Изобретение относится к робототехнике, в частности к шарнирам исполнительных органов роботов с электромеханическим приводом.
Целью изобретения является упрощение и повышение надежности работы 1иарнира.
На чертеже изображен шарнир, обш,ий вид.
Шарнир манипулятора состоит из двух частей, одна часть 1 выполнена в виде полусферы, на внутренней поверхности которой установлены электромагниты 2 с сердечниками 3, а другая часть 4 выполнена в виде постоянного магнита, установленного с возможностью поворота на верхнем участке 5 свободно врап.1аюпдейся оси 6, выполненной по форме косого кривошипа. Постоянный магнит одним из своих полюсов взаимодействует при работе с электромагнитами 2.
Шарнир работает следующим обрагэм.
В исходном положении постоянный магнит притянут к одному из сердечников 3. Электромагниты 2 обесточены.
Для перемеш.ения, например, части 4 шарнира относительно части 1 на наружный электромагнит 2 подается питаюш.ее напряжение. Вокруг сердечника 3 этого электромагнита возникает магнитное поле, которое взаимодействует с магнитным полем постоянного магнита. За счет притяжения разноименных полюсов, обращенных друг к другу торцов электромагнита и постоян
ного магнита, постоянный магнит,вращаясь вокруг верхнего участка 5 и вместе с осью 6, изменяет свое положение в пространстве и притягивается к сердечнику включенного электромагнита 2.
После отключения питающего напряжения магнитное поле вокруг сердечника 3 упомянутого электромагнита 2 исчезает, однако постоянный магнит находится в своем новом зафиксированном положении за счет притяжения его к сердечнику 3.
Формула изобретения
Шарнир манипулятора, состоящий из двух частей, одна из которых выполнена в виде полусферы с примыкающими к ней электромагнитами с сердечниками, а вторая установлена внутри полусферы с возможностью поворота вокруг ее центра, отличающийся тем, что, с целью упрощения и повышения надежности работы шарнира, он снабжен выполненной по форме косого кривошипа осью, расположенной внутри сферы с возможностью поворота вокруг нижнего участка оси, а вторая часть шарнира выполнена в виде постоянного магнита, установленного с возможностью поворота на верхнем участке оси и взаимодействия одним из своих полюсов с электромагнитами.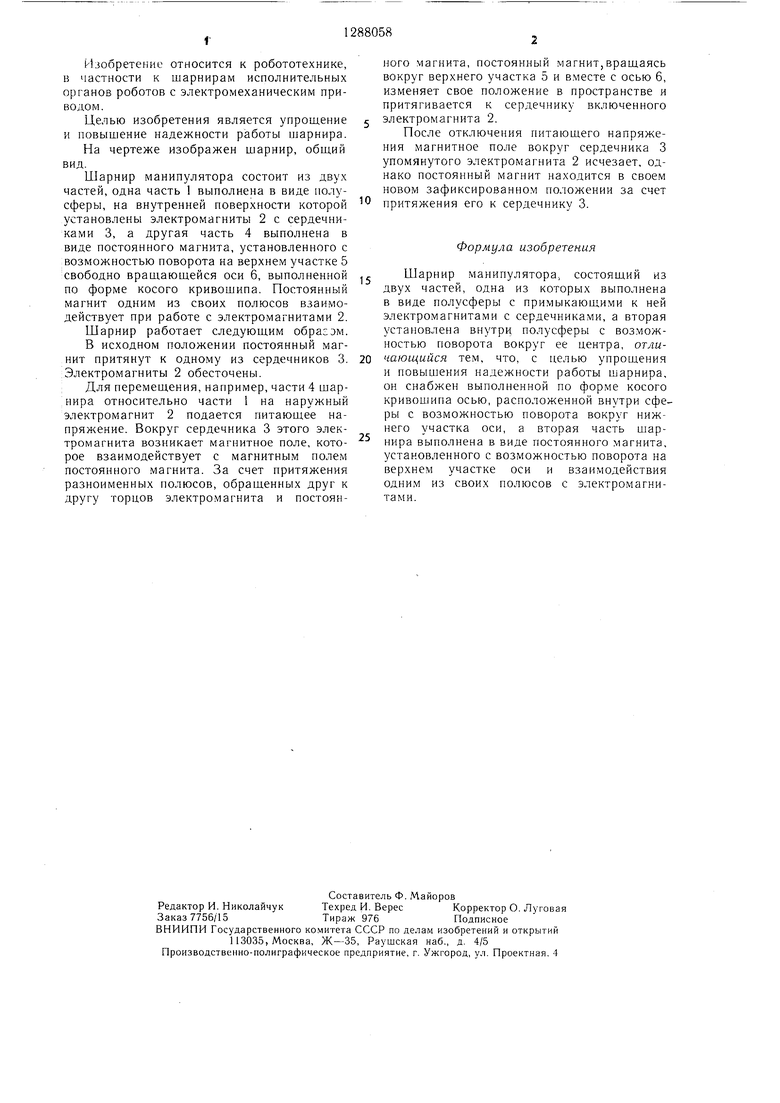
| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнир манипулятора | 1989 |
|
SU1673437A1 |
| Привод поворота кинематических звеньев | 1990 |
|
SU1757865A1 |
| Рука робота | 1987 |
|
SU1458202A1 |
| МАГНИТОГИДРОПУЛЬСОР | 2012 |
|
RU2539225C2 |
| Рука робота | 1985 |
|
SU1284819A1 |
| Механическая рука | 1981 |
|
SU1096093A1 |
| Промышленный робот | 1989 |
|
SU1684022A1 |
| СТАТОР ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА С ПОСТОЯННЫМИ МАГНИТАМИ | 1993 |
|
RU2061990C1 |
| Приводной шарнир манипулятора | 1989 |
|
SU1675079A1 |
| Электромагнитный клапан | 1981 |
|
SU1017870A1 |
Изобретение относится к робототехнике, в частности к шарнирам исполнительных органов роботов с электромеханическим приводом. Целью изобретения является упрощение и повышение надежности шарнира. Шарнир состоит из двух частей, одна из которых 1 выполнена в вкде полусферы с примыкаюш.ими к ней электромагнитами 2 с сердечниками 3, а другая 4 выполнена в виде постоянного магнита, установленного с возможностью поворота на верхнем участке 5 оси 6, выполненной по форме .косого кривошипа. Для взаимного пе- ремепдения частей шарнира на один из электромагнитов 2 подается питающее напряжение, создаюшее магнитное поле, взаимо- действуюплее с полем постоянного магнита за счет притяжения разноименных полюсов электромагнита и постоянного магнита час;ти 4 шарнира, которая изменяет свое положение в пространстве. После от- к„1ючения электромагнита постоянный магнит будет удерживаться за счет его притяжения к сердечнику 3. 1 ил. (/; с 1чЭ 00 00 о СП 00
| Сустав мунипулятора | 1979 |
|
SU837862A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
