Изобретение относится к технике измерения скорости текучих сред и может быть использовано для измерения характеристик вертикального распределения и временной изменчивости скорости течения водной среды в океанах, морях, реках и озерах.
Известны измерители скорости течения, содержащие двухкомпонентные акустические или электромагнитные датчики скорости, а также компасы, при помощи которых определяется направление вектора скорости в земной (географической) системе координат [1] Основной недостаток таких измерителей состоит в том, что при отклонениях пpодольной оси измерителя от вертикали на условно горизонтальные измерительные оси проектируется некоторая часть вектора скорости вертикальных движений прибора и при этом происходит суммирование этой составляющей с полезным сигналом от измеряемой горизонтальной скорости течения.
Известен также измерительный зонд скорости течений [2] В этом устройстве имеются три компонентных акустических измерителя скорости течения, измерительные оси которых находятся в трех вертикальных плоскостях, углы между которыми составляют 120о. Наклон измерительных осей к горизонтальной плоскости составляет 35,264о, а взаимные углы между осями равны 90о. В конструктивном отношении акустический измеритель скорости течения представляет собой центральную конусную стойку, в которой крепятся три пары наклонных стоек меньшего размера, на концах которых устанавливают пьезоакустические преобразователи, плоскости которых взаимно параллельны. В состав устройства входят также измерители углов курса крена и дифферента корпуса зонда.
Недостаток указанного устройства состоит том, что диаграмма направленности указанного измерителя скорости течения является относительно узкой. Это ограничивает применение указанного устройства исключительно для зондирующих приборов, где предполагается наличие значительной скорости обтекания по продольной оси корпуса.
Наиболее близким по технической сущности к предлагаемому является прибор для измерения течений [3] содержащий корпус, в котором в кардановом подвесе установлен феррозондовый измеритель углов курса, крена и дифферента, а также четырехкомпонентный измеритель скорости течения, содержащий гидроакустические преобразователи, каждый из которых содержит плоские пьезоэлементы, подключенные через коммутатор к акустическому измерительному преобразователю, выход которого совместно с выходами феррозондового измерителя угловых величин подключен к вычислителю. Акустический измеритель скорости выполнен в виде центральной стойки, установленной на торце цилиндрического корпуса прибора и ориентированной по его продольной оси. На этой стойке установлены 8 наклонных стоек, четыре из них равной длины L у основания корпуса, а четыре равной длины l(l < L) на другом конце центральной стойки. На концах всех наклонных стоек зафиксированы пьезоакустические преобразователи таким образом, что их плоскости взаимно параллельны, а трассы распространения акустических сигналов (измерительные оси) расположены в двух взаимно перпендикулярных плоскостях. В этих же плоскостях находятся параллельная и поперечная оси корпуса прибора. Измерительные оси акустического датчика наклонены к горизонтальной плоскости под некоторым углом.
Недостатком известного устройства является низкая достоверность измерений, обусловленная следующим.
Погрешности, обусловленные возмущениями естественного течения вследствие того, что конструктивные элементы акустического датчика выполнены в виде восьми наклонных и одной (центральной) нормальной к потоку стоек, установленных в рабочем объеме.
Вторым недостатком является низкая точность из-за того, что проекции измерительных осей на горизонтальные плоскости совпадают.
Третий недостаток обусловлен тем, что конструкция измерителя скорости течения относительно сложна и нетехнологична, так как каждый приемопередающий акустический преобразователь установлен на отдельной стойке.
Целью изобретения является повышение точности измерений при упрощении конструкции измерителя.
Цель достигается тем, что в измерителе скорости течения, содержащем корпус, в котором в кардановом подвесе установлен феррозондовый измеритель угловых величин курса, крена и дифферента и гидроакустические преобразователи, установленные на наклонных стойках, каждый из которых содержит плоские пьезоэлементы, подключенные через коммутатор к акустическому измерительному преобразователю, выход которого совместно с выходами феррозондового измерителя угловых величин подключен к вычислителю, измеритель выполнен в виде четырех наклонных стоек, на концах которых установлены четыре гидроакустических преобразователя, первый и второй преобразователи установлены на оси, параллельной оси внешнего кольца карданового подвеса феppозондового преобразователя угловых величин, ось внутреннего кольца которого параллельна оси, на которой установлены третий и четвертый гидроакустические преобразователи, каждый из гидроакустических преобразователей выполнен в виде двух плоских пьезоэлементов, плоскости которых установлены под углом 120о.
Повышение точности данных измерений достигается вследствие того, что трассы гидроакустических сигналов между взаимно параллельными плоскостями пьезоэлементов измерительные оси в измерителе скорости течения образуют замкнутый пространственный четырехугольник, вершины которого совпадают с четырьмя гидроакустическими преобразователями, находящимися на различных расстояниях по продольной оси корпуса измерителя. Любое пространственное положение измеряемого вектора скорости течения относительно измерительных осей исключает неоднозначное выделение составляющих этого вектора в земной системе координат, так как гидроакустические преобразователи установлены на взаимно перпендикулярных осях и параллельны осям внешнего и внутреннего колец карданового подвеса феррозондового измерителя угловых величин курса, крена и дифферента корпуса измерителя.
За счет того, что измерительные оси располагаются по периметру рабочего объема измерителя, в его центральной части отсутствуют конструктивные элементы в виде различных стоек, как это имеет место в прототипе. Освобождение внутреннего объема измерителя от конструктивных элементов и значительное уменьшение числа стоек уменьшают уровень возмущений естественного течения, что повышает точность данных измерений.
Второй фактор, повышающий точность данных измерений, обусловлен тем, что гидроакустические преобразователи установлены на наклонных по отношению к потоку стойках, гидродинамическое сопротивление которых меньше, чем аналогичная величина у стоек, расположенных по отношению к потоку нормально, как это имеет место в прототипе (положение центральной стойки).
Упрощение конструкции измерителя достигается за счет того, что при равенстве всех углов между измерительными осями пространственного четырехугольника в 60о может быть обеспечена идентичность всех четырех гидроакустических преобразователей, в которых плоскости пьезоэлементов установлены под углом 120о.
Использование четырех наклонных стоек, на которых установлены гидроакустические преобразователи вместо девяти в прототипе, также упрощает конструкцию измерителя скорости течения.
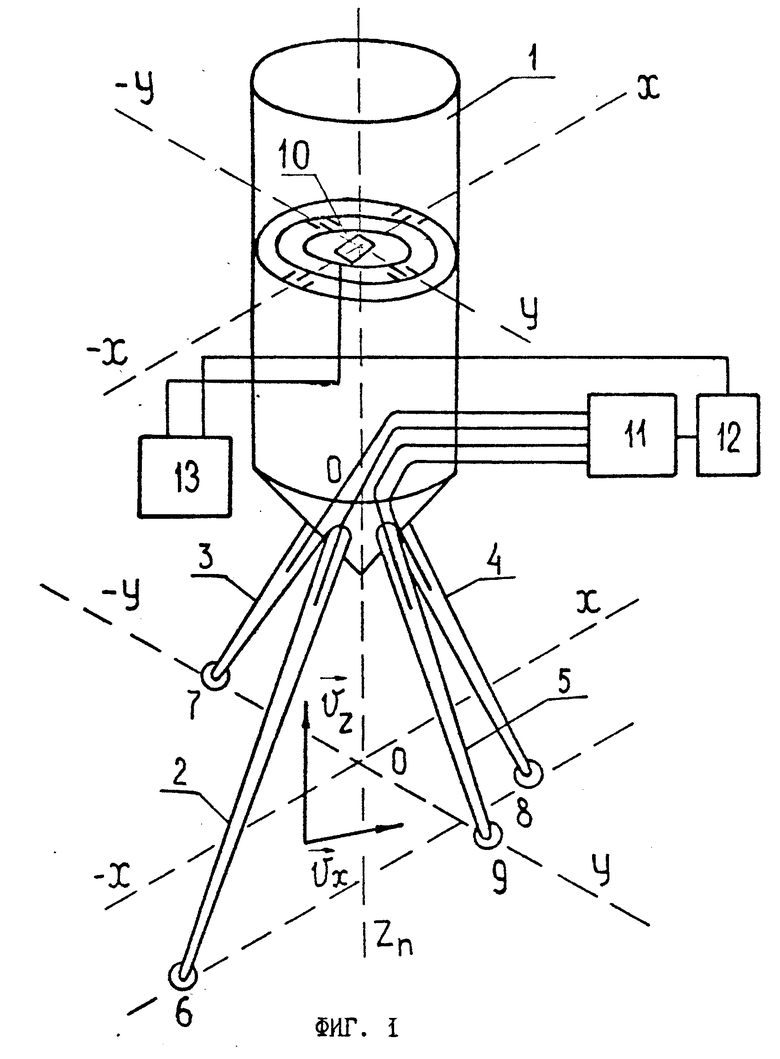
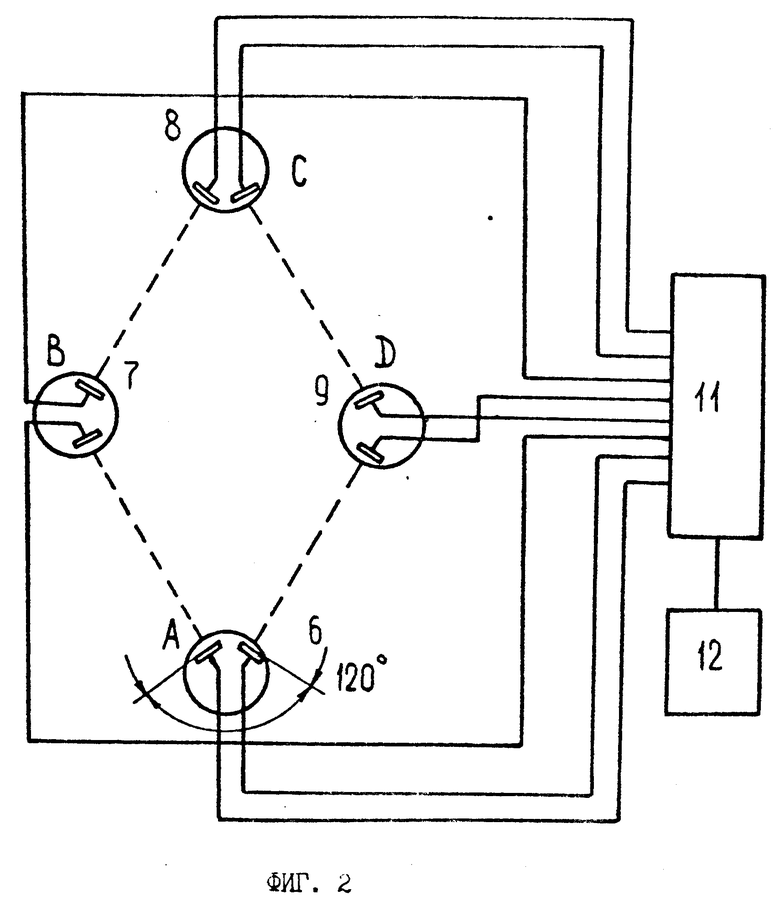
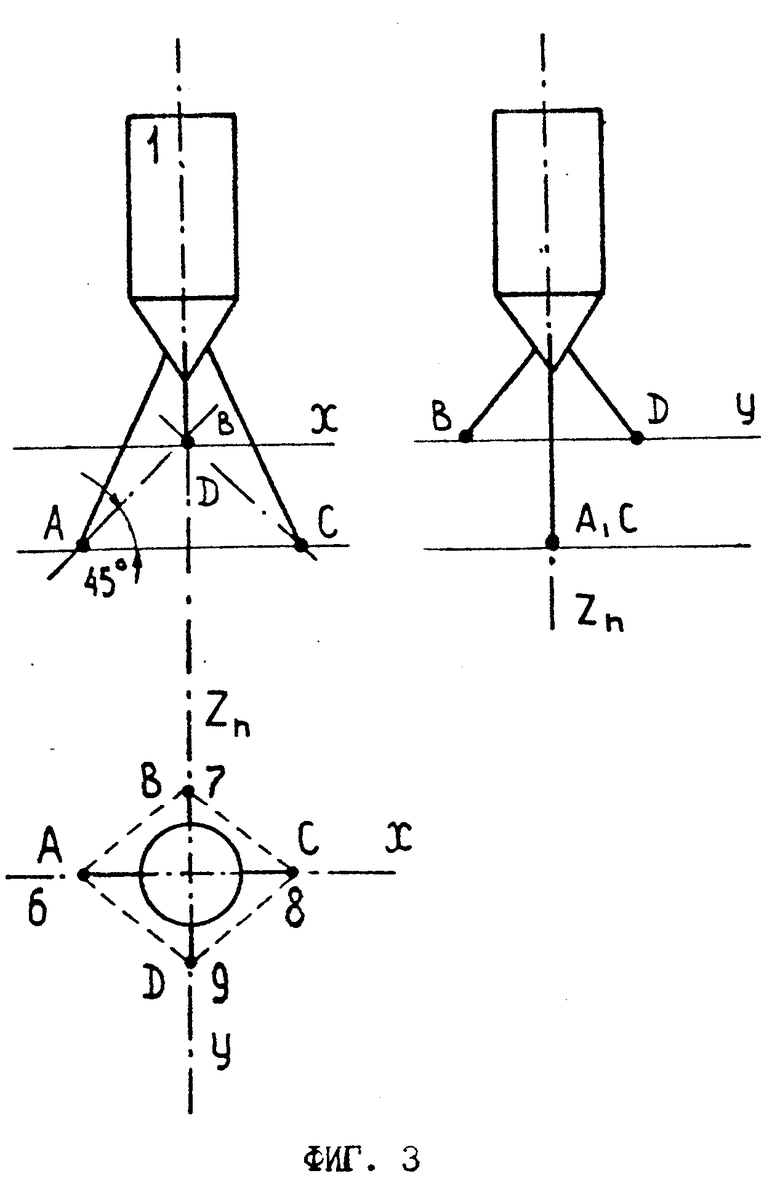
На фиг.1 показан измеритель скорости течения; на фиг.2 устройство гидроакустических преобразователей в составе измерителя скорости течения; на фиг. 3 конструкция измерителя скорости течения в трех проекциях.
Измеритель скорости течения содержит корпус 1, в торцовой части которого на четырех наклонных стойках 2 5 установлены гидроакустические преобразователи 6 9. В корпусе 1 измерителя в кардановом подвесе установлен феррозондовый измеритель 10 углов курса, крена и дифферента, причем ось внешнего кольца карданового подвеса параллельна нормальной оси корпуса зонда ОХ, а ось внутреннего кольца карданового подвеса параллельна поперечной оси корпуса измерителя ОY (фиг.1). Горизонтирование феррозондового измерителя 10 в кардановом подвесе осуществляется при помощи маятника (на чертеже не показано).
Гидроакустические преобразователи 6-9 содержат по два плоских пьезоэлемента, которые конструктивно объединены и установлены так, что плоскости их размещены под углом 120о (фиг.2). Пьезоэлементы, плоскости которых взаимно параллельны, попарно подключены через коммутатор 11 к измерительному преобразователю 12, выход которого совместно с выходом феррозондового измерителя 10 углов подключен к вычислителю 13.
Гидроакустические преобразователи 6 и 8 установлены на оси, параллельной нормальной оси ОХ корпуса измерителя 1, а гидроакустические преобразователи 7 и 9 установлены на оси, параллельной поперечной оси ОY. Расстояние между осями установки гидроакустических преобразователей 6, 8 и 7, 9 по продольной оси корпуса измерителя OZn подбирается таким образом, чтобы плоскости пьезоэлементов гидроакустического преобразователя 6 были параллельны плоскостям первых пьезоэлементов гидроакустических преобразователей 7 и 9, а плоскости вторых пьезоэлементов этих гидроакустических преобразователей параллельны пьезоэлементам гидроакустического преобразователя 8 (фиг.3). Минимальная длина стоек 2 5 выбирается из конструктивных соображений с учетом исключения влияния корпуса прибора на возмущение скорости течения в рабочем объеме датчика, обычно это 3-5 D (диаметров) корпуса прибора.
Гидроакустические пьезопреобразователи выполнены из двух плоских пьезоэлементов на основе керамических пластин. Коммутатор 7 представляет собой набор электронных ключей, управляемых цифровым распределителем.
Акустический измерительный преобразователь 12 содержит схемы встречного излучения и приема акустических импульсов и определения временных интервалов, пропорциональных разности прохождения этих импульсов во встречных направлениях.
Феррозондовый измеритель 6 угловых величин выполнен на основе индукционного компаса. В основе работы измерителя лежит измерение фазы между опорным и наведенным сигналами в рамке из пермаллоя, где под влиянием магнитного поля Земли происходит модуляция фазы. В качестве вычислителя 9 может быть использован стандартный микропроцессор или однокристальная ЭВМ.
Работа измерителя скорости течения осуществляется следующим образом.
При установке измерителя на фиксированной глубине или при его погружении со скоростью VZ производятся измерения составляющих вектора скорости течения вдоль осей АВ, BC, CD и DA (фиг.2) путем излучения и приема гидроакустических сигналов между пьезоэлементами, плоскости которых взаимно параллельны, и последующего преобразования сигналов в измерительном преобразователе 12. Одновременно производится измерение углов курса α крена βи дифферента γ при помощи феррозондового преобразователя 10. Угол курса α равен углу между горизонтальной проекцией нормальной оси ОХ (AB) и плоскостью меридиана, угол дифферента γ равен углу между нормальной осью ОХ и горизонтальной плоскостью и угол крена β равен углу разворота приборной (связанной с корпусом) системы отсчета относительно поперечной оси ОY.
При отклонениях продольной оси измерителя OZ от вертикали, которые возникают в свободно падающих приборах вследствие их прецессии при погружении, а также под действием вертикального сдвига скорости на длине корпуса, а в приборах, установленных на фиксированных глубинах или опускаемых на грузонесущем кабеле вследствие пульсаций натяжения под действием качки обеспечивающего судна и вследствие неравномерности гидродинамических сил обтекания корпуса, проекция вектора скорости вертикального движения VZ на нормальную и поперечную оси ОХ и ОY отличается от нуля. Это приводит к появлению составляющих сигналов измерительного преобразователя 12, пропорциональных скорости VZ и искажающих результаты измерений вектора скорости естественного течения  лежащего в горизонтальной плоскости.
лежащего в горизонтальной плоскости.
Пространственная ориентация измерительных осей АВ, BC, CD и DA акустического датчика определяется при помощи феррозондового измерителя 10 угловых координат, сигналы которого совместно с сигналами акустического измерительного преобразователя 12 подключены к вычислителю 13. Их совместная обработка позволяет исключить погрешности, обусловленные отклонением продольной оси измерителя от вертикали при наличии вертикальной составляющей скорости  обтекания компонентного измерителя.
обтекания компонентного измерителя.
Взаимодействие измеряемых составляющих скорости течения вдоль измерительных осей замкнутого пространственного четырехугольника и углов курса, крена и дифферента корпуса прибора однозначно определяют составляющие вектора скорости течения в земной системе координат независимо от пространственной ориентации осей корпуса измерителя.
Отсутствие параллельных измерительных осей в четырехкомпонентном измерителе скорости течения обеспечивает уменьшение инструментальной погрешности измерения за счет избыточности информации о трех составляющих вектора скорости течения в приборной системе координат.
В предложенном устройстве измерительные оси расположены на периферии рабочего объема измерителя скорости течения, что позволяет значительно уменьшить число стоек и освободить от них рабочий объем измерителя. Это ведет к уменьшению возмущений естественного течения конструктивными элементами измерителя и тем самым к повышению точности данных измерений.
Сокращение числа стоек и унификация гидроакустических преобразователей упрощают конструкцию предлагаемого устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметров ориентации троса геофизического прибора | 1985 |
|
SU1435940A1 |
| Акустический датчик скорости течения | 1990 |
|
SU1800368A1 |
| Измерительный зонд скорости течения | 1988 |
|
SU1672379A1 |
| Измеритель флуктуаций скорости течения | 1984 |
|
SU1216734A1 |
| Способ определения вертикальной структуры поля течения на ходу судна | 1985 |
|
SU1465771A1 |
| Зондирующий комплекс профиля скоростей течения | 1979 |
|
SU792144A1 |
| Чувствительный элемент электронного компаса | 1982 |
|
SU1030652A1 |
| Устройство для измерения интегральной скорости течения | 1980 |
|
SU1084683A1 |
| Устройство для измерения скорости течения | 1982 |
|
SU1136081A1 |
| Устройство для измерения скорости звука в жидкостях и газах | 1987 |
|
SU1538057A1 |
Использование: для измерения характеристик вертикального распределения и временной изменчивости скорости течения водной среды в океанах, морях, реках и озерах. Сущность изобретения: измеритель выполнен в виде четырех наклонных стоек, на концах которых установлены четыре гидроакустических преобразователя, причем одни преобразователи установлены параллельно оси внешнего кольца карданного подвеса феррозондового преобразователя, а другие преобразователи параллельно оси его внутреннего кольца. Каждый гидроакустический преобразователь выполнен в виде двух пьезоэлементов, плоскости которых установлены под углом 120°. За счет того, что измерительные оси располагаются по периметру рабочего объема измерителя, в его центральной части отсутствуют конструктивные элементы в виде различных стоек. Освобождение внутреннего объема измерителя от конструктивных элементов и значительное уменьшение числа стоек уменьшают уровень возмущений естественного течения, что повышает достоверность данных измерений. Гидроакустические преобразователи установлены на наклонных по отношению к потоку стойках, гидродинамическое сопротивление которых меньше, чем аналогичная величина у стоек, расположенных по отношению к потоку нормально. Упрощение конструкций измерителя достигается за счет того, что при равенстве всех углов между измерительными осями пространственного четырехугольника в 60° может быть обеспечена идентичность всех четырех гидроакустических преобразователей, в которых плоскости пьезоэлементов установлены под углом 120°. Использование четырех наклонных стоек, на которых установлены гидроакустические преобразователи, также упрощает конструкцию измерителя скорости течения. 3 ил.
ИЗМЕРИТЕЛЬ СКОРОСТИ ТЕЧЕНИЯ, содержащий феррозондовый преобразователь углов курса, крена и дифферента, установленный в корпусе в карданном подвесе, а также гидроакустические преобразователи, размещенные на наклонных стойках в торцевой части корпуса, причем каждый гидроакустический преобразователь состоит из плоских пьезоэлементов, соединенных через коммутатор с входом акустического измерительного преобразователя, а выходы акустического измерительного преобразователя и феррозондового преобразователя соединены с входом вычислителя, отличающийся тем, что, с целью повышения точности измерений и упрощения конструкции, четыре гидроакустических преобразователя размещены на концах четырех наклонных стоек, при этом первый и второй гидроакустические преобразователи установлены по оси, параллельной оси внешнего кольца, а третий и четвертый гидроакустические преобразователи по оси, параллельной оси внутреннего кольца карданного подвеса ферозондового преобразователя, причем каждый гидроакустический преобразователь выполнен в виде двух пьезоэлементов, плоскости которых расположены под углом 120o.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| TS - AJSM - L | |||
| Aconstic current moter | |||
| J | |||
| of the Oceanograpkical Society of Japan vol | |||
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
| Jnformation. | |||
