15
Изобретение отяоснтся к измеритель ной технике и могсет быть использовано для измерения динамических деформаций
Цель изобретения - увеличение быстродействия за счет обработки информации в масштабе реального времени
На фиг.1 представлена блок-схема тензометрического устройства; на фиг.2 - пример выполнения блока записи и согласования; на фиг.З - пример вьшолнения блока управления.
Тензометрическое устройство содержит последовательно соединенные тен- зомост 1, первый коммутатор 2, усилитель 3, синхронньт детектор (СД) 4, интегратор 5, блок 6 управления интегратором (БУИ), счетчик 7 адреса (СА), второй коммутатор 8 и первый регистратор 9, последовательно соединенные фильтр 10 низкой частоты (ФНЧ), . блок 11 выборки и хранения (БВХ), блок 12. записи и согласования (БЗС), выход которого соединен с вторым входом второго коммутатора 8, второй регистратор 13, выполненный в виде последовательно соединенных интерфейса 14 и цифровой вьмислительной машины (ЦВМ) 15, блок 16 управления, выход которого соединен с вторыми входами БВХ 11, БЗС 12 и третьим входом второго коммутатора 8, и источник 17 питания, соединенный с входом тензо- моста 1, второй выход синхронного детектора 4 соединен с входом ФНЧ 10, выход блока 6 управления интегратором соединен с вторым входом интегратора 5, второй выход второго коммутатора 8 соединен с входом интерфейса 14, выход которого соединен с вторым входом БЗС 12 и входом БУ 16.
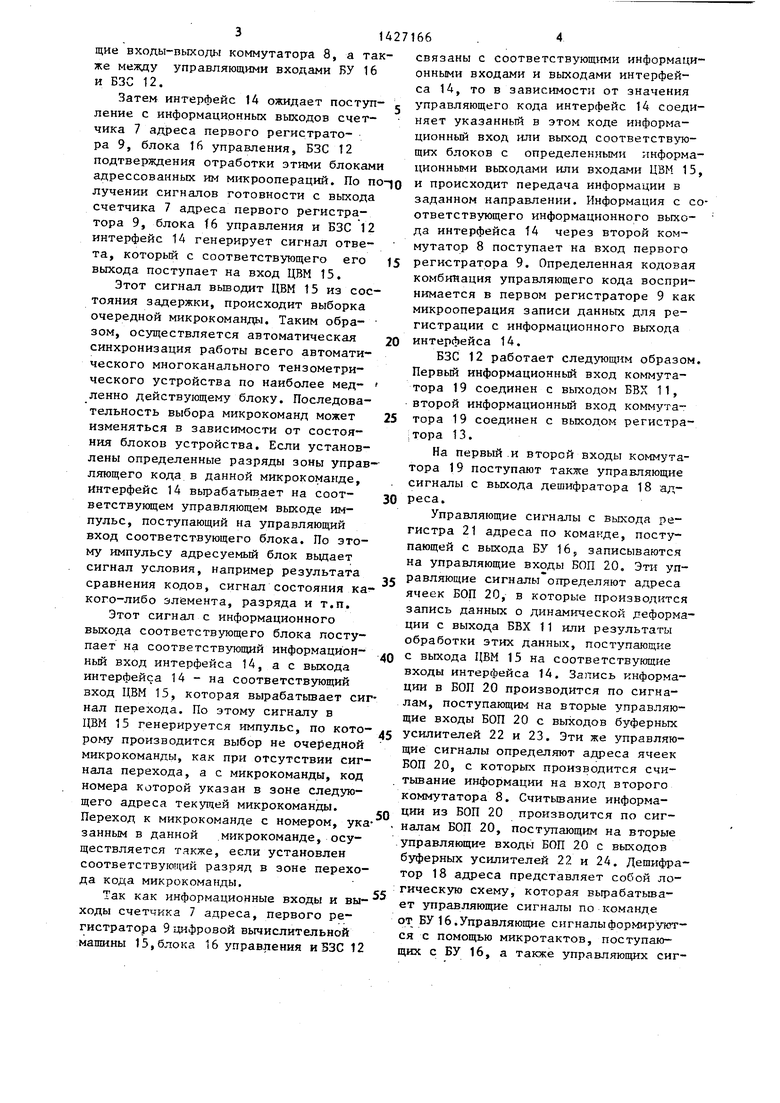
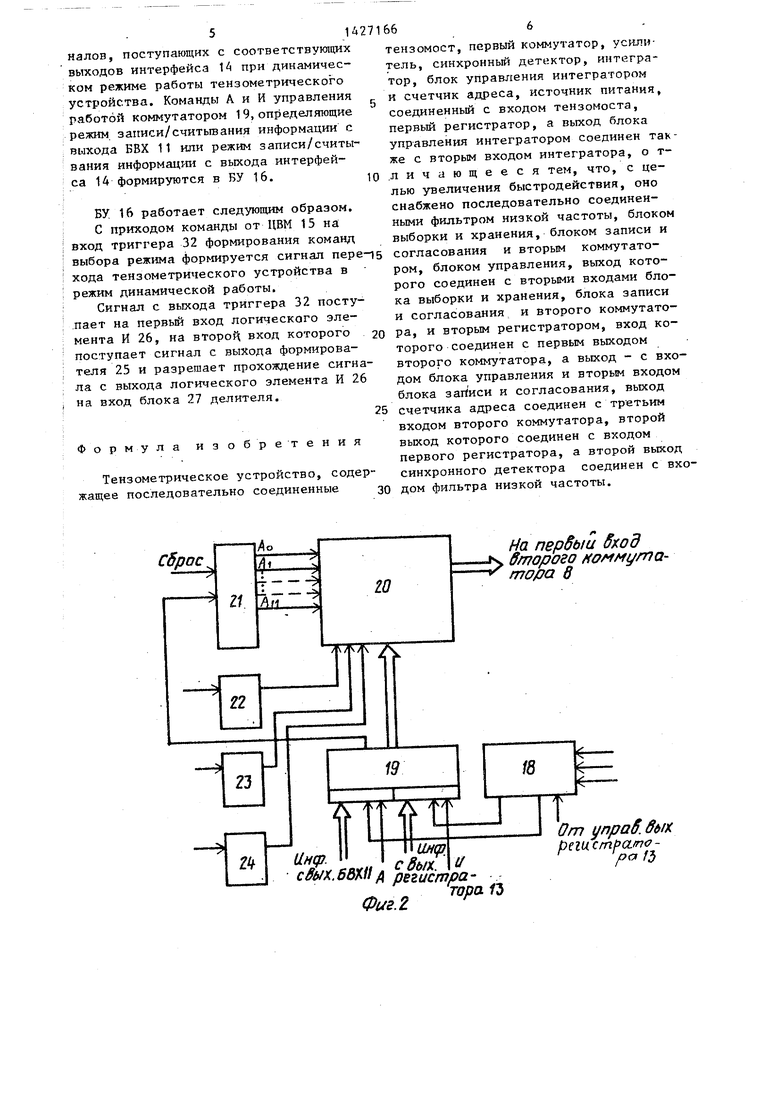
БЗС 12 содержит последовательно соединенные дешифратор 18 адреса, ком мутатор 19 и блок 20 оперативной памяти (БОП), регистр 21 адреса, выход которого соединен с входом БОП 20, а вход - с выходом коммутатора 19, и три буферных усилителя 22-24 управляющих сигналов, которые формируются в блоке 16 управления, содержащем последовательно соединенные формирователь 25, логический элемент И 26, блок 27 делителей, первую схему 28 формирования микроконтактов и логическую схему 29 формирования управляющих команд, последовательно соединенные вторую схему 30 формирования микротактов и логическую схему 31 формирования числа выборок, а также
0
S
0
5
0
5
0
5
0
5
триггер 32 форми1зования команд пыбо- рок режима.
Тензометрическое устройство работает следующим образом.
Напряжение разбаланса тензомоста 1 усиливается усилителем 3, затем поступает в СД 4, где происходит выделение полезного сигнала из модулированных колебаний. Первый выход СД 4 используется для выделения сигнала статической деформации, который поступает на вход интегратора 5, где он преобразуется в цифровую форму. БУ11 6 генерирует управляющие сигналы, которые поступают на вход интегратора 5. Двоично-десятичные коды результата измерения статической деформации и номер измеряемого канала поступают на первьй регистратор 9. Лналоговьй сигнал, характеризующий величину и характер динамической деформации, с второго выхода СД 4 по-- ступает на вход ФНЧ 10, с выхода которого сигнал поступает на вход БВХ 11, где запоминает мгновенное значение динамического сигнала, которое хранится в течение времени преобразования. Вывод информации из ББХ 11 в БЗС 12 осуществляется по команде ВУ 16.
Емкость БЗС 12, составляющая 4096 шестнадцатиразрядных слоев, позволяет производить как последовательную запись выборок нескольких измерительных каналов устройства при динамических измерениях, так и запись результатов обработки из ЦВМ 15. С выхода ЕЗС 12 информация считьшается через выходы второго коммутатора 8 либо в ЦВМ 15, либо в первьй регистратор 9.
По сигналу от счетчик 7 адреса, который через вход интерфейса 14 поступает на ЦВМ 15, происходит генерация кода первой микрокоманды выбранной микропрограмтФ.
Управляющий код с выхода ЦВМ 15 поступает на управляющий вход интерфейса 14, где на основании этого кода вьфабатываются импульсы микроопераций, например Сброс в нуль, Установка в единицу, Запись в регистр и т.п.
Интерфейс 14 в соответствии с управляющим кодом распределяет импульсы микроопераций между управляющими входами Счетчика 7 адреса и первого регистратора 9, подключенных к его управляющим выходам через соответствую31
щие входы-выходы коммутатора 8, а также между управляющими входами БУ 16 и БЗС 12.
Затем интерфейс 14 ожидает поступ- ление с информационных выходов счетчика 7 адреса первого регистратора 9, блока 16 управления, БЗС 12 подтверждения отработки этими блоками адрессованных им микроопераций. По no лучении сигналов готовности с выхода счетчика 7 адреса первого регистратора 9, блока f6 управления и БЗС 12 интерфейс 14 генерирует сигнал ответа, который с соответствующего его выхода поступает на вход ЦВМ 15.
Этот сигнал вьшодит ЦВМ 15 из состояния задержки, происходит выборка очередной микрокоманды. Таким обра- зом, осуществляется автоматическая синхронизация работы всего автоматического многоканального тензометри- ческого устройства по наиболее мед- ленно действующему блоку. Последовательность выбора микрокоманд может изменяться в зависимости от состояния блоков устройства. Если установлены определенные разряды зоны управляющего кода в данной микрокоманде. Интерфейс 14 вырабатывает на соот- ветствующем управляющем выходе импульс, поступающий на управляющий вход соответствующего блока. По этому импульсу адресуемый блок вьщает сигнал условия, например результата сравнения кодов, сигнал состояния какого-либо эл емента, разряда и т.п.
Этот сигнал с информационного выхода соответствующего блока поступает на соответствующий информацион- ньй вход интерфейса 14, ас выхода интерфейса 14 - на соответствующий вход ЦВМ 15, которая вырабатьшает сиг нал перехода. По этому сигналу в ЦВМ 15 генерируется импульс, по кото- рому производится выбор не очередной микрокоманды, как при отсутствии сигнала перехода, а с микрокоманды, код номера которой указан в зоне следующего адреса текущей микрокоманды. Переход к микрокоманде с номером, ука заннь1м в данной микрокоманде, осуществляется также, если установлен соответствующий разряд в зоне перехода кода микрокоманды.
Так как информационные входы и вы- ходы счетчика 7 адреса, первого регистратора 9 цифровой вычислительной машины 15,блока 16 управления и S3C 12
с o 5
0 5 O
Q
5
0
166 . 4
связаны с соответствующими информационными входами и выходами интерфейса 14, то в зависимости от значения управляющего кода интерфейс 14 соединяет указанный в этом коде информационный вход или выход соответствующих блоков с определенными информационными выходами или входами ЦВМ 15, и происходит передача информации в заданном направлении. Информация с соответствующего информационного выхода интерфейса 14 через второй коммутатор 8 поступает на вход первого регистратора 9. Определенная кодовая комбинация управляющего кода воспринимается в первом регистраторе 9 как микрооперация записи данных для регистрации с информационного выхода интерфейса 14.
БЗС 12 работает следующим образом. Первый информационный вход коммутатора 19 соединен с выходом БВХ 11, второй информационньй вход коммутатора 19 соединен с выходом регистра- ;тора 13.
На первый .и второй входы коммутатора 19 поступают также управляющие сигналы с выхода дешифратора 18 адреса.
Управляющие сигналы с выхода регистра 21 адреса по команде, поступающей с выхода БУ 16, записываются на управляющие входы БОИ 20. Эти управляющие сигналы определяют адреса ячеек БОП 20, в которые производится запись данных о динамической деформации с выхода БВХ 11 или результаты обработки этих данных, поступающие с выхода ЦВМ 15 на соответствующие входы интерфейса 14. Запись информации в БОП 20 производится по сигналам, поступающим на вторые управляющие входы БОП 20 с выходов буферных усилителей 22 и 23. Эти же управляющие сигналы определяют адреса ячеек ВОП 20, с которых производится счи- тьшание информации на вход второго коммутатора 8. Считывание информации из БОП 20 производится по сигналам БОП 20, поступающим на вторые .управляющие входы БОП 20 с выходов буферных усилителей 22 и 24. Дешифратор 18 адреса представляет собой логическую схему, которая вьфабатьша- ет управляющие сигналы по команде от БУ 16. Управляющие сигналы формируются с помощью микротактов, поступаю- щих с БУ 16, а также управляющих сиг514271
налов, поступающих с соответствующих выходов интерфейса 1А при динамическом режиме работы тензометрического устройства. Команды А и И управления работой коммутатором 19, определяющие режим записи/считьгеания информации с , выхода БВХ 11 или режим записи/считы ваиия информац ш с выхода интерфейса 14 формируются в БУ 16.1Q
BY 16 работает следующим образом. ; С приходом команды от ЦВМ 15 на ; вход триггера 32 формирования команд : выбора режима формируется сигнал nepe-is I хода тензометрического устройства в ; режим динамической работы.
Сигнал с выхода триггера 32 посту- .пает на первый вход логического элемента И 26, на BTOpof вход которого 20 поступает сигнал с выхода формирователя 25 и разрешает прохоткдение сигнала с выхода логического элемента И 26 на вход блока 27 делителя.
25
Формула изобретения
Тензометрическое устройство, содержащее последовательно соединенные зо
666
тензомост, первый коммутатор, усилитель, синхронный детектор, интегратор, блок управления интегратором и счетчик адреса, источник питания, соединенный с входом тензомоста, первый регистратор, а выход блока управления интегратором соединен также с вторым входом интегратора, о т- .личающееся тем, что, с целью увеличения быстродействия, оно снабжено последовательно соединенными фильтром низкой частоты, блоком выборки и хранения, блоком записи и согласования и вторым коммутатором, блоком управления, выход которого соединен с вторыми входами блока выборки и хранения, блока записи и согласования и второго коммутатора, и вторым регистратором, вход которого соединен с первым выходом второго коммутатора, а выход - с входом блока управления и вторым входом блока зайиси и согласования, выход счетчика адреса соединен с третьим входом второго коммутатора, второй выход которого соединен с входом первого регистратора, а второй выход синхронного детектора соединен с вхдом фильтра низкой частоты.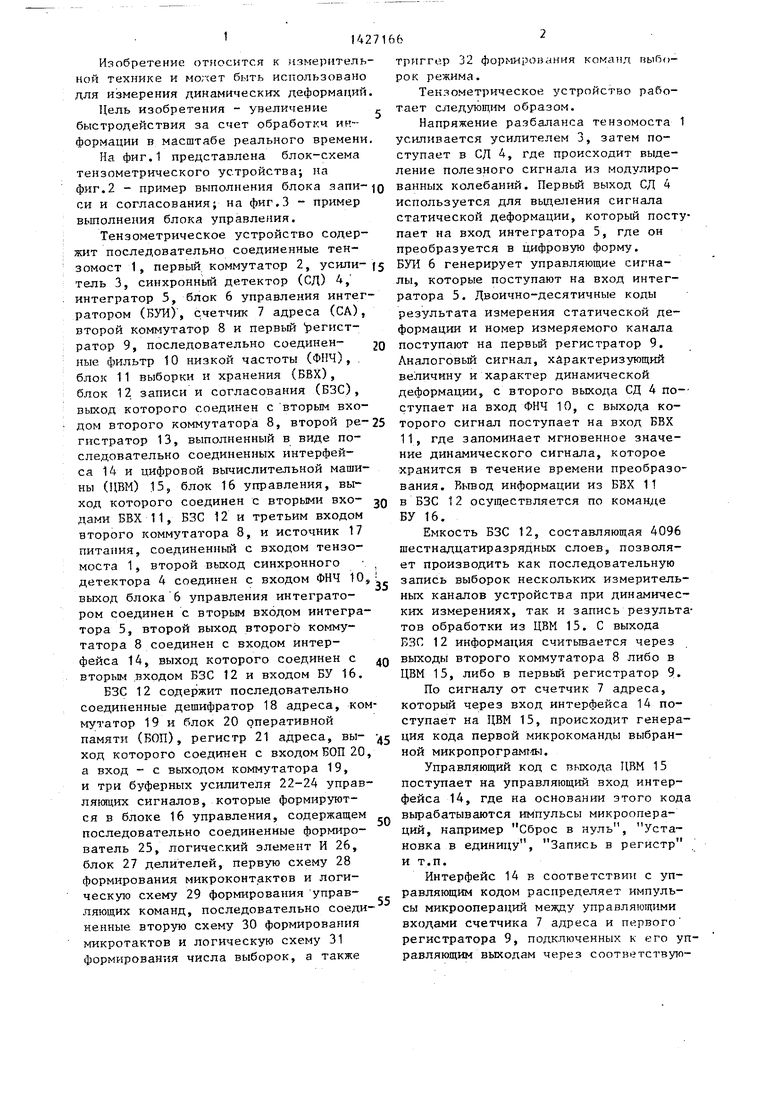
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сопряжения цифровой вычислительной машины (ЦВМ) с абонентами | 1985 |
|
SU1298762A2 |
| Микропрограммное устройство для управления и обмена данными | 1983 |
|
SU1129601A1 |
| Микропрограммное устройство для приоритетного обслуживания группы абонентов | 1984 |
|
SU1302277A1 |
| Автоматическое многоканальное тензометрическое устройство | 1980 |
|
SU932213A1 |
| Устройство для обмена информацией | 1982 |
|
SU1118992A1 |
| Микропрограммное устройство управления | 1985 |
|
SU1275442A1 |
| Микропрограммный процессор | 1981 |
|
SU980095A1 |
| Устройство микропрограммного управления | 1984 |
|
SU1226453A1 |
| Устройство для отладки программ | 1990 |
|
SU1709320A1 |
| Устройство адресации многопроцессорной вычислительной машины | 1983 |
|
SU1129613A1 |
Изобретение относится к измерительной технике и может быть использовано для измерения динамических деформаций. Целью изобретения является увеличение быстродействия за счет обработки информации в масштабе реаль ного времени.Устройство имеет второй канал измерения,который выполнен в виде последовательно соединенных ФНЧ 10, БВХ 11 и БЭС 12. БВХ 11 осуществляет преобразование аналог-код при быстро меняющихся деформациях, а также производит выборку и запоминание в заданное время уровни аналогового сигнала и сохранения его на время преобразования этого уровня в код. БЗС-12 используется как для трения текущих данных о величине и характере динамической деформации, полученных в БВХ 11 fr цифровой форме, так и для передачи результатов обработки этих данных с выхода ЦВМ 15 для регистрации ее в первом регистраторе 9. Управление работой устройства осуществляется через БУ 16 по командам, поступающим от ЦВН 15. Алгоритм обработки результатов измерения динамического процесса, как и выбор режима измерения, задается программно. 3 ил.. и а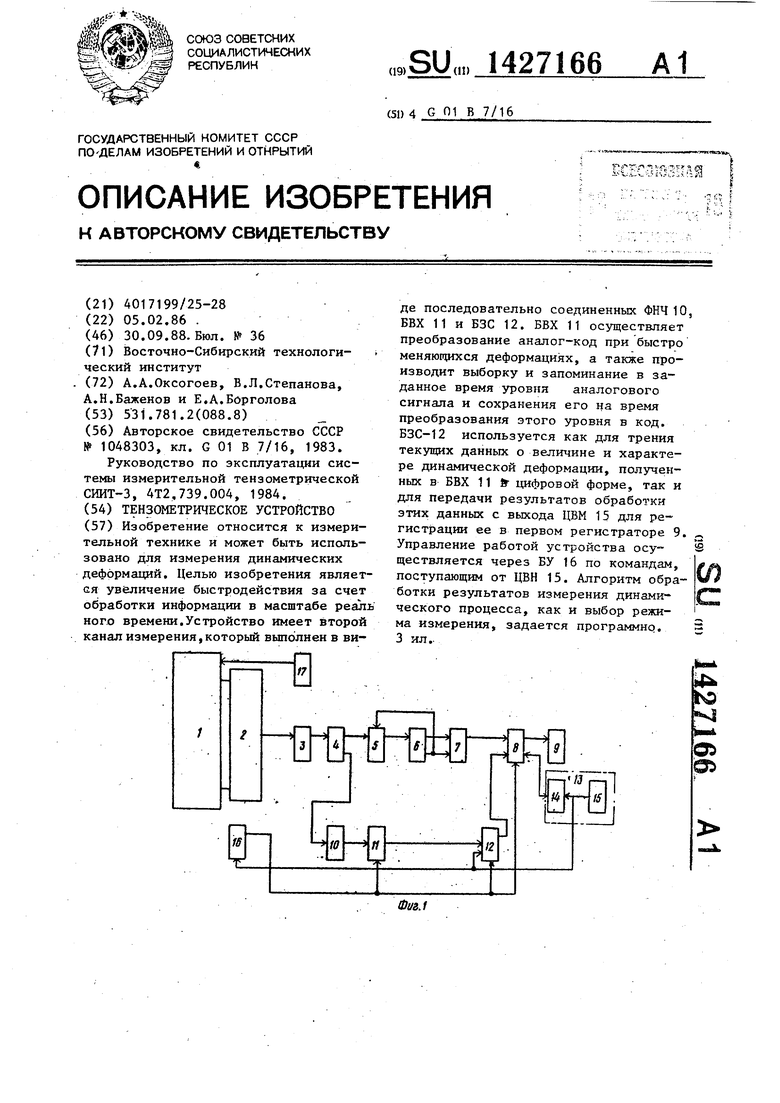
Сброс
с дык.
I/
.55Х//х) регистратора
На пербыи бкод -J omoposo но мита- тора 6
От ynpaS. вш
t)(iucmf a.
//х) регистраФиг.2
тора f 3
Ц . 59
VJ . 4
LLLJLU
Ц . 59
VJ . 4
JLU
| Многоканальное устройство для измерения динамических деформаций | 1982 |
|
SU1048303A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
