Изобретение относится к машиностроению, а именно к цикловым манипуляторам для перемещения объектов из одной позиции в другую.
Наиболее близким по технической сущности и достигаемому результату к заявленному устройству является манипулятор по а.с. 1821353, содержащий основание, подвижное звено, выполненное в виде плоского упругого элемента, один конец которого жестко закреплен на основании, а на другом конце находится захват и закрепленные на основании в крайних точках движения звена фиксирующие электромагниты, состоящие из обмотки с сердечником и якоря, при этом якорь закреплен на подвижном конце звена. К его недостаткам можно отнести то, что при большом изгибе возникающее в звене напряжение может привести к необратимой пластической деформации и упругое звено потеряет свою первоначально плоскую форму, а при уменьшении жесткости звена могут возникнуть крутильные колебания вокруг оси звена, что приведет к дополнительным потерям энергии и снижению надежности работы.
Цель изобретения - повышение надежности работы манипулятора и расширение его рабочей зоны.
Указанная цель достигается тем, что в предлагаемом манипуляторе звено состоит из нескольких секций, соединенных последовательно с возможностью перемещения (например, поворота) относительно друг друга. Каждая секция состоит из стойки с жестко соединенными с ней плечами. На стойке и плечах закреплены постоянные магниты, ориентированные таким образом, что полюса магнитов, закрепленных на плечах, направлены навстречу одноименным полюсам магнита, расположенного на стойке предыдущей секции. Это приводит к возникновению сил отталкивания между соседними секциями. Первая от основания секция не имеет плеч, ее стойка с постоянным магнитом закреплена на основании. На последней от основания секции закреплен захват и якорь фиксирующих электромагнитов, которые расположены на основании в крайних точках движения звена. Постоянный магнит на стойке последней от основания секции отсутствует.
Проведенный заявителем поиск по научно-техническим и патентным источникам информации и выбранный из перечня аналогов прототип позволили выявить отличительные признаки в заявленном техническом решении, следовательно, заявленное устройство удовлетворяет критерию изобретения «новизна», а проведенный заявителем дополнительный поиск известных технических решений с целью обнаружения в них признаков, сходных с признаками отличительной части формулы заявленного технического решения, и сравнение свойств заявляемого и известных технических решений, обусловленных наличием в них указанных признаков, показал, что, во-первых, не все признаки отличительной части формулы найдены в известных технических решениях, во-вторых, сопоставительный анализ свойств, обусловленных наличием некоторых отличительных признаков в известных решениях и в заявленном техническом решении, показал, что у заявленного решения проявляются свойства, не совпадающие со свойствами, проявляемыми указанными признаками в известных технических решениях, чем обуславливается достижение заявленного положительного эффекта, следовательно, заявленное техническое решение удовлетворяет критерию изобретения «существенные отличия».
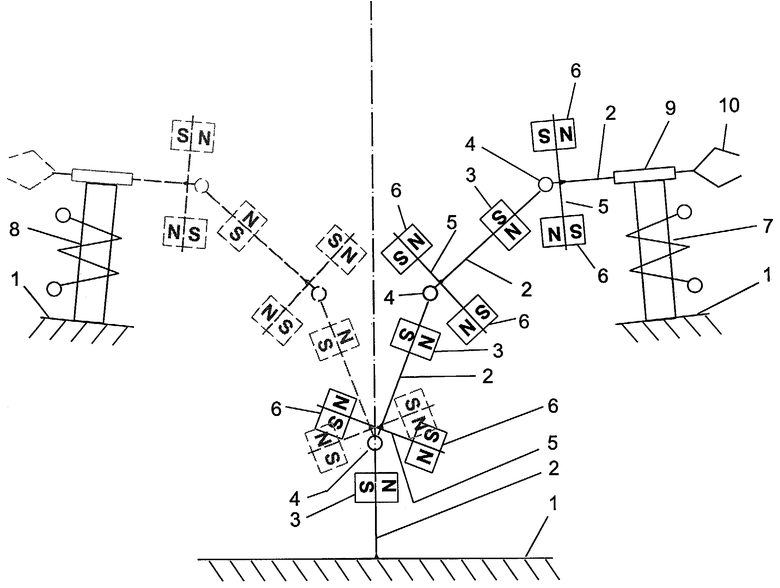
На чертеже изображена кинематическая схема предлагаемого манипулятора. На основании 1 жестко закреплена стойка 2 первой секции подвижного звена с закрепленным на ней постоянным магнитом 3. Стойка 2 связана со стойкой следующей секции шарниром 4, обеспечивающим возможность поворота следующей секции относительно предыдущей. Постоянные магниты 3 закреплены на каждой стойке 2, кроме последней секции. Со стойкой 2 жестко связаны плечи 5, на которых закреплены постоянные магниты 6. Магниты 6 ориентированы таким образом, что их полюса направлены навстречу одноименным полюсам магнита 3, расположенного на стойке 2 предыдущего звена. Это приводит к возникновению сил отталкивания между магнитами 6, закрепленными на плечах 5, и магнитом 3 на стойке предыдущей секции и из последовательности связанных шарнирами секций образуется единое упругое звено.
На основании 1 в крайних точках движения звена расположены фиксирующие электромагниты 7 и 8. Якорь электромагнитов 9 закреплен на стойке 2 последней секции. На последней секции также размещен захват 10. Вместо захвата на конце последней секции может располагаться узел крепления следующего звена или другой рабочий орган.
Манипулятор работает следующим образом.
В исходном состоянии звено изогнуто так, что якорь 8 притянут к электромагниту 7 (сплошные линии на чертеже), например, и удерживается силой притяжения, вызванной током, протекающим в обмотке электромагнита. При отключении напряжения питания от обмотки 7 и подаче напряжения на обмотку электромагнита 8 якорь 9, расположенный на последней секции звена, начинает двигаться влево (см. чертеж) под действием сил отталкивания расположенных на стойках и плечах постоянных магнитов 3 и 6. Происходит движение звена из одного крайнего положения в другое. Если бы потери энергии в шарнирах 4 были равны нулю, то якорь достиг бы второго электромагнита 8 (левого, см. чертеж), расположенного симметрично электромагниту 7 относительно нейтрального положения звена. При этом звено займет положение, показанное на чертеже пунктиром. Компенсация потерь энергии при движении звена также осуществляется работой сил притяжения электромагнита 8. После завершения движения якорь 9 фиксируется на электромагните 8, причем для фиксации звена требуется меньший ток через обмотку, что позволяет снизить напряжение питания при нахождении звена в крайнем положении, уменьшив потери энергии и нагрев обмотки электромагнита. Обратное перемещение звена и захвата осуществляется при отключении обмотки электромагнита 8 и подключении обмотки электромагнита 7 к источнику напряжения.
Таким образом, предлагаемый манипулятор позволяет увеличить зону обслуживания за счет увеличения кривизны изгиба звена, состоящего из шарнирно соединенных секций, исключив потерю формы звена из-за пластической деформации при большом изгибе, и устранить возможность возникновения крутильных колебаний звена при уменьшении его жесткости.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 2009 |
|
RU2410235C2 |
| ЦИКЛОВЫЙ МАНИПУЛЯТОР | 2008 |
|
RU2403142C2 |
| МАНИПУЛЯТОР | 2008 |
|
RU2403146C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2009 |
|
RU2412798C2 |
| РОБОТОТЕХНИЧЕСКАЯ УСТАНОВКА ДЛЯ ОБРАБОТКИ ДЕТАЛЕЙ | 2009 |
|
RU2415744C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ И КИНЕМАТИЧЕСКОЙ РАЗВЯЗКОЙ | 2010 |
|
RU2455147C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ И КИНЕМАТИЧЕСКОЙ РАЗВЯЗКОЙ | 2010 |
|
RU2455146C2 |
| Манипулятор | 1991 |
|
SU1821353A1 |
| Захват манипулятора | 1991 |
|
SU1816686A1 |
| МОТОР-КОЛЕСО | 1990 |
|
RU2035114C1 |
Изобретение относится к машиностроению, в частности к цикловым манипуляторам для перемещения объектов из одной позиции в другую. Манипулятор состоит из нескольких секций, соединенных последовательно с возможностью перемещения (например, поворота) относительно друг друга. Каждая секция состоит из стойки с жестко соединенными с ней плечами. На стойке и плечах закреплены постоянные магниты. Постоянные магниты ориентированы так, что одноименные полюса магнитов, закрепленных на плечах и на стойке предыдущей секции направлены навстречу друг другу. Первая от основания секция не имеет плеч и ее стойка с постоянным магнитом жестко закреплена на основании. На последней от основания секции закреплен захват и якорь фиксирующих электромагнитов, которые расположены на основании в крайних точках движения звена. Стойка последней от основания секции выполнена без постоянного магнита. Повышается надежность работы манипулятора, расширяется его рабочая зона за счет увеличения допустимой кривизны звена и исключаются крутильные колебания при уменьшении жесткости звена. 1 ил.
Манипулятор, содержащий основание, подвижное звено, один конец которого жестко закреплен на основании, захват, закрепленный на подвижном конце звена, и фиксирующие элементы, выполненные в виде электромагнитов, состоящих из сердечников с обмоткой, закрепленных на основании в крайних точках движения звена, и якоря, закрепленного на подвижном конце звена, отличающийся тем, что для расширения рабочей зоны и повышения надежности работы звено выполнено из нескольких секций, последовательно соединенных друг с другом с возможностью перемещения, например поворота, относительно друг друга, состоящих из стойки с жестко соединенными с ней плечами, на которых закреплены постоянные магниты, ориентированные таким образом, что полюса магнитов, закрепленных на плечах, направлены навстречу одноименным полюсам магнита, расположенного на стойке предыдущей секции, для возникновения сил отталкивания между соседними секциями, причем последняя от основания секция, на которой закреплены захват и якорь электромагнитов, выполнена со стойкой без постоянного магнита, а первая жестко закрепленная на основании секция состоит только из стойки с постоянным магнитом.
| Манипулятор | 1991 |
|
SU1821353A1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 1994 |
|
RU2079401C1 |
| Устройство управления звеном манипулятора с рекуперацией энергии | 1989 |
|
SU1710334A1 |
| Способ перемещения резонансного манипулятора и устройство для его осуществления | 1988 |
|
SU1607229A1 |
| Манипулятор | 1986 |
|
SU1549741A1 |
| Механическая рука | 1975 |
|
SU568346A3 |

