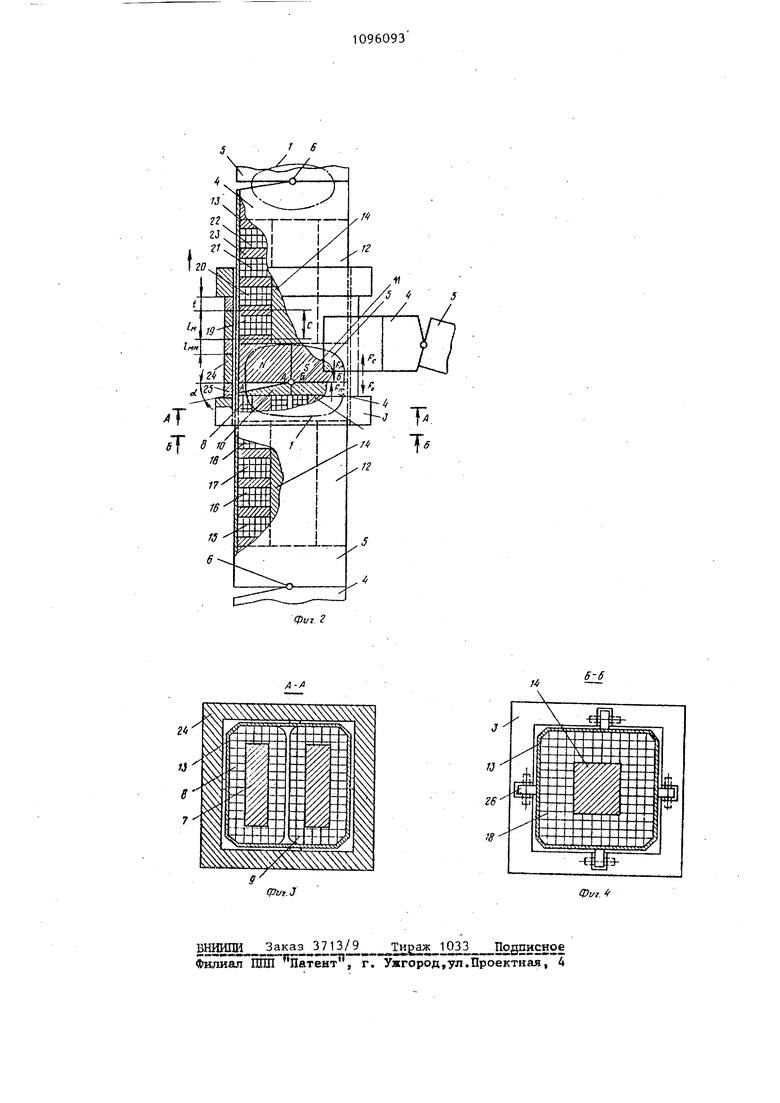
Изобретение относится к робототехнике и может быть использовано для механизации и автоматизации осн ных и вспомогательных операций в ра личных отраслях машино- и приборостроения. Известна механическая рука, соде жащая шарнирно соединенные между со бой звенья, несущие схват, связанны с силовым блоком, при этом силовой блок выполнен в виде последовательн установленных и снабженных приводам модулей, каждый из которых содержит дифференциалы с общим водилом, кине матически связанньпч с приводом С Однако конструкция известного устройства сложна из-за большого количества подвижно установленных элементов, взаимодействующих между собой.. Цель изобретения - упрощение кон струкции. Поставленная цель достигается те что механическая рука, содержащая схват, связанный с последовательно установленными и шарнирно соединенными между собой модулями, снабженными приводами поворота, снабжена приводом продольного перемещения схвата, выполненным в виде линейног .двигателя, статор которого состоит из нескольких частей, размещенных в модулях, а ротор выполнен в виде каретки, охватывающей модули, при этом схват расположен на каретке. Кроме того, привод поворота модуля выполнен в виде электромагнитов, установленных на концах модулей. На фиг. 1 изображена механическая рука; на фиг. 2 - модули, разрез; на фиг. 3 - сечение А-А на фиг. 2; на фиг. 4 - сечение Б-Б на фиг,2. Механическая рука содержит модули 1, установленные последовательно и шарнирно связанные между собой, и схват 2. Схва.т 2 связан с кареткой 3 через последовательно установленные модули 4 и 5, связанные мезкду собой шарнирами 6. Модули 4 и 5 снабжены приводами их поворота, выполненными ввиде электромагнитов, включающих сердечники 7 с размещенными на них обмотками 8 и 9, и постоянных магнитов . На торце каждого сердечника . 7 установлены полюса 10 и 11. Плоскости полюсов 10 и 11 расположены под углом одна к другой равным 180 - d., где et 30-45°. В местах расположени гшоскостей расположены шарниры 6. Электромагниты установлены в модулях 4, а постоянные магниты - в модулях 5.Механическая рука содержит также модули 12, снабженные приводами их поворота друг относительно друга и приводом продольного перемещения схвата. Приводы поворота модулей друг относительно друга выполнены аналогично конструкциям модулей 4 и 5 и размещены на концах модуля 12. Привод продольного перемещения схвата вьтолнен в виде линейного двигателя, статор которого выполнен в виде размещенного в немагнитном корпусе 13 магнитного стержня 14, несущего кольцевые обмотки 15 - 22, разделенные стальными магнитными кольцами 23, а ротор представляет собой каретку 3, выполненную в виде последовательно соединенных, чередующихся и охватывающих корпус 13 магнитных 24 и немагнитных 25 элементов. Каретка смонтирована на корпусе 13 с возможностью перемещения вдоль оси модулей 12 с помощью роликовых опор 26. Для повышения надежности длительной фиксации каретки на корпусе 13.на концах крайних модулей 12 установлены опорные электромагниты 27. Величина t шагового перемещения каретки 3 равна 0,5c,a число фаз определяют из зависимости . -1где IKV длина немагнитного элемента 25; 1 - длина магнитного элемента 24; с - толщина обмотки модуля 12. Механическая рука работает следующим образом. При включении обмотки 19 модуля 12 и обмотки 9 модуля 5 каретка находится в положении, показанном на фиг. 2. В этом случае при соответствующем направлении тока в обмотке 9 модуль 5 фиксируется на плоскости полюса 11 модуля 4, поскольку между разноименными полюсами этих модулей действует сила притяжения. При включении обмотки 19 модуля 12 магнитный элемент 24 каретки 3 фиксируется в положении, близком к положению магнитного равновесия в поле этой обмотки. Для перемещения вверх или вниз каретки 3 переключают в требуемой последовательности в зависимости от направления обмотки модулей 12. Так, например, переключением обмоток 21,
20, 22, 21, 20, 22 обеспечивают перемещение каретки вверх, а переключением обмоток 20, 18, 19, 17, 18, 16, 17, 15 - перемещение каретки вниз. Для осуществления единичного шагового перемещения каретки 3 вверх необходимо, например, включить обмотку 21 и отключить обмотку 19. В результате возникает тяговое усилие, воздействующее на магнитный элемент 24 каретки 3 в направлении уменьшения рабочего воздушного зазора, что обеспечивает перемещение каретки к новому положению магнитного равновесия в поле обмотки 21. Для осуществления поворота модуля 5 относительно модуля 4 обеспечивают перемещение каретки 3 на четыре шага t так, чтобы нижняя его торцовая часть находилась над плоскостью полюса 11 модуля 4, далее изменяют направление тока в обмотке 9 модуля 4 на противоположное, одновременно запитывают обмотку 8 током требуемого направления, затем отключают обмотку 9.При изменении направления тока в обмотке 9 между нижней плоскостью модуля 5 и плоскостью полюса 11 модуля 4 возникает усилие взаимного отталкивания. При этом направление тока во вновь включаемой обмотке 8 должно быть таким, чтобы между нижней плоскостью модуля 5 и плоскостью модуля 4 возникло усилие притяжения. В результате чего модуль 5 и связанные с ним остальные приводные элементы совершают качательное движение на угол о влево относительно вертикальной оси. Далее обмотку 9 отключают, а обмотку 8 оставляют включенной и устройство фиксируется в новом исходном положении. Звенья, соединяющие каретку 3 со схватом 2, могут совершать одновременно два вида движения - качательное и поступательное
Таким образом, предлагаемая конструкция обеспечивает качательное и поступательное перемещение схвата пр минимальном количестве подвижных взаимодействующих между собой элементов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый электродвигатель | 1989 |
|
SU1737654A1 |
| Манипулятор | 1984 |
|
SU1269990A1 |
| Манипулятор | 1986 |
|
SU1323363A1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2001 |
|
RU2184030C1 |
| Артикулятор | 2017 |
|
RU2671029C2 |
| Механическая рука /ее варианты/ | 1985 |
|
SU1278210A1 |
| Промышленный робот | 2015 |
|
RU2654096C2 |
| Рука манипулятора | 1986 |
|
SU1315289A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ШАГОВЫЙ ДВИЖИТЕЛЬ | 2010 |
|
RU2409885C1 |
| Схват манипулятора | 1980 |
|
SU965765A1 |
1. МЕХАНИЧЕСКАЯ РУКА, содержащая схват, связанный с последовательно установленными и шарнирно соединенными между собой модулями, каждый из которых снабжен приводом а X / / поворота, отличающая ся тем, что, с целью расширения ее технологических возможностей,. она снабжена приводом продольного перемещения схвата, вьшолненным в виде линейного двигателя, статор которого состоит из нескольких частей, размещенных в модулях, а ротор выполнен в виде каретки, охватывающей модули, при этом схват расположен на каретке. 2. Рука ПОП.1, отличающаяся тем, что привод поворота модуля выполнен в виде электромагнитов, установленных на концах модулей. (Л с:
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор | 1975 |
|
SU536955A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
