Изобретение относится к технике измерения скорости текучих сред и может быть использовано для измерения параметров вертикального распределения горизонтальной скорости течения в океане.
Цель изобретения - повышение достоверности определения вертикального распределения скорости морского течения.
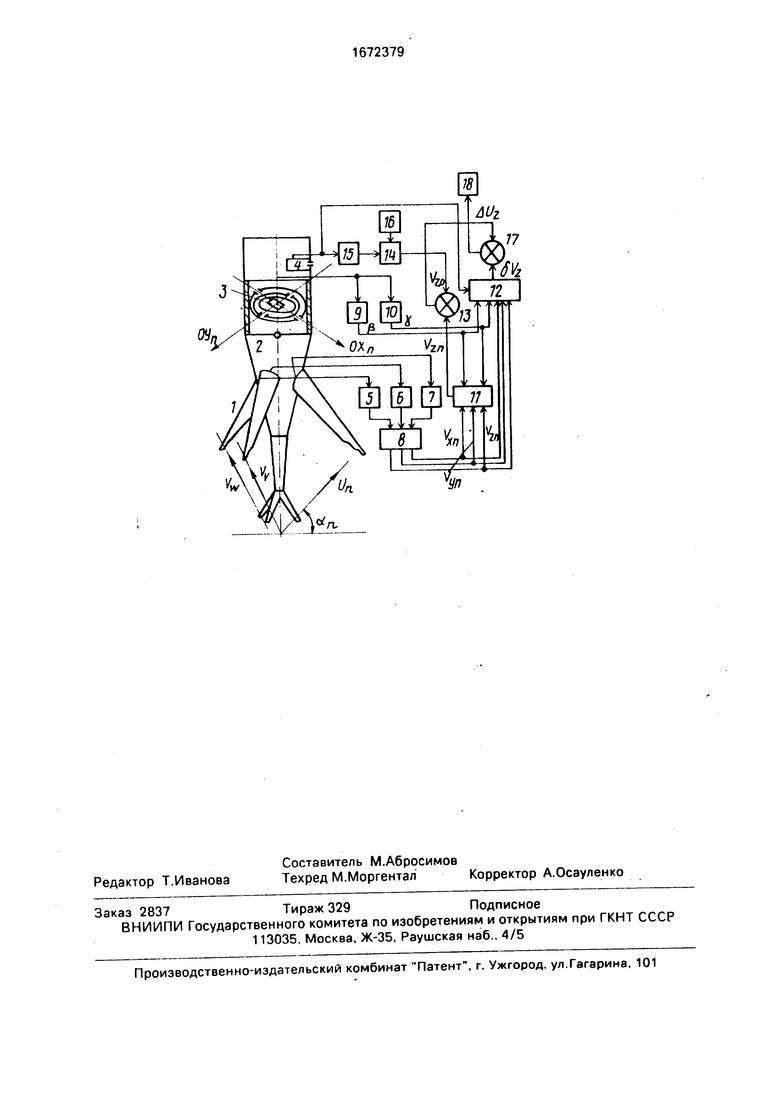
На чертеже изображен вариант выполнения зонда скорости течения.
Измерительный зонд содержит трех- компонентный датчик 1 скорости течения, в осях которого производятся измерения составляющих Vn, Vv, Vw, установленный на корпусе 2 зонда, в котором имеется помещенный в соленоид индукционный (ферро- зондовый) измеритель 3 углов отклонения корпуса 2, связанный с маятником. Го- ризонтирование плоскости индукционного измерителя 3 выполняется при помощи карданного подвеса, одна из осей которого (ОХ) находится в вертикальной плоскости, совпадающей с плоскостью оси акустического измерителя. В корпусе 2 зонда находится также измеритель 4 гидростатического давления. Выходы датчика 1 скорости течения через измерительные преобразователи 5-7 подключены к первому вычислителю 8 составляющих скорости течения по продольной оси корпуса 2 зонда OZn и поперечным
О
XJ го со
XI
ю
осям ОХп и OYn. Выходы индукционного измерителя 3 через измерительные преобразователи 9 и 10 углов крена /3 и дифферента у соответственно совместно с выходами вычислителя 8 подключены к входам второго вычислителя 11 скорости зондирования и третьего вычислителя 12 допустимых отклонений между скоростью зондирования и приращений глубины за фиксированные интервалы времени. Выход вычислителя 11 подключен к первому входу элемента 13 сравнения. К второму входу элемента 13 сравнения подключен выход четвертого вычислителя 14 параметров регрессии, к входам которого подключены измерительный преобразователь 15 глубины и задатчик 16 числа циклов измерения. Выход элемента 13 сравнения соединен с первым входом элемента 17 сравнения, к второму входу которого подключен выход вычислителя 12 допустимых отклонений, а выход элемента 17 сравнения соединен с входом индикатора 18.
Зонд скорости течения работает следующим образом.
В процессе погружения зонда производится измерение трех составляющих скорости потока в осях датчика скорости. Сигналы акустических датчиков в измерительных преобразователях 5-7 преобразуются в величины составляющих скорости потока в осях датчика, равные Vn, Vv. Vw. В вычислителе 8 производится их пересчет в составляющие вектора скорости.
Используются следующие соотношения:
Vxn
JL (2Vu - Vv - VW) :
Ч a2 (Vv - VW)(1)
О
(Vu 4- Vv + Vw) ,
За
где а tg On - тангенс угла наклона измерительных осей к плоскости горизонта.
В вычислителе 11 определяется вертикальная скорость погружения зонда Vz, равная следующей величине:
Vz -VxnSiny + Vynsin/3cosy + + Vzncos/fcosy,(2)
где у - угол дифферента - угол между нормальной осью ОХп и горизонтальной плоскостью; ( у 0, когда ось ОХп находится выше плоскости горизонта);
Р - угол крена - угол разворота зонда относительно оси OX;/J 0, когда ось OZn совмещается со своей проекцией на плоскость ZOXn поворотом вокруг оси ОХП против
часовой стрелки, если смотреть в направлении этой оси.
Для уменьшения влияния качки судна на результаты измерений величина Vz ос- редняется за время, равное 5-10 периодам качки судна, т.е. за 35-50 с. На выходе вычислителя 11 формируется величина Vzn, равная
Ю , 1 v ч/ ,J1Vzl
(3)
0
5
0
5
0
где п - число циклов измерения, равное интервалу времени 35-40 с.
Среднее значение скорости погружения зонда Vzn сравнивается с величиной, вычисленной по приращению глубины погружения зонда на основе показаний измерителя 4 гидростатического давления, которые пересчитываются в глубину по соотношению:
hi (99,404 + 4,983.10 /Л - 2.06-10 4 tyd2+ + 1,493-1061у 13Р)-2,204-10 2Р2, (4) где р - широта места;
Р - величина гидростатического давления,
Показания глубины hi используются в вычислителе 14 параметров регрессии для нахождения средней скорости опускания зонда Vzp, с которой сравнивается величина Vzn. Вычислитель 14 параметров регрессии использован для эффективного отфильтро- вывания составляющих сигнала, связанных с качкой судна. Используются следующие соотношения для определения величины VZP:
пи
Z.ib;-JliHn( „
Vi -I
iТ I Г1 - / . Ш I 1 | ( -s-
Ul l
(5)
Интервал осреднения п ДТ Т при вычислениях величин и Vzn принимается одинаковым.
Разность AVZ величин Vzn и Vzp с выхода элемента 13 сравнения поступает на вход элемента 17 сравнения, где она сравнивается с допустимым расхождением б Vz вели- чин Vzn и Vzp, которое обусловлено погрешностями измерений, Величина 6 Vz определяется в вычислителе 12 следующим образом. Величины Vzn и Vzp определяются с некоторыми погрешностями, дисперсии
которых стп
И0
Допустимое расхождение определяется по формуле:
5Vz 2 бГТоГ .
(6)
Дисперсия On вычисляется путем дифференцирования соотношений (1) и 92) по величинам Vn, Vv, Vw, ft и у .
При обозначении величинами о$ и
о соответственно дисперсии измерения скорости и угловых величин:
ffnZ-6 fV4ncos r-VrSfn Sin .Vtn in/ eesip) (Vyn cos/1 COS.P V/r, sin/5 «S/)2J -J2- б,г(51 n j
..(sinr.tnj/Jwr.caAp:
.(nr coSj3S -Ј l)jf7)
(8)
790
Дисперсия ар определяется виалогич- u ным образом, Ее величина равна:
Mnal
f.-IVn4l)
В840 +49еЗ 10 У -206 10-41 I 4 Ш Т5
где Стд - дисперсия погрешности измерителя 4 давления.
В элементе 17 сравнения, на входы которого подаются величины Д Vz и a Vz, вырабатываются сигналы исправности-неисправности указанных измерительных каналов по следующему правилу:
при lAVzl oVz комплекс исправлен;
при lAVzlx5Vz комплекс неисправен.
Указанный сигнал исправности-неисправности с выхода элемента 17 сравнения подается на вход индикатора 18, где произво- дится отображение результатов непрерывного взаимного контроля метрологических характеристик измерительных каналов скорости течения, гидростатического давления и угловых величин. В случае, если под дей- ствием дестабилизирующих факторов погреш
10
15
90
u
25
30
35
40 45 ность одного из указанных измерительных каналов превысит допустимую величину, возникает рассогласование сигналов Vzn и VZP, произойдет увеличение величины AV/ на выходе элемента 17 сравнения, и на выходе этого элемента будет сформирован сигнал неисправности, который и отобразится на индикаторе 18,
Применение зонда позволяет оперативно в режиме автоматического контроля осу ществлять проверку измерительных каналов и обеспечивать необходимую достоверность результатов в течение длительного, межповерочного интервала. Формула изобретения Измерительный зонд скорости течения, содержащий измеритель скорости течения, измеритель углов отклонения корпуса зонда от вертикали, измеритель гидростатического давления, индикатор, отличающий- с я тем, что, с целью повышения достоверности определения вертикального распределения скорости течения в условиях воздействия дестабилизирующих факторов, в него дополнительно введены первый вычислитель, к входам которого подключены выходы измерителя скорости течения, второй и третий вычислители, входы которых соединены с выходами первого вычислителя и выходами измерителя углов отклонения корпуса зонда, четвертый вычислитель, первый вход которого соединен с выходом измерителя гидростатического давления, задатчик числа циклов, подключенный к второму входу четвертого вычислителя, первый элемент сравнения, первый вход которого соединен с выходом второго вычислителя, а второй вход соединен с выходом четвертого вычислителя, второй элемент сравнения, первый вход которого соединен с выходом третьего вычислителя, а второй вход - с выходом первого элемента сравнения, а выход второго элемента сравнения подключен к входу индикатора, при этом отдельный вход третьего вычислителя соединен с выходом измерителя гидростатического давления.

| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ СКОРОСТИ ТЕЧЕНИЯ | 1991 |
|
RU2050547C1 |
| Способ измерения фазового распределения поля антенны | 1988 |
|
SU1552133A1 |
| Устройство для измерения скорости течения | 1982 |
|
SU1136081A1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДЛЯ СУДОВ ЛЕДОВОГО ПЛАВАНИЯ | 2011 |
|
RU2487365C1 |
| Зондирующий комплекс профиля скоростей течения | 1982 |
|
SU1070484A1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| Способ начальной выставки в азимуте самоориентирующегося указателя курса с каналами горизонтальной коррекции с невертикальной осью наружной рамки | 1990 |
|
SU1815596A1 |
| Зондирующий комплекс профиля скоростей течения | 1979 |
|
SU792144A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОБЪЕМНОГО РАСХОДА ЖИДКОСТИ В БЕЗНАПОРНОМ КАНАЛЕ | 1998 |
|
RU2139503C1 |
| Устройство для измерения и регистрации скорости и направления течений | 1983 |
|
SU1164605A1 |
Изобретение относится к технике измерения скорости текучих сред и может быть использовано для измерения параметров вертикального распределения горизонтальной скорости течения в океане. Цель изобретения - повышение достоверности определения вертикального распределения скорости течения в условиях воздействия дестабилизирующих факторов. Зонд содержит измерители 1, 3 и 4 соответственно скорости течения, углов отклонения корпуса зонда и гидростатического давления, выходы которых через соответствующие измерительные преобразователи подключены к входам вычислителей 11, 12 и 14, соединенных с элементами 13 и 17 сравнения. При зондировании происходит автоматическое сравнение фактических значений измеряемых величин с заданным уровнем. Если погрешность одного из измерительных каналов превысит допустимую величину, на выходе элемента 17 сравнения появляется сигнал неисправности, который отображается индикатором 18. 1 ил.
| Тарасюк Ю.Ф | |||
| и Серавин Г.Н | |||
| Гидроакустическая телеметрия | |||
| Л.: Судостроение, 1973 | |||
| Зондирующий комплекс профиля скоростей течения | 1979 |
|
SU792144A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
