Изобретение относится к робототехнике, в частности к шарнирам манипуляторов и промышленных роботов с электромеханическим приводом.
Целью изобретения является расширение технологических возможностей за счет увеличения сферической области позиционирования частей шарнира одна относительно другой.
На фиг. 1 изображен шарнир с первым вариантом выполнения электромагнитов, общий вид; на фиг. 2 - то же, с вторым вариантом выполнения электромагнитов; на фиг. 3 - разрез А-А на фиг. 2.
Шарнир манипулятора состоит из двух частей, одна из которых выполнена в виде сферы 1 с установленными в ней электромагнитами, имеющими обмотки 2 и сердечники 3 цилиндрической формы в первом варианте (фиг. 1) или обмотки 4 и сердечники 5 во втором варианте, а другая часть выполнена в виде постоянного магнита 6, взаимодействующего одним из своих полюсов с электромагнитами сферы. На сфере шарнирно закреплена одним концом первая дуга 7 с возможностью ее поворота вокруг оси сферы, другой конец которой шарнирно связан с одним из концов второй дуги 8, установленной с возможностью поворота ее свободного конца, на котором закреплен постоянный магнит 6, в плоскости, совпадающей с осью поворота дуги 7.
Шарнир манипулятора при выполнении электромагнитов по первому варианту (фиг. 1) работает следующим образом.
В исходном положении постоянный магнит притянут к одному из сердечников 3, электромагниты обесточены.
Для перемещения одной части шарнира относительно другой, т.е. постоянного магнита 6 относительно сферы 1, на обмотку заданного электромагнита подается питающее напряжение.
Вокруг сердечника 3 этого электромагнита возникает магнитное поле, которое взаимодействует с магнитным полем постоянного магнита б. За счет притяжения разноименных полюсов включенного электромагнита и постоянного магнита 6 последний, вращаясь вместе с дугой 8 по меридианам сферы и с дугами 8 и 7 по параллелям сферы, изменяет свое положение в пространстве и притягивается к сердечнику 3 включенного электромагнита. Для более эффективного перемещения постоянного магнита 6 в обмотку 2 электромагнита, соответствующего исходной позиции шарнира, нужно подать питающее напряжение, которое создает поле, отталкивающее постоянный магнит 6.
После отключения питающего напряже
ния магнитное поле вокруг сердечника 3 электромагнита исчезает, однако постоянный магнит 6 остается зафиксированным в своем новом положении за счет притяжения его к сердечнику 3.
Работа шарнира при выполнении электромагнитов по второму варианту осуществляется следующим образом.
При подаче напряжения к обмоткам 4 в сердечниках 5 будут концентрироваться три
магнитных поля, сдвинутых относительно друг друга, например, на 120°. Результирующим будет магнитное поле, образующееся в результате векторного сложения этих трех полей. Постоянный магнит 6 шарнира взаимодействует с результирующим вектором магнитного поля, совершая движения, аналогичные описанным.
Перераспределение величины питающих напряжений по трем обмоткам 4 будет
изменять величины магнитных потоков по сердечникам 5, а в итоге результирующий вектор будет менять свое положение в пространстве. Соответственно этому совершает движение постоянный магнит 6, т.е. в
этом случае возможно непрерывное перемещение второй части шарнира.
Формула изобретения
Шарнир манипулятора, состоящий из
двух частей, первая из которых выполнена в виде сферы с установленными в ней электромагнитами, имеющими сердечники, а вторая - в виде постоянного магнита, установленного с
возможностью поворота вокруг центра сферы и магнитного взаимодействия одним из своих по- люсов с электромагнт-ами сферы, отличающийся тем, что, с целью расширения технологических возможностей за счет увеличения сферической области позиционирования частей шарнира одна относительно другой, он снабжен двумя, расположенными внесферы первой части дугами, один конец первой из которых шарнирно связан со сферой с возможностью
поворота этой дуги вокруг оси сферы, а другой конец - шарнирно связан с концом второй дуги, установленной с возможностью поворота ее свободного конца в плоскости, совпадающей с осью поворота первой дуги, при
этом постоянный магнит установлен -на свободном конце второй дуги.
AL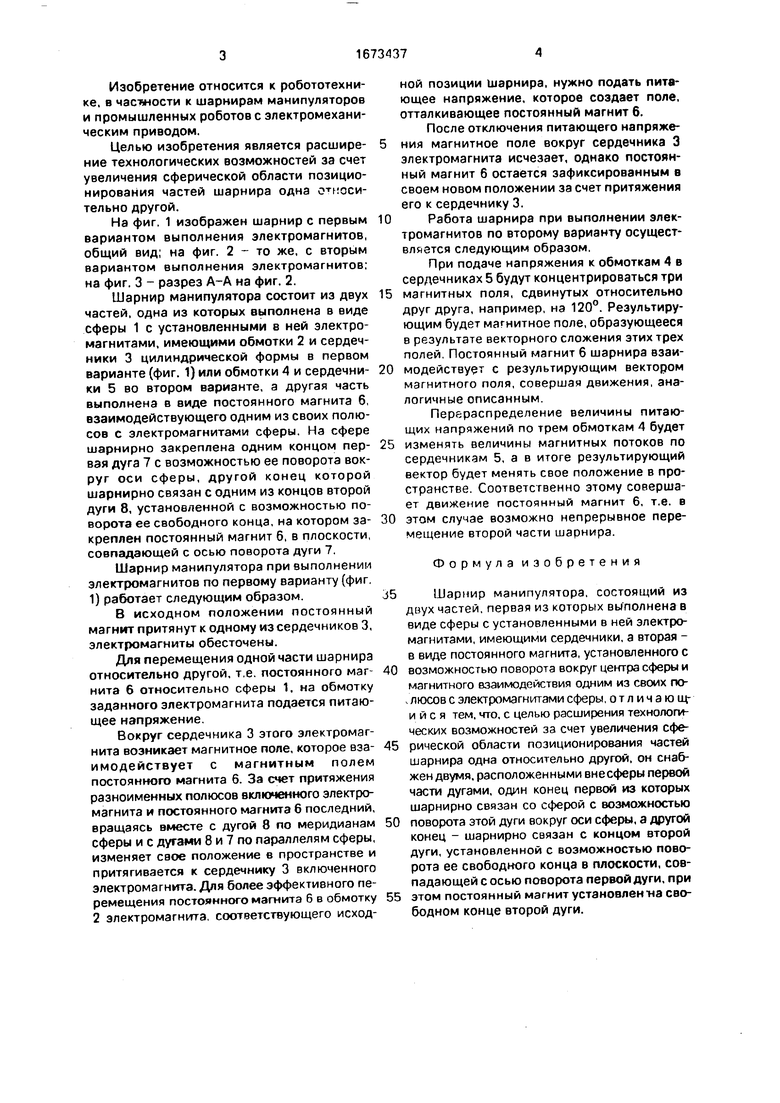
| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнир манипулятора | 1985 |
|
SU1288058A1 |
| УСТРОЙСТВО С МАГНИТНЫМ ВЗАИМОДЕЙСТВИЕМ ДЛЯ ПЕРЕМЕШИВАНИЯ ЖИДКОСТИ | 1999 |
|
RU2222372C2 |
| МАНИПУЛЯТОР | 2008 |
|
RU2403145C2 |
| Привод поворота кинематических звеньев | 1990 |
|
SU1757865A1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) | 2006 |
|
RU2316882C1 |
| ЭЛЕКТРОМАГНИТОИМПУЛЬСНЫЙ ДВИГАТЕЛЬ | 2018 |
|
RU2699026C1 |
| СИСТЕМА И СПОСОБ ПОЛЕВОЙ ЭМИССИИ | 2009 |
|
RU2516254C2 |
| Рука робота | 1985 |
|
SU1284819A1 |
| Механическая рука | 1981 |
|
SU1096093A1 |
| Электромагнитный захват | 1982 |
|
SU1074800A1 |
Изобретение относится к робототехнике, в частности к шарнирам манипуляторов и промышленных роботов с электромеханическими приводами. Целью изобретения является расширение технологических возможностей за счет увеличения области позиционирования частей шарнира. Для взаимного перемещения и позиционирования частей шарнира на обмотку 2 одного из электромагнитов подается питающее напряжение, создающее магнитное поле, взаимодействующее с полем постоянного магнита 6 за счет притяжения разноименных полюсов электромагнита и постоянного магнита 6, который изменяет свое положение в пространстве, перемещаясь вместе с дугой 8 по меридианом сферы 1 и с дугами 7 и 8 - по параллелям этой сферы. 3 ил.
| Шарнир манипулятора | 1985 |
|
SU1288058A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
