о
XI
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления магнитострикционным фиксатором | 1988 |
|
SU1557387A1 |
| Магнитострикционный шаговый двигатель | 1981 |
|
SU993791A1 |
| Адаптивное зеркало | 1987 |
|
SU1503544A1 |
| СПОСОБ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ЭЛЕМЕНТОМ ПОЗИЦИОНИРУЮЩЕГО МЕХАНИЗМА ДИСКРЕТНОГО ДЕЙСТВИЯ | 1991 |
|
RU2028716C1 |
| СПОСОБ ПОЗИЦИОННОГО УПРАВЛЕНИЯ СТРИКЦИОННЫМ МЕХАНИЗМОМ | 1989 |
|
RU2012031C1 |
| Способ многопараметрового электромагнитного контроля ферромагнитных изделий и устройство для его осуществления | 1985 |
|
SU1288579A1 |
| Способ анализа доменной структуры магнитных материалов | 1984 |
|
SU1176705A1 |
| Способ бесконтактного измерения перемещений | 1982 |
|
SU1129490A1 |
| Устройство для измерения магнитострикции образцов микронных толщин | 1983 |
|
SU1238011A1 |
| Безредукторный бесконтактный следящий электропривод | 1981 |
|
SU1001412A1 |
Магнитострикционный исполнительный механизм относится к области электротехники. Может быть использован в устройствах автоматики в качестве исполнительного механизма дискретного, в том числе шагового, перемещения. Целью изобретения является повышение эффективности позиционирования упругой нагрузки. Механизм содержит магнитострикционный элемент в виде трубки и намагничивающую систему. Последняя выполнена в виде секций. Секции магнитосвязаны с участками трубки и состоят из постоянного магнита с обмоткой. Секции размещены в шахматном порядке снаружи и внутри трубки и разделены диамагнитными прокладками. При запиты- рании обмотки секции происходит размагничивание соответствующего участка трубки. Величина заданного перемещения задается количеством запитываемых секций, отсчитываемых от нагрузки. Так как модуль упругости участков магнитострикци- онного элемента при переходе в размагниченное состояние уменьшается, происходит увеличение затухания переходного процесса при отработке шага позиционирования. Это позволяет отказаться от применения активных методов демпфирования корректирующими цепями, за счет чего повысить эффективность позиционирования. 3 ил. (Л
Изобретение относится к электротехнике и может быть использовано в устройствах автоматики в системах управления исполнительными механизмами дискретного, в том числе шагового, действия для прецизионных перемещений.
Целью изобретения является повышение эффективности позиционирования упругой нагрузки.
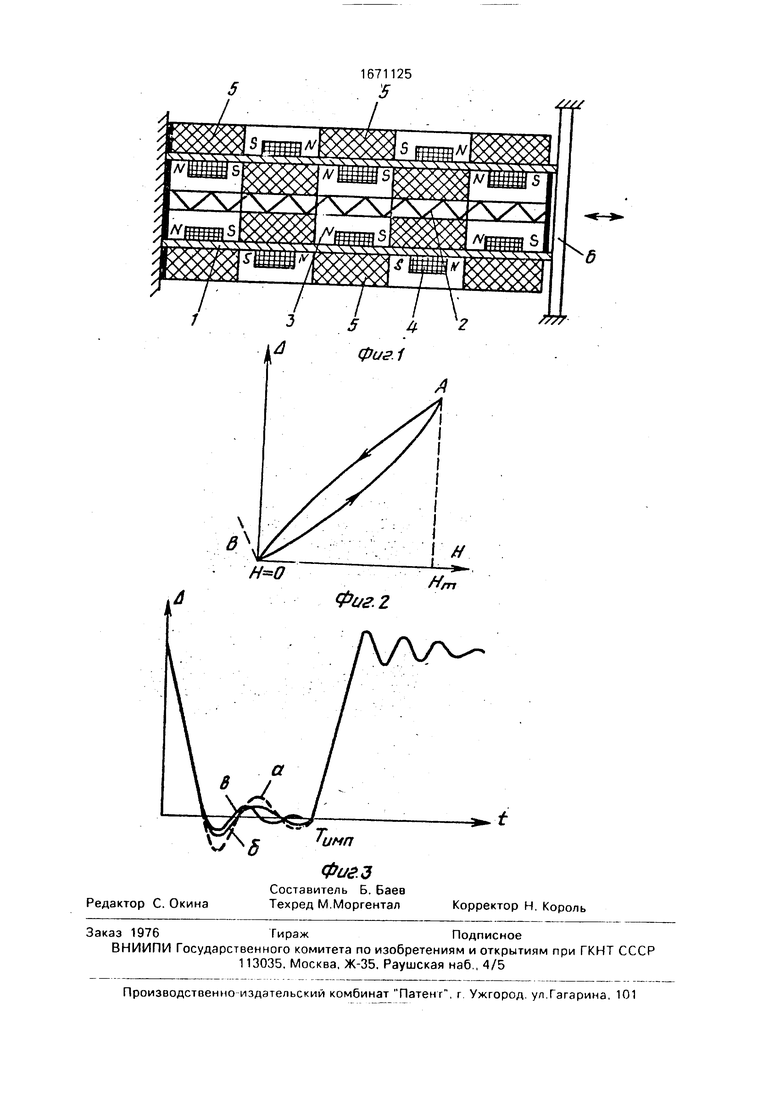
На фиг. 1 схематически изображен магнитострикционный исполнительный механизм; на фиг. 2 - рабочая, предельная и частная магнитомеханическая характеристика намагничивающего участка магниюстрикционного элемента. Д f(H); на фиг. 3 - временная зависимость перемещения участка магнитострикционного элемента Д-- f(t).
Yci роиство состоит из магнитострикционного элемента, выполненного в виде трубки 1. подпружиненной пружиной 2, внутренней и наружной намагничивающих систем, каждая из которых выполнена из последовательно чередующихся намагничивающих секций 3 с обмотками намагничивания 4 и диамагнит ных прокладок 5, имеющих равные продольные размеры, нагрузки 6 Намагничивающие секции выполнены в виде постоянных магнитов с обратным порядком чередования поN5СЛ
TIOLOB наружных и внутренних секции птнп СИТРЛГНО труики 1
Магнитострикционныи jnenenT может ()ыть ВЫПОЛНРН из материала SPV с гшпожи- тельним так и с офицателыым ко ффици
е НТОМ МЭГ НИТОСфИКЦИИ (гСЛИ ОН П11ПО; НРН
с положительной магниюприкииеи то он работает (осуществляется процесс позиционирования) на перемощение нагрузки 6 влево а если из материала с строительной магнигострикциеи то он работает HP пррр меидсние нагрузки 6 вправо |см фиг 1)
Для повышения линеиносш магнитоме- ханичрской эррктер1к,тики м л ншотрик- ционного ЗЛРМСНТЗ и независимости PC от изменений механических напряжении под влиянием схяыя или раия/ения нафутки
ИСПОЛЬЗУЮТ При ЭТОЙ Кумир
Ку к)/х У , где Ку Ргр упр., -с Ку кс Э |)фи
|,иенты упругости нлфуэки прухит и магии
тс стрп ционного NViua 1 С01 1 гчстпеннр
1 ГД 1 отшитое1 р.нционныи г почо
4ЧТРЛЬНОЙ магнитогтрищиеи в шхот. гп ючнии снимают максимальной сплои влияния упругой nnrpj3l/i а ма1ни острик цион ч й псг ент с отргц п пьчои шт п ИООДРОМ соггпчг м | чстчг.н v ,сй же силой
N стропе п о рт оогаст следующим ,i ior-i Точное пот. циоипроглние осуществпяюг поламей тока п лапотки HP агничивани 3 нзмагничирающих секцн 1 7 выбранных по vo -и leciBV нтпипчгс гла ог нагрузки
Пусть маг i итпстрт ni O iHi ш тлемент ньчюлнен из материал г иге л поп агчитосгриь циги d количество нгмагничи Hri ouuixсекции равно пяти Пр,1пгп нопртч и a rii и ч и са н и и nc px HifHiiu н мы
уЧРСГ 01 .ИсТ 11 r ;C1pl1l ЦО iC4C I (OliT
Hfi пгп i Liuri i niu no nanmiMt ,j hri
5мкм MI , и i i i , и i i -. i vi H,ipuaTi ч г- |i i ч i ц. i о i пго учЯ1 т к-1
пя neppveiiip п« ( и наг()у п шпример на гчм разме1гни1|ипстт чещр1 памж ничмичю и v ум тчзплпчип пиндим t oro олемечта (а. ппл ч онш / inrrv iiH i помощью о(эиотои чамлгничитчив пр.т этгп лбочие точки тх-дого нтм гнич ч ,r1
V4dCi I а МЗГНИТГГТСЦ1 Ц110ННОГ1) fieM НМКМ
) переме инются и пппп i с -п л -rr,i вегствующего наиряжрчногги мтпитнг)гп поля магнита Mm в гюло/(-0ни t-i CIXPIH CT пуюа;ее напрч еннг ти Н 0 Пои IMIT, ание пепеуол ого процес т /глти чтт сс на то же количество пропей ти что и v rv-Ht mminp мод/лч упр/г it TI. - irrii и
гТрИ 1.ИОННОГО 1 (li IT t,| n. , (i t IM
активного в пассивное(размагниченное)со- с тонкие (крипая а ( 3) а так как магни- гоотригцпонный 3( носит четный характрр то при переходе через точку В
возникает магиитострикционная сила, которая будет прогиноположиа динамической силе и будет дополнительно демпфировать переходный процесс (кривая б , фиг. 3). Кроме этого если характер нагрузки упру0 (ии го при отработке перемещения возникает упругая сила нагрузки, которая будет также противоположна динамической силе, а переходный процесс будет происходить с
5 большей частотой м и с еще
m
большим затуханием, так как при этом необходимо учитывать (вязкость) коэффициент затухания упругой нагрузки, выраженный через
ко «фЛицигчт демпфирования Kg Kg Кд нагр, дс К нагр коэффициент демпфирования наг (i рио 14 R фш 3)
Для -озрфпценич ц исходное положение снимают управляюи(ее воздействие с
1: выбранш ix по ко/шчзстну обмоток намагни- нив iioin1 11 секции п)и этом рабочая точка iiti iai ьичппаюшп/ уччстков магнитострик- цио titoro элемента перемещается в исходно1 поло сниеЛ
Таким , по сравнению с протоыпоп заяолчемыи механизм позволяет повысить точность позиционирования упругой нагрузки и уменьшить время ре улирования при пряном п обратном позиционировании
hiM применения активных методов демпфи- роплния юрректир/ющигш цепями что ведет повышению эффективности отрабатывае I1- ПРрСГ Ь(РН1 И
J
5
ф о р - у л ,5 и з о I р с т е н и я
Mai нитс т; псционнии исполнительный
г I-THIJM u)/n р кащип noi иигострикцион1ч-и )и d ьгде трубки и Нсэмагничиваю.-ю в1 г1олне г1ую з виде секций,
((ч и наг нпог рга дн, мйгнитосвяHiiHOi о с v гк п ом трубки и обмотки намаг| ип и и i it v ч i ю щ и и с я гем что, с
I ,i,i I not h I hP V i I ) ф-jk ПН1НОС1 И ПОЗИЦИОмишпнич /пругпп ,ni р/зт секции намаг- иичи По кчцеи HCTPMii азмещены в j iTiior- по кд| о м угри и гнаружи труб- и и ()тдрг -HI,- .1 пл нигными прокладками личсыше размеры которых равны , и синьм плчигртм прогивотежащих сек- пи. при льм г гныпоироводы секций вы- i-iiK1 i р .л/ч1 ЮСЮЯНН1К магнитов с
rlf) i)lHI riot п п-- юре. ПОЛЮСОВ
. +H, i ч i чип 1Л { tn аии
4&
| Магнитострикционное устройство линейных микроперемещений | 1984 |
|
SU1286030A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР № 1514197, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
