Изобретение относится к вычислительной технике и автоматике и может быть использовано в системах управления станками, в частности в системах автоматизации проектных и пусконаладочных работ при разработке и изготовлении оборудования с цикловым режимом работы.
Цель изобретения - оптимизация процесса программирования и диагностика неисправностей.
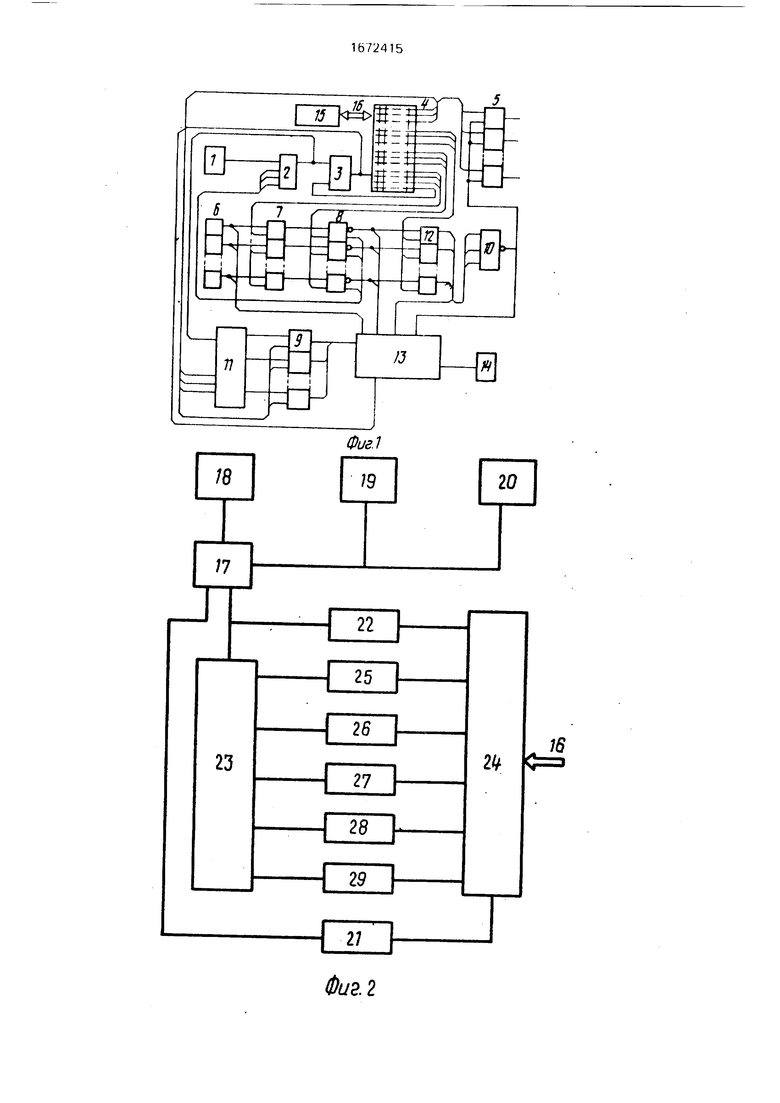
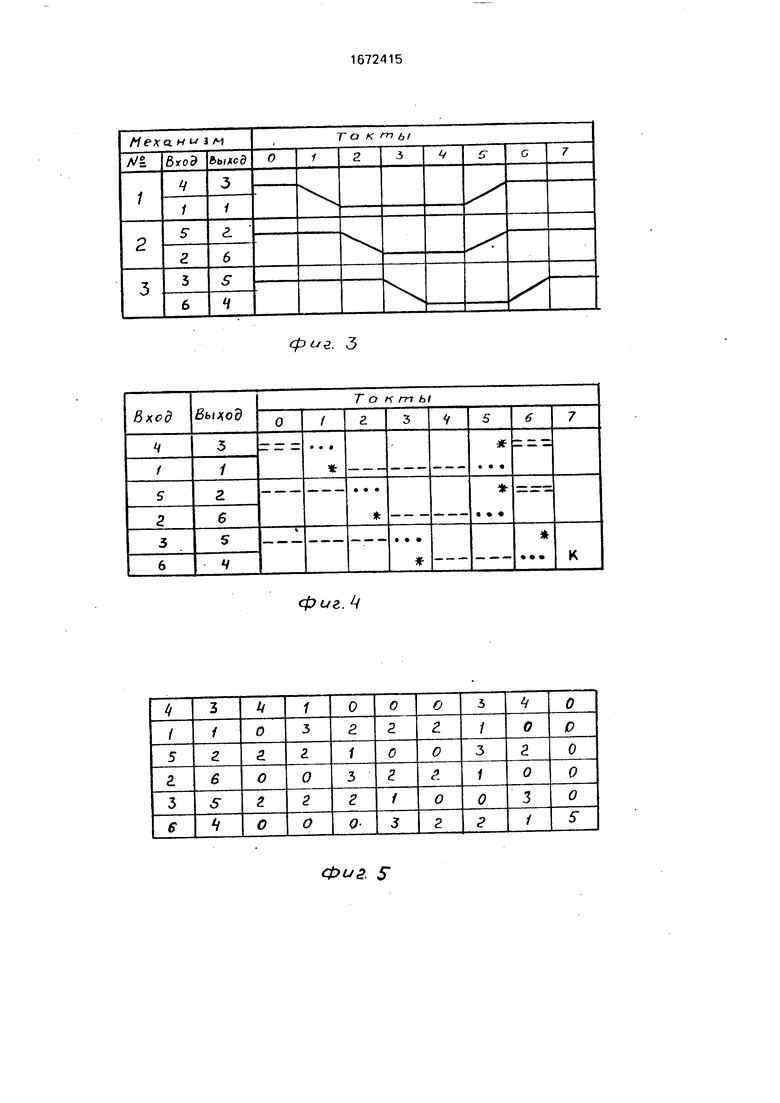
На фиг. 1 представлена блок-схема предлагаемой системы; на фиг 2 представлен пример реализации устройства программирования; на фиг. 3 - пример тактограммы объекта управления из трех механизмов, на фиг 4 показана данная тактог- рамма,выполненнаяна
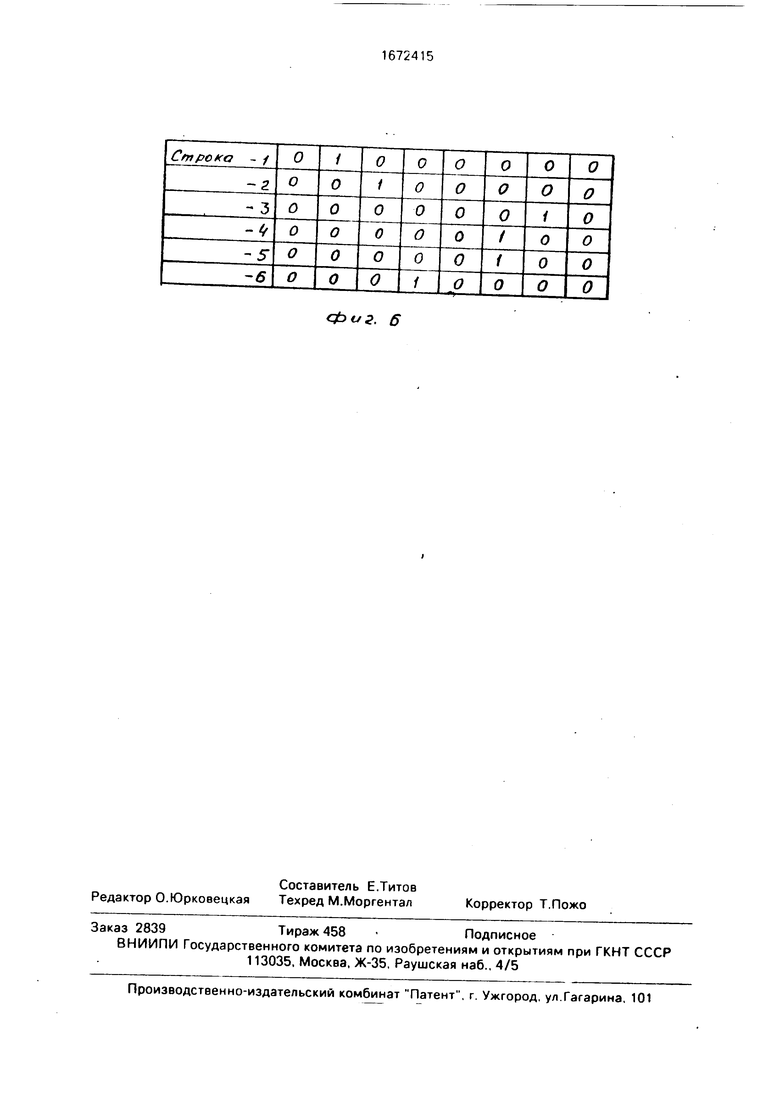
буквенно-цифровом видеотерминальном устройстве, на фиг 5 представлено оцифрованное изображение тактограммы, на фиг 6 - область данных блока программ, соответствующая маскируемым входам
Система автоматического управления и отладки содержит последовательно соединенные генератор 1 импульсов, элемент И 2 и счетчик импульсов 3. а также блок 4 хранения программ, группу элементов И 5 датчики 6 состояния объекта, блок 7 элементов
Os VJ
Ю Јь
сл
ИЛИ, элементы ЭКВИВАЛЕНТНОСТЬ 8, первый блок 9 вычитания, элемент ИЛИ-НЕ 10, регистр 11 запоминания предыдущего такта, второй блок 12 вычитания, коммутатор 13 сигналов индикации, индикатор 14, устройство 15 перепрограммирования, интерфейсную связь 16. Блок хранения программ 4 представляет собой матричное запоминающее устройство. Строки матрицы разделены на отдельные области в соответствии с назначением: область данных о состоянии выходов(включен или выключен); область данных о состоянии входов (включен или выключен); отдельная с(рока для сигнала об окончании цикла (последний такт цикла); область данных о маскировании сигналов датчиков (неопределенное состояние датчика в данном такте) и область данных о датчиках переключения в новые такты. Выходы блока 4 программ представляют собой выходы строк вышеуказанных областей данных. Номер столбца матрицы, подключаемого к выходам, определяется информацией на входе блока 4 программ. Причем номера столбцов матрицы соответствуют номерам состояний счетчика 3 и номерам тактов тактограммы объекта управления. Блок 7 элементов ИЛИ содержит набор двухвходовых элементов ИЛИ. Первые входы элементов подключены к блоку 4 хранения программ, а вторые - к выходам соответствующих датчиков 6. При маскировании сигналов датчиков 6 на первом входе элемента ИЛИ наблюдается единичный сигнал, т.е. при любом сигнале датчика 6 на выходе элемента ИЛИ имеется единичный сигнал. При нулевом сигнале на первом входе элемента ИЛИ сигнал на выходе соответствует сигналу датчика 6. Блоки 9 и 12 вычитания содержат схемы поразрядного вычитания сигналов первых входов из сигналов вторых входов (т.е. без заема из старших разрядов). Коммутатор 13 служит для формирования и передачи на индикатор 14 информации о входных сигналах. Соответственно при нулевом сигнале на управляющем входе, который подключен к выходу элемента ИЛИ-НЕ 10, осуществляется передача информации с выходов первого блока 9 вычитания, а при единичном сигнале - с выходов второго блока 12 вычитания и элементов ЭКВИВАЛЕНТНОСТЬ 8. Передача информации с выходов счетчика 3 на индикатор 14 осуществляется коммутатором 13 постоянно и не зависит от сигнала на управляющем входе. Дополнительно коммутатор 13 передает сигналы датчиков 6, указываемых в индикатируемой информации с выходов элементов ЭКВИВАЛЕНТНОСТЬ 8 или первого блока 9 вычитания. Коммутатор 13
можно выполнить на основе логических элементов И и ИЛИ. Устройство 15 перепрограммирования содержит управляющую вычислительную машину 17, сопряженную с
видеотерминальным устройством 18, запоминающим устройством 19 программ и запоминающим устройством 20 тактограммы. Кроме того, к ней подключены блок 21 управления, блок 22 формирования адреса и
0 блок 23 дешифрации. Выходы блоков 21-23 заведены в блок 24 связи. Причем выходы блока 23 дешифрации заведены в блок 24 связи через промежуточные регистры состояний: регистр 25 состояния выхода, ре5 гистр 26 состояния входа, регистр 27 маски, регистр 28 указание датчиков переключения цикла и регистр 29 сигнала окончания цикла. Выходом устройства 15 является выход блока 24 связи: он сопряжен интерфей0 сной связью 16 с блоком 4 хранения программ.
Система работает следующим образом. Перед началом работ по отладке объекта управления по тактограмме (см. фиг. 3) на
5 экране видеотерминального устройства 18 воспроизводят изображение тактограммы (см фиг. 4). При этом пользуются условными обозначениями
- - указанный в начале строки вход в
0 данном такте включен:
... - указанный в начале строки вход в данном такте маскируется (т.е. его состояние неопределенно и его не учитывают); - указанный в начале строки вход в
5 данном такте включается и переключается цикл в новый такт, указанный в начале строки выход включен;
- указанные в начале строки вход и выход включены;
0к -- конец цикла,
пробел соответствует выключенному состоянию входов и выходов.
После воспроизведения тактограммы управляющая вычислительная машина 17
5 переносит информацию (цифровую запись) о введенном изображении из памяти видеотерминального устройства 18 в запоминающее устройство 19 программ для хранения. Затем переписывают ее построч0 но в запоминающее устройство 20 тактограммы следующим образом. В первую ячейку памяти строки машина 17 записывает номер входа (порядковый номер датчика 6). во вторую ячейку памяти номер выхода
5 (порядковый номер второго элемента И 5). В последующие ячейки заносит цифровой код условного обозначения, т.е. третью ячейку вносит код условного обозначения нулевого такта, в четвертую ячейку код первого такта и далее. Например, если условное обозначение ... имеет код 1, обозначение - код 2 и, соответственно, код 3, код 4, к - код 5, а пробел - код 0, то изображение тактограммы (см. фиг. 4) соответствует оцифрованному изображению (см. фиг. 5) в запоминающем устройстве 20 тактограммы Блок 21 управления синхронизирует работу между управляющей вычислительной машиной 17 и блоком 24 связи, а далее по интерфейсной связи 16 с блоком 4 хранения программ. Для этого по команде блока 21 управления управляющая вычислительная машина 17 считывает последовательно данные из строк запоминающего устройства 20 и передает их в блок 22 формирования адреса и блох 23 дешифрации. В блоке 22 формирования адреса запоминают номера входа и выхода из первой и второй ячейки строки. Блок 23 дешифрации в соответствии с поступившими данными записывает в регистры 25-29 единичные сигналы при соответствии данных, а нулевые - при отличии. Так, единичные сигналы записывают в регистр 26 состояния входов при коде (-), 3 () и 4 (). В регистр 27 маски при коде 1 (...). В регистр 28 указания датчиков переключения - при коде 3 (). А в регистр 29 сигнала окончания цикла - при коде 5 (к). После обработки данных всей строки блок 21 управления выдает команду в блок 24 связи на перезапись данных из регистров в строки запоминающей матрицы блока 4 хранения программ. Адрес строки указывает блок 22 формирования адреса. Например, для первой строки тактограммы (см. фиг. 3) указаны вход № 4, а выход N 3. Соответственно, перезапись из регистра 25 состояния выхода блок 24 связи осуществляет в третью строку области данных состояния выхода блока 4 программ. Данные регистров 26-28 переписывают в четвертые строки соответствующих областей данных, а данные регистра 29 окончания цикла - в строку данных об окончании цикла. Далее вышеописанным способом блок 21 управления выдает команду на обработку следующей строки и так далее до последней строки. При этом в блок 4 хранения программ записывается вся необходимая для дальнейшей обработки информация, к примеру, информация о маскировании входов (см. фиг. 6). После этого система управления готова к непосредственной работе с обьектом управления. Для начала автоматического цикла объект управления приводят в исходное состояние в соответствии с тактом в О тактограммы. При этом с выходов блока 4 хранения программ поступает информация, соответствующая нулевому столбцу. Сигналы датчиков 6 через схему маскирования (блок элементов ИЛИ 7) поступают на элементы ЭКВИВАЛЕНТНОСТЬ 8. Поскольку обьект в исходном состоянии, то все сигналы соответствуют заданным (кроме сигнала датчика 6. определяющего начало автоматического цикла). С элемента ЭКВИВАЛЕНТНОСТЬ 8, соответствующего данному датчику 6, поступает нулевой сигнал на элемент И 2. Он запрещает прохождение им0 пульсов генератора 1 на переключение счетчика 3. Далее включают названный датчик 6. Это приводит к изменению нулевого сигнала на единичный. Импульс генератора 1 через элемент И 2 переключает счетчик 3
5 в состояние 1. По команде счетчика 3 блок 4 хранения программ выдает на свои выходы информацию, записанную в первый столбец. После другой элемент ЭКВИВАЛЕНТНОСТЬ 8, соответствующий датчику 6
0 переключения в такт 2, фиксирует несоответствие сигналов и выдает нулевой сигнал, чем запрещает дальнейшее переключение счетчика 3. Одновременно сигналами о состоянии выходов через группу элементов И
5 5 включаются запрограммированные в такте 1 выходы. В процессе отработки команды сигналы переключают названный датчик 6 переключения в такт 2. Счетчик 3 устанавливается в состояние 2. а блок 4 хране0 ния программ выдает информацию из второго столбца. Вновь сигналы датчиков 6 не соответствуют заданным и так далее по циклу. По достижении последнего такта сигнал с выхода строки об окончании цикла
5 обнуляет счетчик 3 и цикл повторяется. Одновременно с переключением тактов контролируется процесс отработки, а именно из сигналов с инверсных выходов элементов ЭКВИВАЛЕНТНОСТЬ 8 вторым блоком 12
0 вычитания вычитаются сигналы с выхода блока 4 хранения программ, т.е. сигналы, указывающие, какие датчики 6 должны иметь неэквивалентное состояние, так как являются в данном такте датчиками 6 пере5 ключения в новый такт. Также определяется, какие выходы включаются именно в данном такте. Для этого сигнал о смене состояния счетчика 3 подается с выхода элемента И 2 на управляющий вход регистра
0 11. Регистр 11 принимает и хранит сигналы с блока 4 хранения программ, т.е. хранит информацию о том. какие выходы были включены в прежнем такте (до переключения в новый). Поэтому первый блок 9 вычи5 тания, вычитая из сигналов включения выходов с блока 4 хранения программ (сигналы нового такта) сигналы включения предыдущего такта, формируют на выходах единичные сигналы, соответствующие выходам, включенным именно в данном такте.
При этом, если элементы ЭКВИВАЛЕНТНОСТЬ 8 фиксируют несоответствие только запрограммированных датчиков 6, то на выходах второго блока 12 вычитания присутствуют нулевые сигналы, а на выходе элемента ИЛИ-НЕ 10 - единичные. Под воздействием данного сигнала коммутатор 13 обрабатывает сигналы с выходов элементов ЭКВИВАЛЕНТНОСТЬ 8 и первого блока 9 вычитания. На индикаторе 14 отражаются номера несоответствующих датчиков б и номера выходов, которые должны переключить данные датчики 6. Дополнительно коммутатор 13 по сигналу датчиков 6 формирует сообщение о состоянии индикатируе- мых датчиков 6 (включен или выключен) и номер такта, т.е. неисправность заключается либо в отказе указываемых датчиков 6, либо в отказе указываемых выходов. При неисправности, вызванной незапланированным ходом исполнительных механизмов или неисправностью датчиков 6, элементы ЭКВИВАЛЕНТНОСТЬ 8 фиксир-ют несоответствие сигналов незапланированных, как переключающие, датчиков 6. Соответственно, на выходах второго блока 12 вычитания наблюдаются единичные сигналы, а на выходе элемента ИЛИ-НЕ 10-сигнал нулевой. Он запрещает выдачу команд с выходов группы элементов И 5 на объект управления, чем предотвращает усугубление ситуации. Коммутатор 13 по сигналам с выхода второго блока 12 вычитания передает на индикатор 14 информацию о номерах датчиков 6, фиксирующих неисправность, и указывает их состояние. Технико-экономический эффект заключается в повышении функциональных возможностей системы. Введение блока 7 элементов ИЛИ позволяет не учитывать датчики 6, имеющие неопределенное состояние в такте. Включение в схему второго блока 12 вычитания позволяет определить номера датчиков 6, которые имеют состояние, отличное от запрограммированного. Наличие незапрограммированных датчиков 6 в такте учитывается введением элемента ИЛИ-НЕ 10. Регистр 11 запоминает предыдущее состояние выходов, а первый блок 9 вычитания определяет выходы, включенные именно в данном такте. Коммутатор 13 позволяет формировать и передавать на индикатор 14 необходимую информацию о входных сигналах. Устройство 15 программирования по изображению тактограммы вводит данные в блок 4 хранения программ. Применение системы позволяет существенно упростить процедуру
программирования и одновременно обеспечить индикацию неисправностей Формула изобретения Система автоматического управления и
отладки на основе отображения тактограммы, содержащая генератор импульсов, выход которого соединен с первым входом, элемент И. счетчик импульсов, блок хранения программ, группу элементов И, а
также датчики состояния объекта, индикатор и блок элементов ЭКВИВАЛЕНТНОСТЬ, группа прямых выходов которого соединена с группой элемента И, а первая группа входов - с первой группой выходов
блока хранения программ, выход управления которого соединен с входом обнуления счетчика импульсов, отличающаяся тем, что, с целью оптимизации процесса программирования и диагностики неисправностей, в нее дополнительно введены группа элементов ИЛИ два блока вычитания, элемент ИЛИ-НЕ, коммутатор сигналов индикации, регистр запоминания предыду- .щего такта и устройство перепрограммирования, выход которого через интерфейсную связь соединен с входом устройства перепрограммирования, а вторая группа выходов блока хранения программ соединена с первой группой входов первого блока вычитания и группой информационных входов регистра запоминания предыдущего такта, третья группа выходов блока хранения программ соединена с первыми входами элементов ИЛИ группы а его четвертая группа
выходов - с первой группой входов второго блока вычитания, выходы датчиков состояния объекта, вторые выходы первого и второго блоков вычитания, группа инверсных выходов блока элементов ЭКВИВАЛЕНТНОСТЬ, а также выход счетчика импульсов и элемента ИЛИ-НЕ соединены соответственно с группой информационных входов коммутатора сигналов индикации, выход которого соединен с индикатором, а управляющий вход
- с выходом счетчика импульсов, выход элемента И соединен с управляющим входом записи регистра запоминания предыдущего такта, выходы которого соединены с второй группой первого блока вычитания, выходы элементов
ИЛИ группы соединены с второй группой блока элементов ЭКВИВАЛЕНТНОСТЬ, группа инверсных выходов которого соединена с второй группой входов второго блока вычитания, группа выходов которого соединена с
соответствующими входами элемента ИЛИ- НЕ, выход которого соединен с вторыми входами элементов И группы
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство центрального управления процессора | 1983 |
|
SU1136177A1 |
| Потоковый параллельный процессор | 1987 |
|
SU1608682A1 |
| Устройство для селекции изображений объектов | 1983 |
|
SU1188765A1 |
| Многокомпонентные аэродинамические весы с вычислительным устройством | 1961 |
|
SU150301A1 |
| Многоканальное устройство для програмного управления | 1980 |
|
SU875339A1 |
| Устройство для контроля электромонтажа | 1989 |
|
SU1688263A1 |
| Устройство для решения систем ли-НЕйНыХ уРАВНЕНий | 1978 |
|
SU813446A1 |
| Устройство для тестового контроля цифровых блоков | 1987 |
|
SU1425680A2 |
| Устройство для селекции изображений объектов | 1989 |
|
SU1777651A3 |
| Распределенная система для программного управления технологическими процессами | 1988 |
|
SU1605212A1 |
Изобретение относится к вычислительной технике и автоматике и может быть использовано в системах управления станками, в частности в системах автоматизации проектных и пусконаладочных работ при разработке и изготовлении оборудования с цикловым режимом работы. Цель изобретения - оптимизация процесса программирования и диагностики неисправностей. Для достижения указанной цели в систему автоматического управления и отладки дополнительно введены группа элементов ИЛИ, которые позволяют учитывать состояние датчиков состояния объектов, имеющие неопределенное состояние в такте, два блока вычитания, позволяющие определить номера таких датчиков, имеющих состояние, отличное от запрограммированного, и определить выходы, включенные именно в данном такте, элемент ИЛИ-НЕ, учитывающий наличие незапрограммированных датчиков в такте, регистр 11 запоминания предыдущего такта, т.е. состояния выходов, коммутатор 13, который позволяет сформировать и передать на индикатор 14 всю информацию о входных сигналах, устройство перепрограммирования, которое по изображению тактограммы вводит данные в блок хранения программ. 6 ил.
Фиг. 2
20
. 3
фиг.Ц
Фиг. 5
Фиг. 6
| Устройство для отображения графической информации | 1984 |
|
SU1327090A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для программного управления | 1984 |
|
SU1167585A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
