г1
Изобретение относится к робототехнике и может быть использовано для механизации и автоматизации основных и вспомогательных операций в различных отраслях машино- и при- боростроения,
Цель изобретения - расширение технологических возможностей робота за счет увеличения его зоны обслуживания.
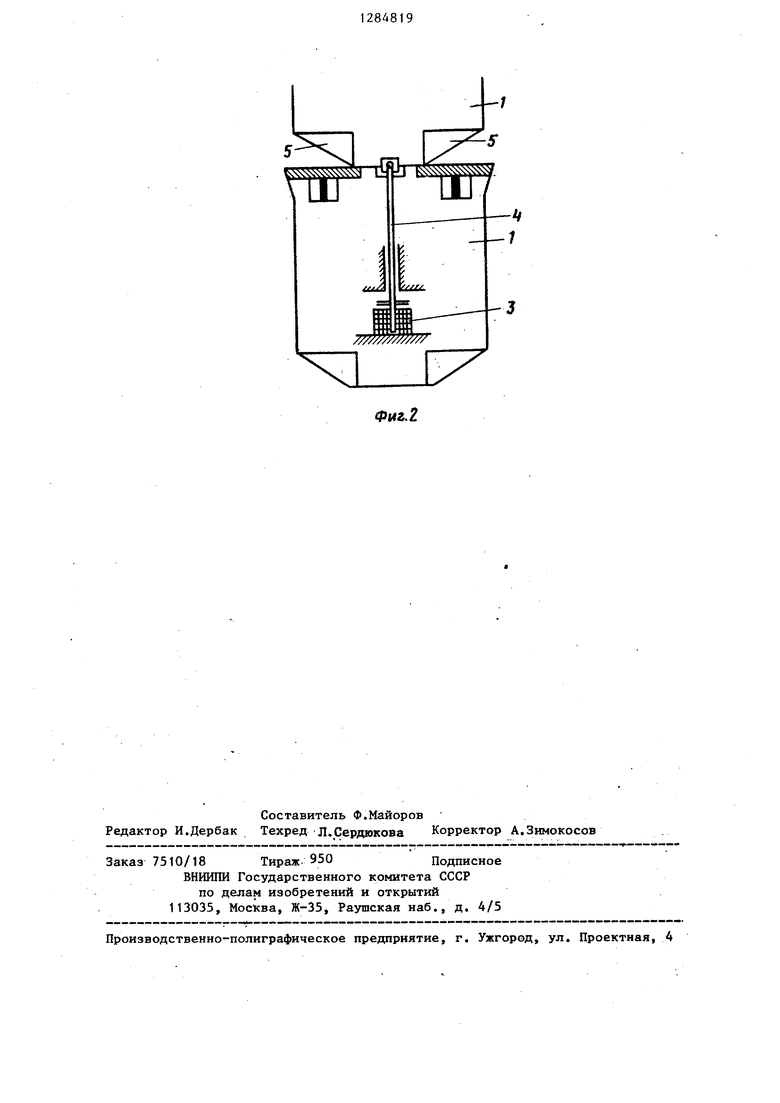
На фиг. 1 изображены модули руки при их относительном повороте на фиг. 2 - то же, при соосном поло- жении.
Устройство содержит последова- тельно установленные и шарнирио меж- ду собой связанные модули 1. На одном конце каждого модуля расположены электромагниты 2, полюса которых образуют торцовую поверхность. Внутри каждого модуля 1 расположен привод линейного перемещения, например электромагнит 3 с обмоткой и якорем, соединенными со штоком 4. Второй конец модулей 1 имеет форму усеченной пирамиды, боковые грани которой образованы полюсами постоянных магнитов 5, а верхнее основание шарнирно связано с концом штока 4 соседнего модуля
с возможностью поворота модуля в пло
костях, перпендикулярных граням пирамиды. Шток А подпружинен к электромагниту 3 с помощью пружины 6, один конец которой закреплен на штоке, а другой - на электромагните.
Рука работает следующим образом.
В исходном положении модули 1 руки робота образуют прямую за счет отключения электромагнитов 2 и включения электромагнитов 3, которые втягивают штоки 4. ,
При включении одного из электромагнитов 2 модуля 1 между его полю
сом и полюсом противолежащего магни
О
5 20
V)
--
35
25
45
192
та 5 возникает сила магнитного притяжения. Затем при выключении электромагнита 3 шток А под действием пружины 6 поднимается, а модуль поворачивается под действием силы магнитного притя;;;ения. в .новое устойчивое положение (фиг. 1). Дпя возвращения его в исходное положение включается электромагнит 3, а включенный ранее электромагнит 2 реверсируется, в результате чего между включенным электромагнитом 2 и постоянным магнитом, расположенным напротив, возникает сила отталкиванчя, ускоряющая возвращение повернутого модуля 1 в исход- .ное положение.
Аналогично осуществляют поворот модуля в каждое из направлений, количество которых соответствует количеству граней пирамиды.
Формула изобретения
Рука робота, содержащая последовательно установленные и шарнирно связанные между собой модули, причем на одном конце каждого модуля установлены электромагниты, поверхности полюсов которых образуют торцовую поверхность этого модуля, о т- личающаяся тем, что, с целью расширения технологических возможностей, каждый модуль снабжен приводом линейного перемещения, имеющим шток, и постоянными магнитами, при этом другой конец каждого модуля име-, ет форму усечённой пирамиды, боковые грани которой образованы поверхностями полюсов постоянных магнитов, а меньшее основание усеченной пирамиды шарнирно связано с концом штока привода, расположенного в соседнем модуле с возможностью поворота модуля в плоскостях, перпендикулярных граням пирамиды.
Фиг. 2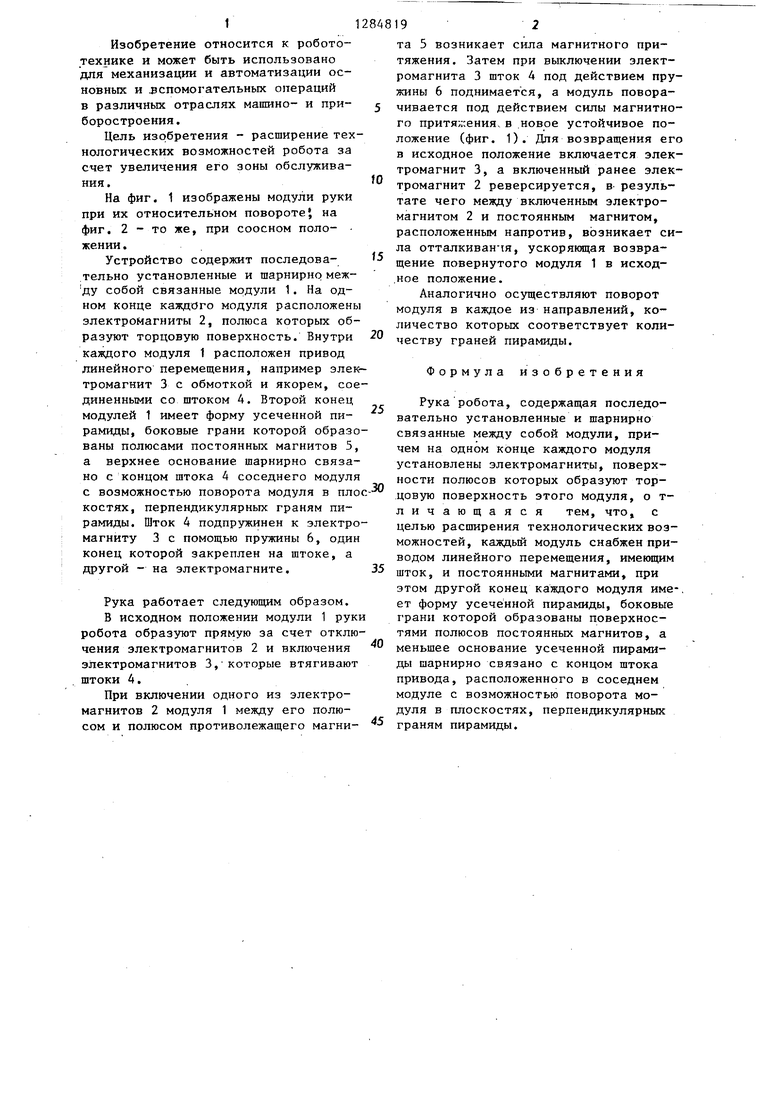
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука /ее варианты/ | 1985 |
|
SU1278210A1 |
| Рука робота | 1987 |
|
SU1458202A1 |
| Механическая рука | 1987 |
|
SU1451010A2 |
| Самоустанавливающаяся головка робота | 1984 |
|
SU1274902A1 |
| Привод поворота кинематических звеньев | 1990 |
|
SU1757865A1 |
| Механическая рука | 1987 |
|
SU1451009A2 |
| Механическая рука | 1981 |
|
SU1096093A1 |
| Электродвигатель | 1984 |
|
SU1321382A3 |
| Шарнир манипулятора | 1989 |
|
SU1673437A1 |
| СТАТОР ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА С ПОСТОЯННЫМИ МАГНИТАМИ | 1993 |
|
RU2061990C1 |
Изобретение относится к робототехнике и может быть использовано для механизации и автоматизации основных и вспомогательных операций в различных отраслях машино- и приборостроения. Целью изобретения является расширение технологических возможностей робота за счет увеличения его зоны обслуживания. Рука робота состоит из последовательно установленных и шар- нирнр между собой связанных модулей 1. На одном конце каждого модуля расположены электромагниты 2, полюса которых образуют торцовую поверхность. Другой конец модулей 1 имеет форму усеченной пирамиды, грани которой образованы полюсами постоянных магнитов 5. Кроме тоге, в каждом модуле 1 расположен шток 4 с приводом его линейного перемещения, например электромагнитом 3i. Шток 4 шарнирно связан с верхним основанием усеченной пирамиды соседнего модуля. Для относительного поворота соседних модулей выключается электромагнит 3 привода штока и включается один из электромагнитов 2, взаимодействующий с противолежащим постоянным магнитом 5, который под действием магнитных сил притягивается к полюсу электромагнита 2. Для возвращения в исходное положение включается электромагнит 3, а ток в электромагните 2 ревер- сируется. 2 ил. i (Л ю 00 4 00 )яяА CD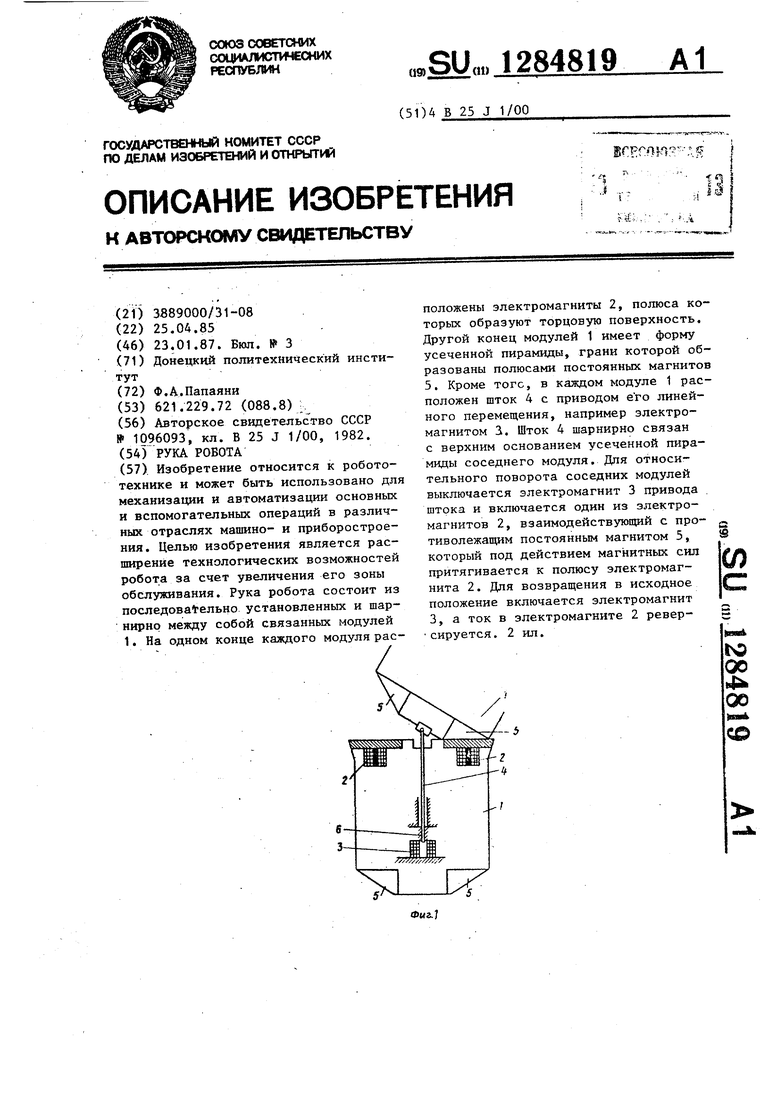
| Механическая рука | 1981 |
|
SU1096093A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
