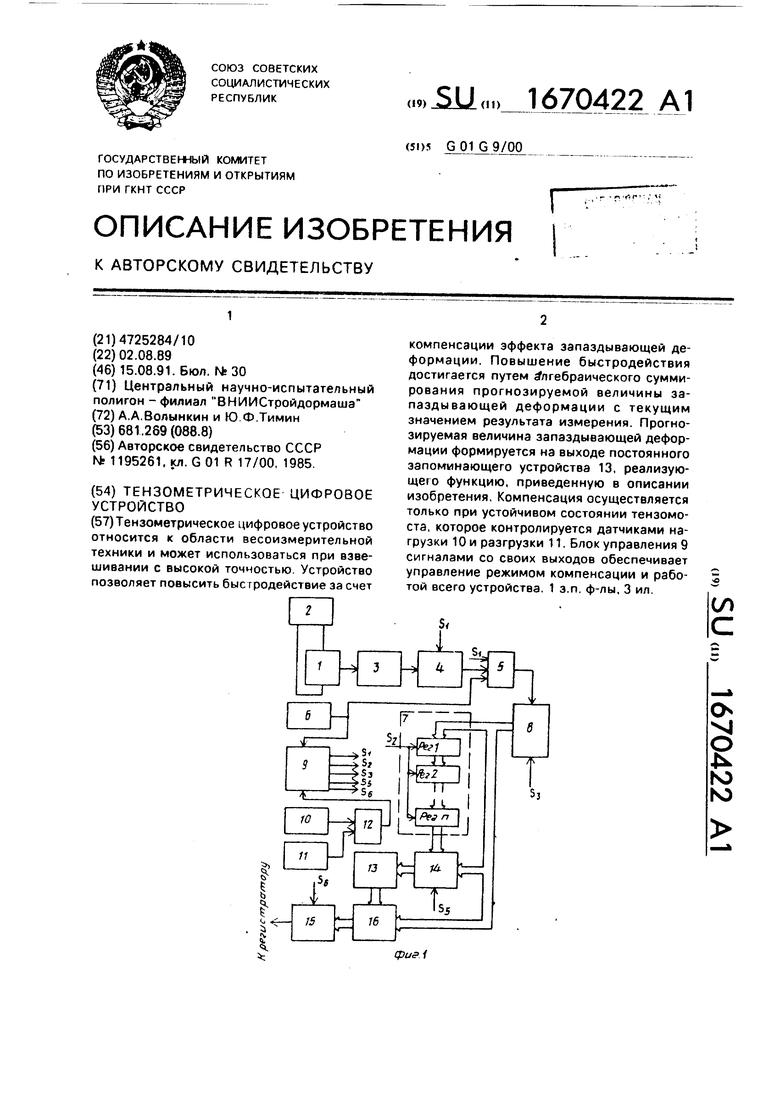
Г I
Г
Г
фие.1
Изобретение относится к весоизмерительной технике и может быть использовано в тензометрических весах при взвешивании с высокой точностью.
Цель изобретения - повышение быстродействия за счет компенсации эффекта запаздывающей деформации тензомоста.
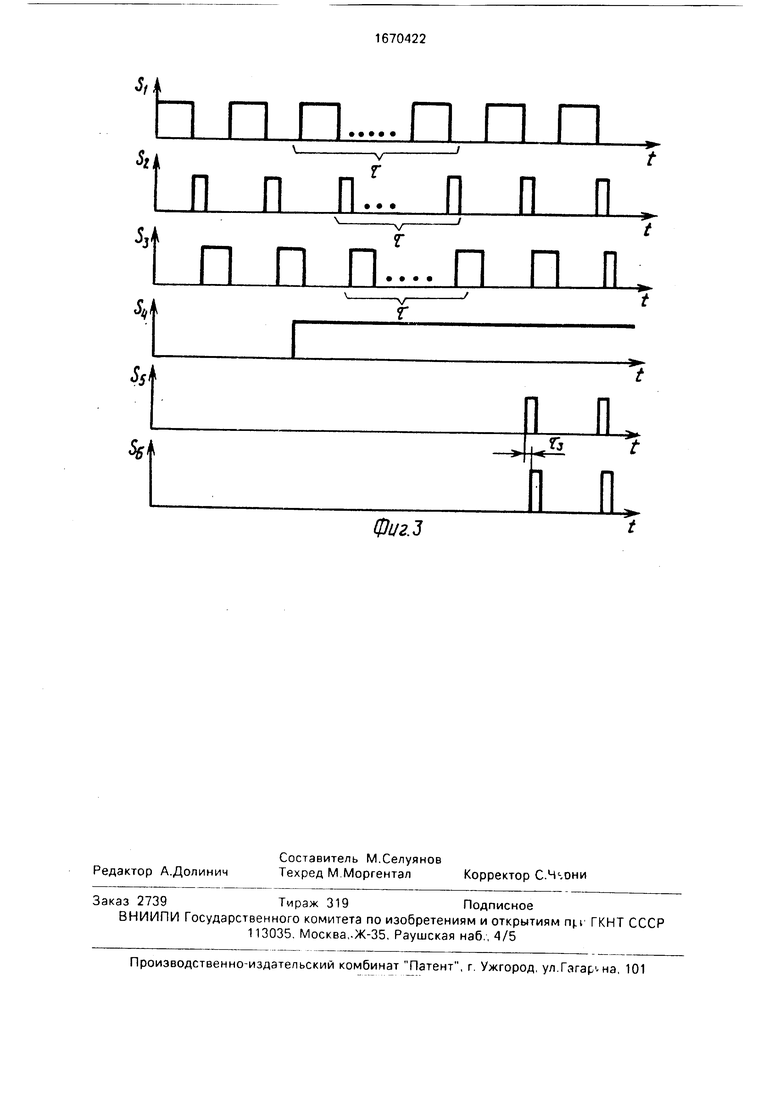
На фиг. 1 представлена функциональная схема тензометрического цифрового устройства; на фиг, 2 - блок управления; на фиг. 3 - диаграмма выходных сигналов блока 9 управления.
Схема содержит тензомост 1, источник 2 питания, предварительный усилитель 3. время-импульсный преобразователь 4, элемент И 5, генератор 6, линию 7 задержки, содержащей n-последовательно соединенных регистров, счетчик 8, блок 9 управления, датчик 10 нагрузки, датчик 11 разгрузки, элемент ИЛИ 12, постоянное запоминающее устройство 13, узел 14 вычисления разности кодов, блок 15 памяти, сумматор 16.
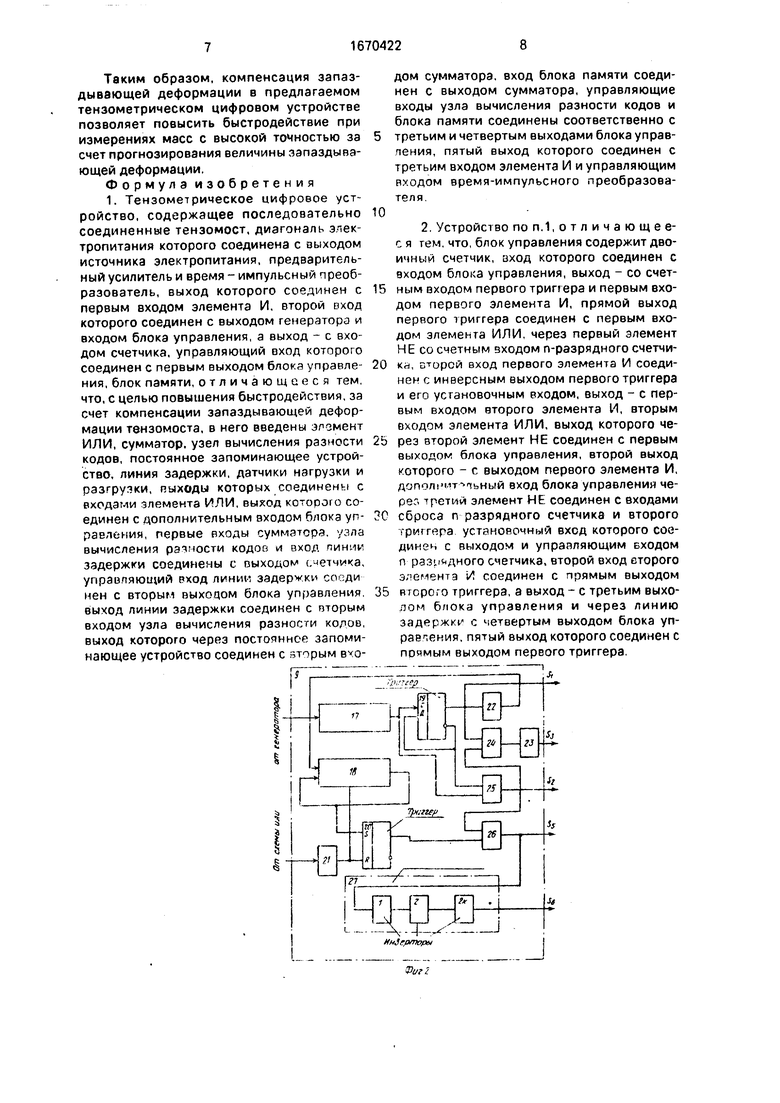
Функциональная схема блока 9 управления тензометрического цифрового устройства содержит двоичный счетчик 17, n-разрядный счетчик 18, триггеры 19 и 20. элементы НЕ 21, 22 и 23, элемент ИЛИ 24, элементы И 25 и 26 и линию 27 задержки, содержащую 2 к-последовательно соеди ненных инверторов.
Устройство работает следующим образом.
Тензомост 1 при подаче на него питающего напряжения от источника 2 питания, формирует на своем выходе напряжение ивых, пропорциональное массе измеряемого груза Миэ. Напряжение ивых. усиливается а предварительном усилителе 3 и преобразуется время - импульсным преобразователем 4 в интервал времени At, пропорциональный Миэ, при подаче на управляющий вход преобразователя 4 сигнала Si.
Совпадение на первом и втором входах элемента И 5 управляющего сигнала 1 и интервала времени Д t разрешает поступление счетных импульсов генератора 6 по третьему входу элемента И 5 на вход счетчика 8. Счетчик 8 считает число поступаемых импульсов и формирует на выходе код МИэ., соответствующий числу сосчитанных им- пульсов.
Поскольку интервал Д t пропорционален UBWK и Миз-, то код Миз на выходе счетчика 8 пропорционален МИз.
Код ,, формируемый по окончании сигнала 5 на выходе счетчика 8, поступает на вход линии 7 задержки, первые входы
узла вычисления разности кодов 14 и сумматора 16,
Нахождение тензомоста 1 в одном из устойчивых состояний (нагруженном или
разгруженном) фиксируется датчиком 10 нагрузки и датчиком 11 разгрузки, выходы которых соединены с входами элемента ИЛИ 12. Сигнал S4 с выхода элемента ИЛИ 12, сигнализирующий об устойчивом состоянии
тензомоста 1, поступая на дополнительный вход блока 9 управления, разрешает выдачу блоком 9 управпения сигналов Ss и Se.
Отсутствие сигнала Ss на управляющем входе узла 14 вычисления разности кодов
вызывает на его выходе код N0 0, который, поступая на адресные входы постоянного запоминающего устройства 13, вызывает на информационных выходах постоянного запоминающего устройства 13 код N0 0. В
результате код МИэ с, выхода счетчика 8 поступает на вход блока 15 памяти, в котором при подаче сигнала SG на управляющий вход фиксируется результат измерения массы груза Миз.
Код Ыиэ, поступаемый на вход линии 7
задержки формирует на выходе код МИз с задержкой на время г П Д ts, где п - чис- по регистр ;в в линии задержки 7; Ats время получения очередного кода ЫИз
Задержка кода Мил на время г в линии 7
задержки обеспечивается тем, что на все управляющие входы п-последовательно соединенных регистров поступает управляющий сигнал 2, который формирует блок 9
управления после окончания сигнала Si (фиг. 3). При этом по сигналу 5г код с п-1 регистра переписывается в n-ый регистр.
Через время г, после прихода весов в устойчивое состояние, блок 9 управления
выдает сигнал 5ь по которому на выходе узла 14 вычисления разности кодов формируется код Д NI.
Д N| - Низ Nmfi-n).
где i - индекс текущего значения результата
измерения;
Миз(-л) - задержанное на время значение результата измерения NM3Код , поступая на адресные входы ПЗУ 13, формирует на его информационных
выходах код ДМпр. Преобразование Д Ninp F( Д NI) происходит путем табличного соответствия определенных значений кодов ДМ| определенным значениям кодов ANinp.
Уменьшение времени измерения на
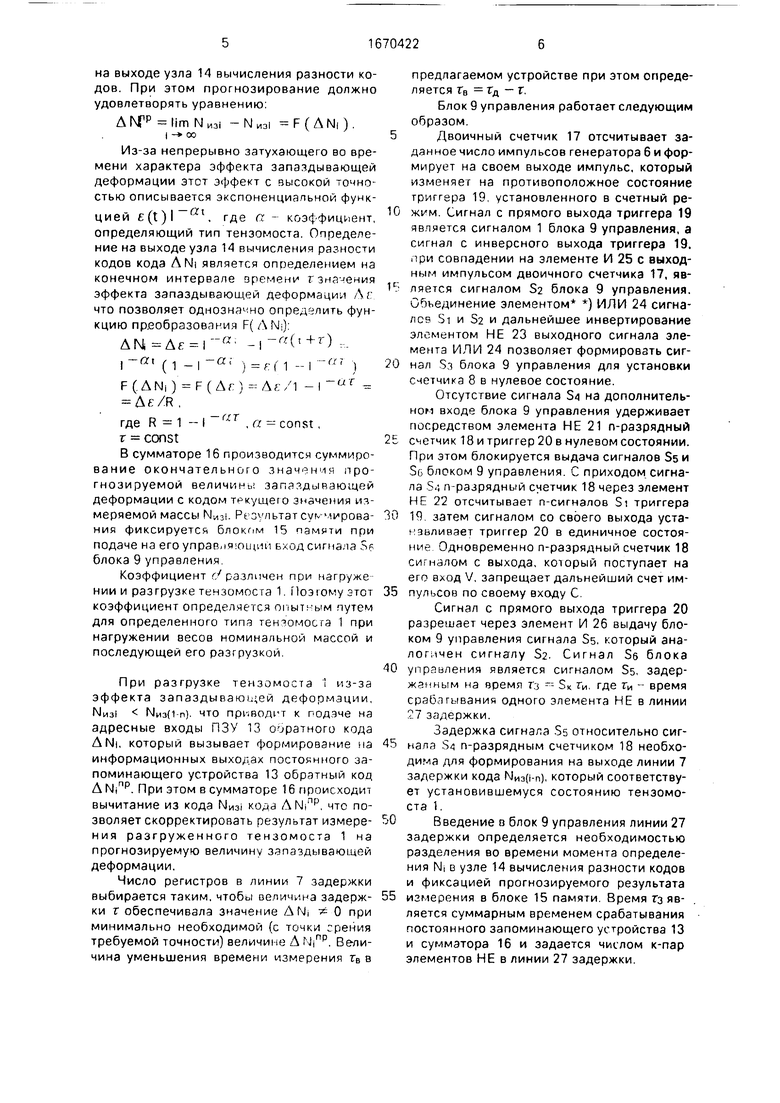
аремя влияния запаздывающей деформации в предлагаемом устройстве достигается за счет прогнозирования окончательной величины этой деформации по величине ДМ|
на выходе узла 14 вычисления разности кодов При этом прогнозирование должно удовлетворять уравнению
ЛМГр МтМиэ1 -Миэ F(ANi)
| - 00
Из-за непрерывно затухающего во времени характера эффекта запаздывающей деформации этот эффект с высокой точностью описывается экспоненциальной функцией e(t)l-0:t, где а - коэффициент, определяющий тип тензомоста Определение на выходе узла 14 вычисления разности кодов кода ЛNI является определением на конечном интервале времени г значения эффекта запаздывающей деформации Л г что позволяет однозначно определить функцию преобразования F( Л N)
-|-( +O ,-at (т | -« )f( 1 -| 1
F(ANi) F(Ar )- Af /1 -I uf - Af/R.
где R 1 - I (n , a - const,
r const
В сумматоре 16 производится суммирование окончательного прогнозируемой величина запаздывающей деформации с кодом текущего значения измеряемой массы Ыиз Pt з льтэт cvtv мирова- ния фиксируется блоком 15 памяти при подаче на его управ.ш-ощии БАОД сигнала SR блока 9 управления
Коэффициент различен пои нагруже нии и разгрузке течзомоста 1 Поэюму этот коэффициент определяв гея oi 1ЫТ1 ым путем для определенного типа тен омосгэ 1 при нагружении весов номинальной массой и последующей его разгрузкой
При разгрузке тензомоста I из-за эффекта запаздывающей деформации NM3i Nn3(i n) что приводит к подэче на адресные входы ПЗУ 13 обратного кода ANi, который вызывает формирование на информационных выходах постоянного запоминающего устройства 13 обратный код А М|Пр. При этом в сумматоре 16 происходит вычитание из кода Миз кода ЛМ|Пр что позволяет скорректировать резулотат измере- ния разгруженного тензомоста 1 на прогнозируемую величину запаздывающей деформации.
Число регистров в линии 7 задержки выбирается таким, чтобы величина задержки т обеспечивала значение AN, f- 0 при минимально необходимой (с точки срения требуемой точности) величине Л Ninp Величина уменьшения времени измерения гв в
предлагаемом устройстве при этом определяется гв Тд - г
Блок 9 управления работает следующим образом
Двоичный счетчик 17 отсчитывает заданное число импульсов генератора 6 и формирует на своем выходе импульс, который изменяет на противоположное состояние триггера 19 установленного в счетный режим Сигнал с прямого выхода триггера 19 явпяется сигналом 1 блока 9 управления, а сигнал с инверсного выхода триггера 19. при совпадении на элементе И 25 с выходным импульсом двоичного счетчика 17, является сигналом S2 блока 9 управления. Объединение элементом ) ИЛИ 24 сигналов Si и S2 и дальнейшее инвертирование элементом НЕ 23 выходного сигнала элемента ИЛИ 24 позволяет формировать сигнал S3 блока 9 управления для установки счетчика 8 в нулевое состояние
Отсутствие сигнала SQ на дополнительном входе блока 9 управления удерживает посредством элемента НЕ 21 п-разрядный
счетчик 18 и триггер 20 в нулевом состоянии. При этом блокируется выдача сигналов Ss и SG блоком 9 управления С приходом сигнала S/, n-разрядный счетчик 18 через элемент НЕ 22 отсчитывает n-сигналов Si триггера
1Я затем сигналом со своего выхода уста- зьливает триггер 20 в единичное состояние Одновременно n-разрядный счетчик 18 си-налом с выхода, который поступает на его вход V, запрещает дальнейший счет импульсов по своему входу С
Сигнал с прямого выхода триггера 20 разрешает через элемент И 26 выдачу блоком 9 управления сигнала Ss, юторый ана- логлчен сигналу S2 Сигнал Se блока
управления является сигналом Ss задер- на время гз - S ги где - время срабатывания одного элемента НЕ в линии 7 задержки
Задержка сигнала Ss относительно сигнала S n-разрядным счетчиком 18 необходима для формирования на выходе линии 7 задержки кода МИэ{|-п), который соответствует установившемуся состоянию тензомоста 1
Введение в блок 9 управления линии 27
задержки определяется необходимостью разделения во времени момента определения NI в узле 14 вычисления разности кодов и фиксацией прогнозируемого результата
измерения в блоке 15 памяти Время гз является суммарным временем срабатывания постоянного запоминающего устройства 13 и сумматора 16 и задается числом к-пар элементов НЕ в линии 27 задержки
Таким образом, компенсация запаздывающей деформации в предлагаемом тензометрическом цифровом устройстве позволяет повысить быстродействие при измерениях масс с высокой точностью за счет прогнозирования величины запаздывающей деформации.
Формула изобретения 1. Тензометрическое цифровое устройство, содержащее последовательно соединенные тензомост, диагональ электропитания которого соединена с выходом источника электропитания, предварительный усилитель и время - импульсный преобразователь, выход которого соединен с первым входом элемента И, второй вход которого соединен с выходом генератора и входом блока управления, а выход - с входом счетчика, управляющий вход которого соединен с первым выходом блока управле- ния, блок памяти, отличающееся тем. что, с целью повышения быстродействия, за счет компенсации запаздывающей деформации тензомоста, в него введены элемент ИЛИ, сумматор, узел вычисления разности кодов, постоянное запоминающее устройство, линия задержки, датчики нагрузки и разгрузки, выходы которых соединены с входами элемента ИЛИ, выход которого соединен с дополнительным входом блока уп- равления, первые входы сумматора, узла вычисления рзгюсти кодов и вход пинии задержки соединены с выходом сметчика, управляющий вход линии задержки сосди нен с вторым выходом блока управления. выход линии задержки соединен с вторым входом узла вычисления разности колов, выход которого через постояннее запоминающее устройство соединен с вторым
дом сумматора, вход блока памяти соединен с выходом сумматора, управляющие входы узла вычисления разности кодов и блока памяти соединены соответственно с третьим и четвертым выходами блока управ- пения, пятый выход которого соединен с третьим входом элемента И и управляющим входом время-импульсного преобразователя.
(pl/2.3
| Тензометрическое цифровое устройство | 1984 |
|
SU1195261A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
