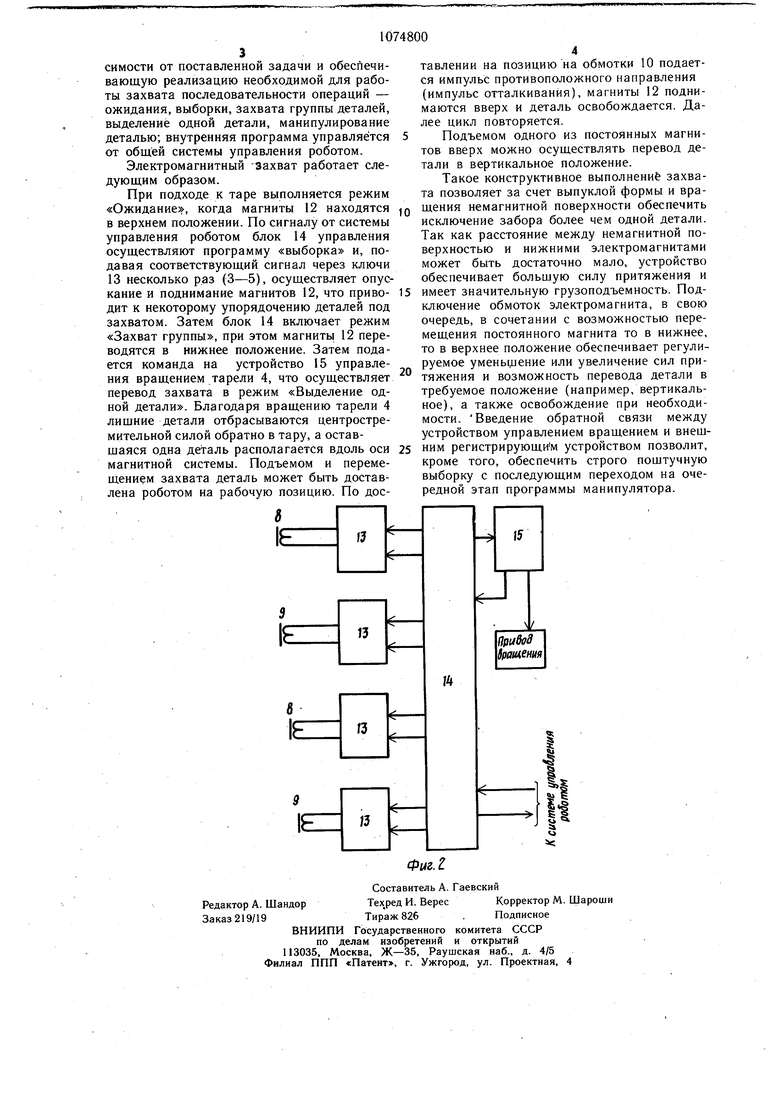
Изобретение относится к робототехнике, в частности к электромагнитным схватам манипуляторов, предназначенным для поштучной выборки с ориентацией продолговатых ферромагнитных деталей и их последующего перемещения. Известно магнитное захватное устройство, содержащее закрепленные в цилиндрическом корпусе высокоэрцитивные постоянные магниты, между которыми расположены магнитопроводы, выполненные в виде Q вертикальных стержней треугольного сечения, нижняя поверхность которых является рабочей захватной поверхностью, а обмотки возбуждения размещены на каждом магнитопроводе в его нижней части между рабочей поверхностью и постоянными магнита- 15 ми; в устройстве имеется специальный щуп, позволяющий снимать сигнал о наличии детали на рабочей захватной поверхности. Устройство предназначено для захвата и транспортировки деталей за их внутреннюю ,, поверхность 1. Однако захват не в состоянии обеспечить ни выборку деталей из навала, ни их последующую ориентацию. Для его функционирования необходима подача деталей по одной поверхности в определенном положении, 25 так как он может притянуть деталь не только за концы, но и за кромку, а также одновременно притянуть группу деталей. Кроме того, в захвате для распределения детали используется принцип создания противо-ЭДС, что, в свою очередь, повыщает 0 возможность возникновения эффекта перекомпенсации, т. е. требует высокой точности значения создаваемого противополя. Наиболее близким к изобретению по технической сущности является электромагнит- 35 ный захват, содержащий две электромагнитные системы с обмотками возбуждения. Захват позволяет осуществить кроме захвата контроль наличия одной или нескольких деталей на позиции отработки по изменению до емкости между токопроводящими элементами 2. , „ Однако из-за наличия постоянной жесткои связи между разнесенными по горизонтали частями электромагнитной системы рас- 45 пределение магнитного потока в процессе захвата детали осуществляется через деталь по дуге магнитопровода, что исключает возможность ориентирования детали в вертикальнои плоскости и ограничивает манипулиоование ею. лирование ею. Наличие немагнитных частей в магнитопроводе увеличивает немагнитный зазор между деталью и захватом, что приводит к рассеянию поля и потере в силах притяжения. Кроме того, в известном захвате не ис ключена возможность прилипания по крайней мере двух деталей из-за ограничитель55 ных возможностей изменения сил притяжения в точных пределах. Целью изобретения является расщирение функциональных возможностей путем обеспечения поштучной выборки и ориентации изделий. Поставленная цель достигается тем, что в электромагнитном захвате, преимущественно для удлиненных ферромагнитных деталей, содержащем две электромагнитные системы с обмотками возбуждения, электромагниты каждой системы расположены один над другим с зазором, а захват снабжен подвижными в вертикальной плоскости постоянными магнитами, размещенными по одному в зазоре между электромагнитами каждой системы, и смонтированной с возможностью вращения в горизонтальной плоскости под рабочей поверхностью нижних электромагнитов обеих систем тарелью, выполненной из немагнитного материала и обращенной выпуклостью вниз. На фиг. 1 изображен конструктивный вариант магнитного захвата; на фиг. 2 - схема управления работой захвата. Магнитный захват содержит неподвижный корпус 1, в котором на подшипниках 2 установлен вал 3, к нижнему торцу которого жестко крепится выпуклая немагнитная поверхность - тарель 4. Целесообразно выполнять поверхность с небольщим конусом для проскальзывания детали и, следовательно, более точного ориентирования. Верхний торец вала 3 связан с приводом вращения (не показан). К корпусу захвата прикреплены две направляющие пластины 5 и 6, разнесенные по вертикали, на каждой из которых симметрично относительно вала 3 размещены по два одинаковых электро .. „ . магнита 7 и 8 с соответствующими обмотками 9 и 10 возбуждения. Между парами электромагнитов 7 и 8 на осях 11 жестко закреплены с возможностью перемещения между электромагнитами постоянные магниты 12 соответственно. Для увеличения силы притяжения магниты 12 обращены вниз противоположными полюсами. Обмотки 9 и 10 подключены через соответствующие электронные ключи 13 к блоку 4 управления (фиг. 2) с возможностью „одачи токового импульса в прямом или об направлении для перевода постоян магнитов 12 в верхнее или нижнее поло „„ блоком 14 управления связано устройство 15 управления вращением тарелью котором присутствуют элементы контро . . ля вращением (датчики контроля вращения, положения тарели, счетчик числа оборотов и схема обработки сигналов датчиков, эти элементы на блок-схеме условно не обозначены). Устройство 15 имеет с блоком 14 управления обратную связь. Кроме того, блок 14 управления имеет внутреннюю программу, изменяемую в зависимости от поставленной задачи и обеспечивающую реализацию необходимой для работы захвата последовательности операций - ожидания, выборки, захвата группы деталей, выделение одной детали, манипулирование деталью; внутренняя программа управляется от общей системы управления роботом. Электромагнитный -захват работает следующим образом. При подходе к таре выполняется режим «Ожидание, когда магниты 12 находятся в верхнем положении. По сигналу от системы управления роботом блок 14 управления осуществляют программу «выборка и, подавая соответствующий сигнал через ключи 13 несколько раз (3-5), осуществляет опускание и поднимание магнитов 12, что приводит к некоторому упорядочению деталей под захватом. Затем блок 14 включает режим «Захват группы, при этом магниты 12 переводятся в нижнее положение. Затем подается команда на устройство 15 управления вращением тарели 4, что осуществляет перевод захвата в режим «Выделение одной детали. Благодаря вращению тарели 4 лишние детали отбрасываются центростремительной силой обратно в тару, а оставшаяся одна деталь располагается вдоль оси магнитной системы. Подъемом и перемещением захвата деталь может быть доставлена роботом на рабочую позицию. По доставлении на позицию на обмотки 10 подается импульс противоположного направления (импульс отталкивания), магниты 12 поднимаются вверх и деталь освобождается. Далее цикл повторяется. Подъемом одного из постоянных магнитов вверх можно осуществлять перевод детали в вертикальное положение. Такое конструктивное выполнение захвата позволяет за счет выпуклой формы и вращения немагнитной поверхности обеспечить исключение забора более чем одной детали. Так как расстояние между немагнитной поверхностью и нижними электромагнитами может быть достаточно мало, устройство обеспечивает большую силу притяжения и имеет значительную грузоподъемность. Подключение обмоток электромагнита, в свою очередь, в сочетании с возможностью перемещения постоянного магнита то в нижнее, то в верхнее положение обеспечивает регулируемое уменьшение или увеличение сил притяжения и возможность перевода детали в требуемое положение (например, вертикальное), а также освобождение при необходимости. Введение обратной связи между устройством управлением вращением и внешним регистрирующим устройством позволит. кроме того, обеспечить строго поштучную выборку с последующим переходом на очередной этап программы манипулятора.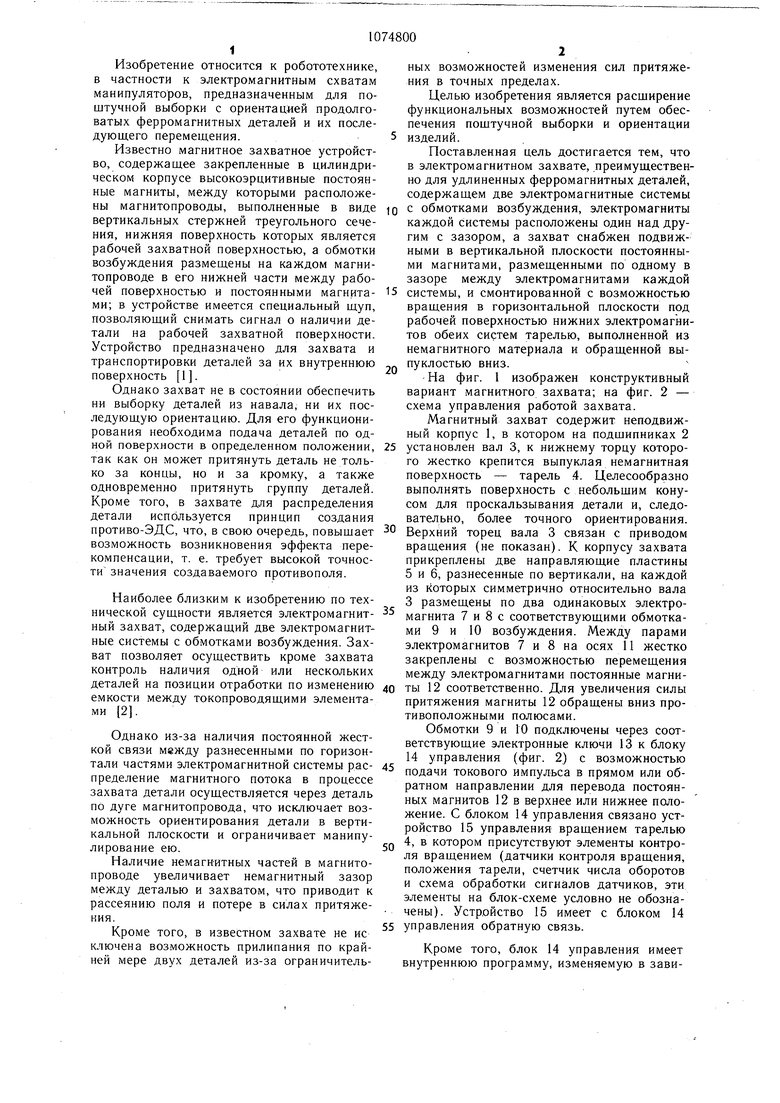
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поштучной выдачи ферромагнитных плоских деталей | 1990 |
|
SU1764746A1 |
| Устройство для транспортирования и накопления ферромагнитных деталей | 1986 |
|
SU1313630A1 |
| Захват манипулятора | 1983 |
|
SU1090548A1 |
| Устройство для перемещения материала | 1986 |
|
SU1355331A1 |
| Устройство для размагничивания | 1988 |
|
SU1513531A1 |
| Электромагнитный захват | 1986 |
|
SU1440708A1 |
| Устройство для поштучной выдачи деталей | 1983 |
|
SU1143573A1 |
| Автомат для сборки деталей | 1984 |
|
SU1234151A1 |
| Грузоподъемный электромагнит | 1986 |
|
SU1435525A1 |
| РЕЛЬСОВЫЙ ТОРМОЗ С ПОСТОЯННЫМИ МАГНИТАМИ | 2000 |
|
RU2185984C2 |
ЭЛЕКТРОМАГНИТНЫЙ ЗАХВАТ преимущественно для удлиненных ферромагнитных деталей, содержащий две электромагнитные системы с обмотками возбуждения, отличающийся тем, что, с целью расщирения функциональных возможностей путем обеспечения поштучной выборки и ориентации изделий, электромагниты каждой системы расположены один над другим с зазором, а захват снабжен подвижными в вертикальной плоскости постоянными магнитами,размещенными по одному в зазоре между электромагнитами каждой системы, и смонтированной с возможностью вращения в горизонтальной плоскости под рабочей поверхностью нижних электромагнитов обеих систем тарелью, выполненной из немагнитного материала и обращенной выпуклостью вниз. (Л 4 00 ФмгЛ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР № 755741, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электромагнитный захват | 1978 |
|
SU787333A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
