Изобретение относится к способам определения центра масс изделий, например лесоматериалов, для определения захвата их и может быть использовано при разгрузке автопоездов подъемно-транспортным оборудованием с грейфером или подобным челюстным захватом.
Цель изобретения - повышение точности при выполнении платформы из отдельных секций с опорами для объекта.
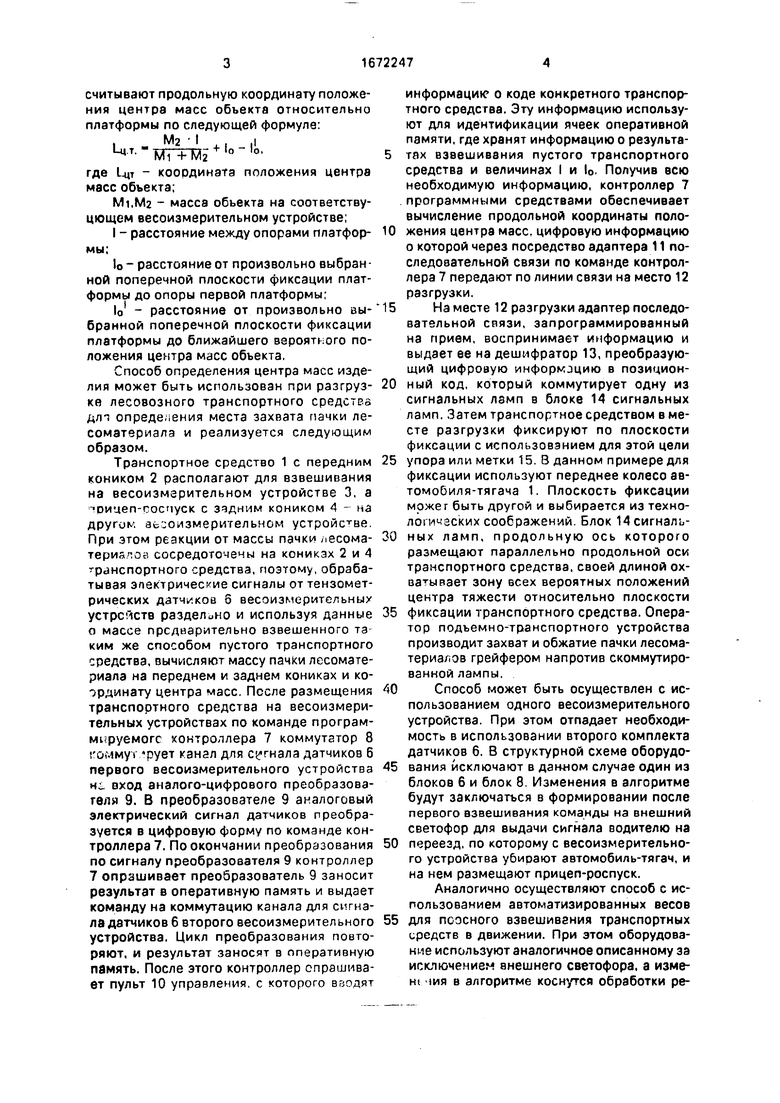
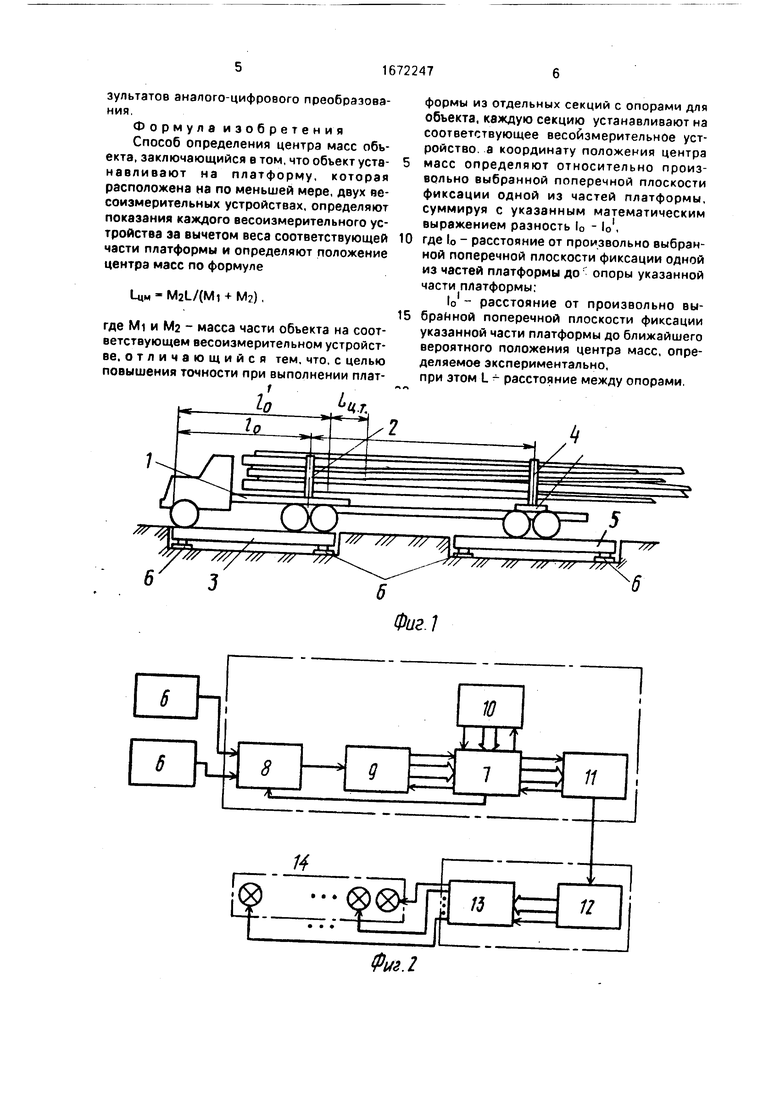
На фиг. 1 дана схема размещения транспортного средства на весоизмерительном устройстве; на фиг.2 - структурная схема оборудования для реализации способа; на фиг.З - схема расположения транспортного средства и оборудования в месте разгрузки.
Способ определения центра масс объекта заключается в следующем.
Объект располагают на опорах платформы, состоящей из двух частей. Взвешивают на весоизмерительных устройствах кажду часть платформы без объекта и данные о массе различных частей платформы записывают в память вычислительного оборудования. После установки на опоры платформы объекта вновь взвешивают каждую платформу на тех же весоизмерительных устройствах. По результатам двух взвешиваний рассчитывают массу объекта отдельно на каждой опоре как разницу результатов второго и первого взвешиваний. По полученным данным расо VI ю
N3 VJ
считывают продольную координату положения центра масс объекта относительно платформы по следующей формуле: М2 I
Цт.I- + 10 Ml +M2
где LHT - координата положения центра масс объекта;
Mi,M2 - масса объекта на соответству- цющем весоизмерительном устройстве;
I - расстояние между опорами платформы;
1о - расстояние от произвольно выбранной поперечной плоскости фиксации платформы до опоры первой платформы;
1о - расстояние от произвольно выбранной поперечной плоскости фиксации платформы до ближайшего вероятного положения центра масс объекта.
Способ определения центра масс изделия может быть использован при разгрузке лесовозного транспортного средстве длт опреде-.ения места захвата пачки лесоматериала и реализуется следующим образом.
Транспортное средство 1 с передним коником 2 располагают для взвешивания на весоизмерительном устройстве 3, а рицеп-госпуск с зчдним коником 4 - на другом весоизмерительном устройстве. При этом реакции от массы пачки лесоматериалов сосредоточены на кониках 2 и 4 транспортного средства, поэтому, обрабатывая электрические сигналы от тензомет- рических датчиков б весоизмерительных устройств разделимо и используя данные о массе предварительно взвешенного таким же способом пустого транспортного средства, вычисляют массу пачки лесоматериала на переднем и заднем кониках и координату центра масс. После размещения транспортного средства на весоизмерительных устройствах по команде программируемого контроллера 7 коммутатор 8 гоммуу рует канал для сигнала датчиков 6 первого весоизмерительного устройства н;. вход аналого-цифрового преобразователя 9. В преобразователе 9 аналоговый электрический сигнал датчиков преобразуется в цифровую форму по команде контроллера 7. По окончании преобразования по сигналу преобразователя 9 контроллер 7 опрашивает преобразователь 9 заносит результат в оперативную память и выдает команду на коммутацию канала для сигнала датчиков 6 второго весоизмерительного устройства. Цикл преобразования повторяют, и результат заносят в оперативную память. После этого контроллер опрашивает пульт 10 управления, с которого вводят
информацию о коде конкретного транспортного средства. Эту информацию используют для идентификации ячеек оперативной памяти, где хранят информацию о результа5 тах взвешивания пустого транспортного средства и величинах I и 0. Получив всю необходимую информацию, контроллер 7 программными средствами обеспечивает вычисление продольной координаты поло0 жения центра масс, цифровую информацию о которой через посредство адаптера 11 последовательной связи по команде контроллера 7 передают по линии связи на место 12 разгрузки.
5 На месте 12 разгрузки адаптер последовательной связи, запрограммированный на прием, воспринимает информацию и выдает ее на дешифратор 13, преобразующий цифровую информацию в позицион0 ный код, который коммутирует одну из сигнальных ламп в блоке 14 сигнальных ламп. Затем транспортное средством в месте разгрузки фиксируют по плоскости фиксации с использованием для этой цели
5 упора или метки 15. 8 данном примере для фиксации используют переднее колесо ав- томоЬиля-тягача 1. Плоскость фиксации мржег быть другой и выбирается из техно- логмчэских соображений. Блок 14сигналь0 ных ламп, продольную ось которого размещают параллельно продольной оси транспортного средства, своей длиной ох- ватывает зону всех вероятных положений центра тяжести относительно плоскости
5 фиксации транспортного средства. Оператор подъемно-транспортного устройства производит захват и обжатие пачки лесоматериалов грейфером напротив скоммутиро- ванной лампы.
0 Способ может быть осуществлен с использованием одного весоизмерительного устройства. При этом отпадает необходимость в использовании второго комплекта датчиков 6. В структурной схеме оборудо5 вания исключают в данном случае один из блоков 6 и блок 8. Изменения в алгоритме будут заключаться в формировании после первого взвешивания команды на внешний светофор для выдачи сигнала водителю на
0 переезд, по которому с весоизмерительного устройства убиоают автомобиль-тягач, и на нем размещают прицеп-роспуск.
Аналогично осуществляют способ с использованием автоматизированных весов
5 для поэсного взвешивания транспортных средств в движении. При этом оборудование используют аналогичное описанному за исключением внешнего светофора, а изме- H( чия в алгоритме коснутся обработки результатов аналого-цифрового преобразования.
Формула изобретения Способ определения центра масс объекта, заключающийся в том, что объект уста- навливают на платформу, которая расположена на по меньшей мере, двух весоизмерительных устройствах, определяют показания каждого весоизмерительного устройства за вычетом веса соответствующей части платформы и определяют положение центра масс по формуле
Цм - M2L/(Mi + М2),
где Mi и М2 - масса части объекта на соответствующем весоизмерительном устройстве, отличающийся тем, что, с целью повышения точности при выполнении плат1
формы из отдельных секций с опорами для объекта, каждую секцию устанавливают на соответствующее весоизмерительное устройство, а координату положения центра
масс определяют относительно произвольно выбранной поперечной плоскости фиксации одной из частей платформы, суммируя с указанным математическим выражением разность 10 -
где о - расстояние от произвольно выбранной поперечной плоскости фиксации одной из частей платформы до опоры указанной части платформы:
lo1 - расстояние от произвольно выбрайной поперечной плоскости фиксации указанной части платформы до ближайшего вероятного положения центра масс, определяемое экспериментально, при этом L - расстояние между опорами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Форвардер | 2021 |
|
RU2761556C1 |
| МОБИЛЬНОЕ УСТРОЙСТВО ДЛЯ СОРТИРОВКИ КРУГЛЫХ ЛЕСОМАТЕРИАЛОВ И ПОШТУЧНОЙ РАЗБОРКИ ИХ ПАЧЕК | 1990 |
|
RU2029639C1 |
| СПОСОБ И УСТРОЙСТВО В СИСТЕМЕ ВЗВЕШИВАНИЯ, СООТВЕТСТВУЮЩИЙ ПРОДУКТ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ И МАШИНА ДЛЯ ПОГРУЗКИ-РАЗГРУЗКИ МАТЕРИАЛОВ | 2014 |
|
RU2657024C2 |
| ГРУЗОВАЯ ПЛАТФОРМА ЛЕСОЗАГОТОВИТЕЛЬНОЙ МАШИНЫ | 2022 |
|
RU2785022C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ РАЗГРУЗКОЙ ЛЕСОТЕХНИЧЕСКОЙ МАШИНЫ | 2019 |
|
RU2814827C2 |
| СПОСОБ МОНИТОРИНГА ПЕРЕМЕЩЕНИЯ И АВТОМАТИЧЕСКОГО КОНТРОЛЯ ЛЕГАЛЬНОСТИ ЗАГОТОВКИ КРУГЛЫХ ЛЕСОМАТЕРИАЛОВ В ЦЕПИ ПОСТАВОК | 2015 |
|
RU2589325C1 |
| Грейфер | 1986 |
|
SU1390170A1 |
| СПОСОБ КОМПОНОВКИ ЦИЛИНДРИЧЕСКИХ ЛЕСОМАТЕРИАЛОВ НА ЖЕЛЕЗНОДОРОЖНЫХ ПЛАТФОРМАХ | 2021 |
|
RU2768993C1 |
| Грейфер с дистанционным управлением | 1988 |
|
SU1553510A1 |
| ПОГРУЗОЧНО-ТРАНСПОРТНОЕ СРЕДСТВО | 1993 |
|
RU2061602C1 |
Изобретение относится к способам определения центра масс изделий, например лесоматериалов, для определения места захвата их и может быть использовано при разгрузке автопоездов подъемно-транспортным оборудованием с грейфером или подобным челюстным захватом. Способ определения центра масс объекта заключается в том, что объект устанавливают по меньшей мере две опоры, каждая из которых закреплена на платформе, установленной на соответствующем весоизмерительном устройстве и определяют массу объекта на каждом весоизмерительном устройстве за вычетом массы соответствующей платформы и по математической формуле определяют положение центра масс объекта относительно платформы. Способ может быть применен при определении положения центра масс пачки лесоматериала, находящегося на кониках транспортного средства и прицепа, для захвата грейфером. Причем массу лесоматериала на соответствующем весоизмерительном устройстве определяют при взвешивании пустого и загруженного транспортного средства. 3 ил.
«J
Фиг.1
Фиг.2
Фю.З
| Установка для определения центра тяжести вагонов и других повозок | 1939 |
|
SU59588A1 |
