Изобретение относится к конвейерному транспорту, в частности к натяжным устройствам конвейеров, используемым для натяжения их гибких тяговых органов.
Цель изобретения - повышение надежности работы устройства путем обеспечения постоянного натяжения гибкого органа при его удлинении.
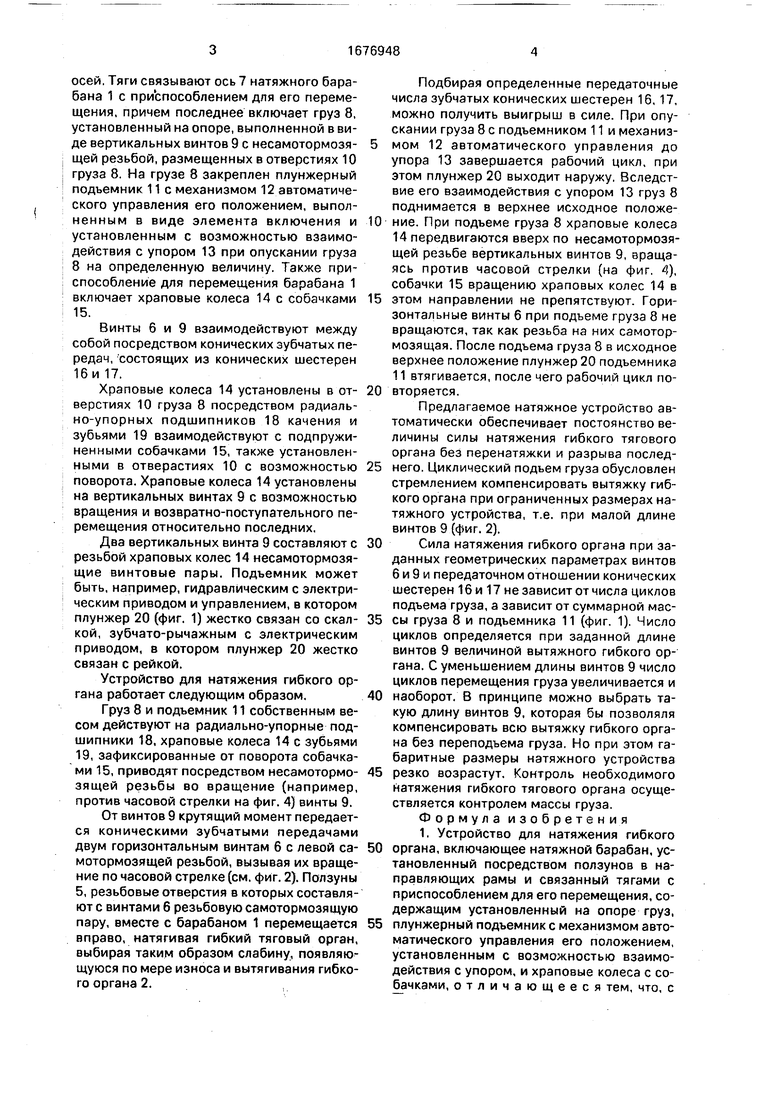
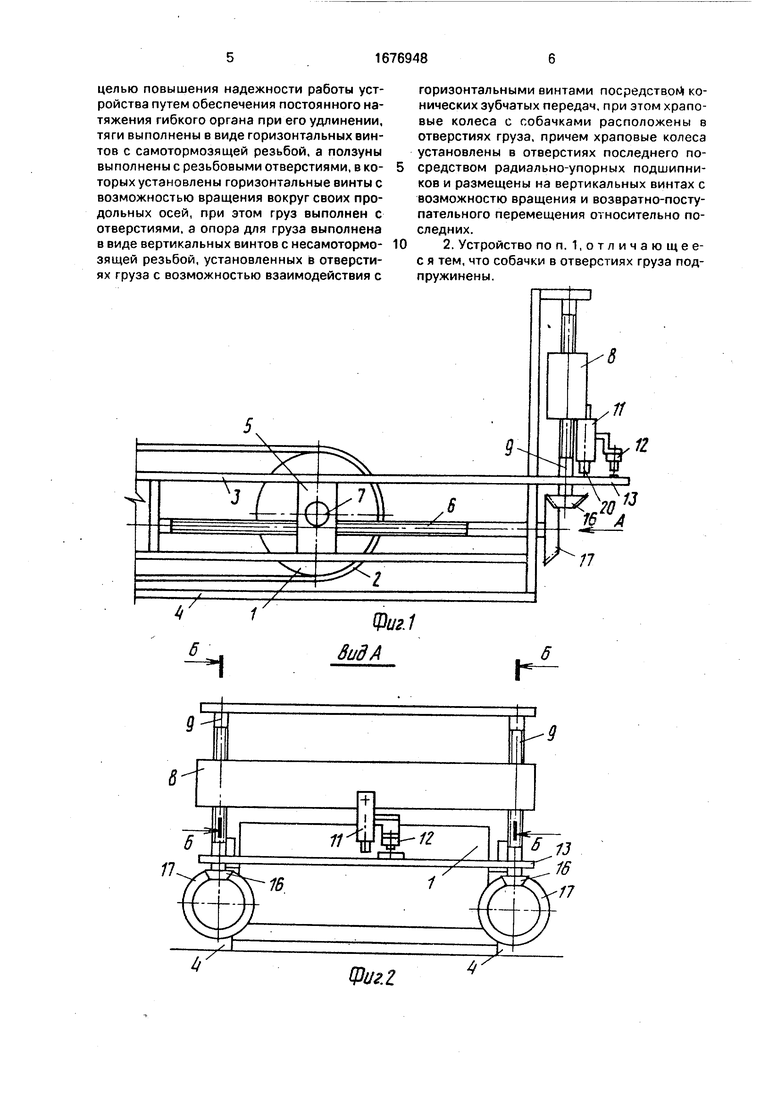
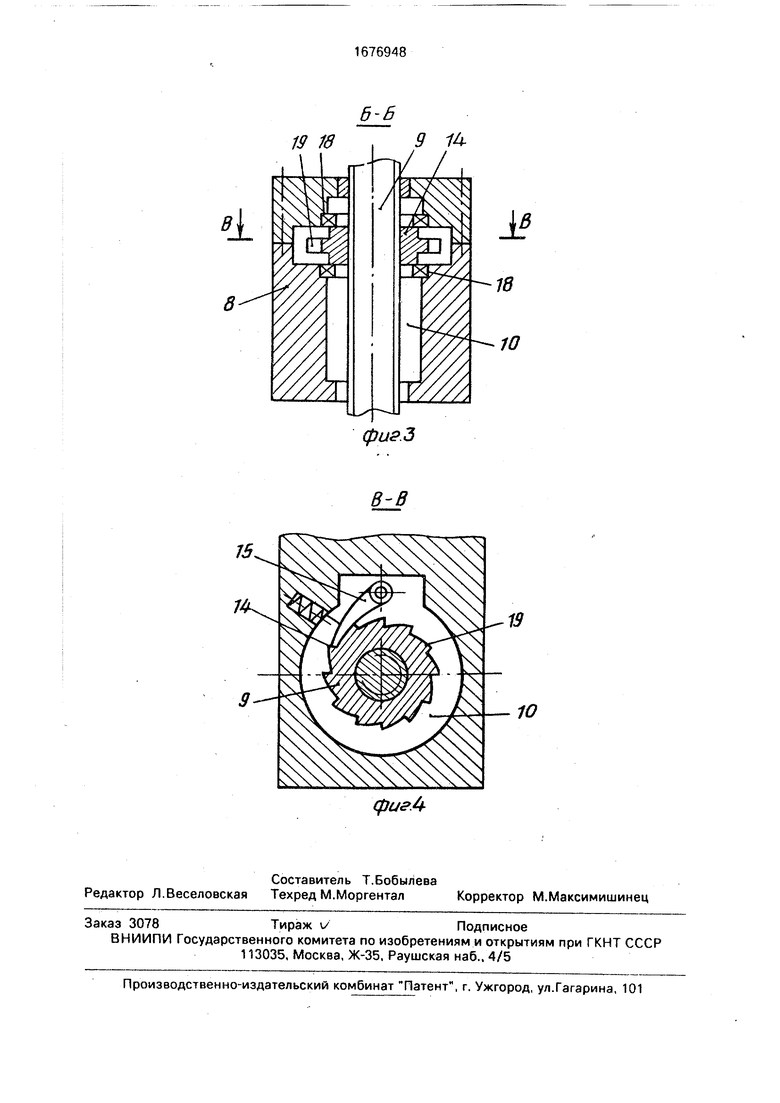
На фиг. 1 изображено устройство для натяжения гибкого органа, вид сбоку; на фиг. 2 - то же, вид А на фиг. 1; на фиг. 3 разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 3.
Устройство для натяжения гибкого органа конвейера включает натяжной барабан 1, который огибает гибкий орган 2 конвейера. Барабан 1 установлен в направляющих 3 рамы 4 посредством ползунов 5, выполненных с резьбовыми отверстиями для размещения в них тяг, выполненных в виде горизонтальных винтов 6 с сэмотормозя- щей резьбой, установленных с возможностью вращения вокруг своих продольных
а
XJ
О Ю N 00
осей. Тяги связывают ось 7 натяжного барабана 1 с приспособлением для его перемещения, причем последнее включает груз 8, установленный на опоре, выполненной в виде вертикальных винтов 9 с несамотормозя- щей резьбой, размещенных в отверстиях 10 груза 8. На грузе 8 закреплен плунжерный подъемник 11 с механизмом 12 автоматического управления его положением, выполненным в виде элемента включения и установленным с возможностью взаимодействия с упором 13 при опускании груза 8 на определенную величину. Также приспособление для перемещения барабана 1 включает храповые колеса 14 с собачками 15.
Винты 6 и 9 взаимодействуют между собой посредством конических зубчатых передач, состоящих из конических шестерен 16и 17.
Храповые колеса 14 установлены в отверстиях 10 груза 8 посредством радиаль- но-упорных подшипников 18 качения и зубьями 19 взаимодействуют с подпружиненными собачками 15, также установленными в отверастиях 10 с возможностью поворота. Храповые колеса 14 установлены на вертикальных винтах 9 с возможностью вращения и возвратно-поступательного перемещения относительно последних,
Два вертикальных винта 9 составляют с резьбой храповых колес 14 несамотормозя- щие винтовые пары. Подъемник может быть, например, гидравлическим с электрическим приводом и управлением, в котором плунжер 20 (фиг. 1) жестко связан со скалкой, зубчато-рычажным с электрическим приводом, в котором плунжер 20 жестко связан с рейкой.
Устройство для натяжения гибкого органа работает следующим образом.
Груз 8 и подъемник 11 собственным весом действуют на радиально-упорные подшипники 18, храповые колеса 14 с зубьями 19, зафиксированные от поворота собачками 15, приводят посредством несамотормо- зящей резьбы во вращение (например, против часовой стрелки на фиг. 4) винты 9. От винтов 9 крутящий момент передается коническими зубчатыми передачами двум горизонтальным винтам 6 с левой самотормозящей резьбой, вызывая их вращение по часовой стрелке (см. фиг. 2). Ползуны 5, резьбовые отверстия в которых составляют с винтами б резьбовую самотормозящую пару, вместе с барабаном 1 перемещается вправо, натягивая гибкий тяговый орган, выбирая таким образом слабину, появляющуюся по мере износа и вытягивания гибкого органа 2.
Подбирая определенные передаточные числа зубчатых конических шестерен 16, 17, можно получить выигрыш в силе. При опускании груза 8 с подъемником 11 и механизмом 12 автоматического управления до упора 13 завершается рабочий цикл, при этом плунжер 20 выходит наружу. Вследствие его взаимодействия с упором 13 груз 8 поднимается в верхнее исходное положе0 ние. При подъеме груза 8 храповые колеса 14 передвигаются вверх по несамотормозя- щей резьбе вертикальных винтов 9, вращаясь против часовой стрелки (на фиг. 4), собачки 15 вращению храповых колес 14 в
5 этом направлении не препятствуют. Горизонтальные винты 6 при подъеме груза 8 не вращаются, так как резьба на них самотормозящая. После подъема груза 8 в исходное верхнее положение плунжер 20 подъемника 11 втягивается, после чего рабочий цикл по0 вторяется.
Предлагаемое натяжное устройство автоматически обеспечивает постоянство величины силы натяжения гибкого тягового органа без перенатяжки и разрыва послед5 него. Циклический подъем груза обусловлен стремлением компенсировать вытяжку гибкого органа при ограниченных размерах натяжного устройства, т.е. при малой длине винтов 9 (фиг. 2).
0 Сила натяжения гибкого органа при заданных геометрических параметрах винтов 6 и 9 и передаточном отношении конических шестерен 16 и 17 не зависит от числа циклов подъема груза, а зависит от суммарной мас5 сы груза 8 и подъемника 11 (фиг. 1). Число циклов определяется при заданной длине винтов 9 величиной вытяжного гибкого органа. С уменьшением длины винтов 9 число циклов перемещения груза увеличивается и
0 наоборот. В принципе можно выбрать такую длину винтов 9, которая бы позволяля компенсировать всю вытяжку гибкого органа без переподъема груза. Но при этом габаритные размеры натяжного устройства
5 резко возрастут. Контроль необходимого натяжения гибкого тягового органа осуществляется контролем массы груза. Формула изобретения 1. Устройство для натяжения гибкого
0 органа, включающее натяжной барабан, установленный посредством ползунов в направляющих рамы и связанный тягами с приспособлением для его перемещения, содержащим установленный на опоре груз,
5 плунжерный подъемник с механизмом автоматического управления его положением, установленным с возможностью взаимодействия с упором, и храповые колеса с собачками, отличающееся тем, что, с
целью повышения надежности работы устройства путем обеспечения постоянного натяжения гибкого органа при его удлинении, тяги выполнены в виде горизонтальных винтов с самотормозящей резьбой, а ползуны выполнены с резьбовыми отверстиями, в которых установлены горизонтальные винты с возможностью вращения вокруг своих продольных осей, при этом груз выполнен с отверстиями, а опора для груза выполнена в виде вертикальных винтов с несамотормо- зящей резьбой, установленных в отверстиях груза с возможностью взаимодействия с
0
горизонтальными винтами посредством конических зубчатых передач, при этом храповые колеса с собачками расположены в отверстиях груза, причем храповые колеса установлены в отверстиях последнего посредством радиально-упорных подшипников и размещены на вертикальных винтах с возможностю вращения и возвратно-поступательного перемещения относительно последних.
2. Устройство по п. 1,отличающее- с я тем, что собачки в отверстиях груза подпружинены.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для натяжения гибкого тягового органа | 1985 |
|
SU1257033A1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2013 |
|
RU2522729C1 |
| Устройство для натяжения тягового органа | 1984 |
|
SU1216090A1 |
| Подъемник | 1978 |
|
SU846499A1 |
| Устройство для подъема и уравновешивания груза | 1988 |
|
SU1609743A1 |
| Натяжное устройство тягового органа | 1972 |
|
SU506548A1 |
| МЕХАНИЧЕСКАЯ ЛЕБЕДКА | 1992 |
|
RU2047553C1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ БЕТОННЫХ ИЗДЕЛИЙ | 2009 |
|
RU2405672C1 |
| КОНЦЕВОЙ ЭФФЕКТОР С ШАРНИРНЫМ УЗЛОМ И ПРИВОД ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2016 |
|
RU2636853C2 |
| Привод скважинного штангового насоса | 2024 |
|
RU2833741C1 |
Изобретение относится к конвейерному транспорту. Цель - повышение надежности работы устр-ва путем обеспечения постоянного натяжения гибкого органа при его удлинении. Устр-во включает натяжной барабан, который огибает гибкий орган 2 конвейера. Барабан 1 установлен в направляющих 3 рамы 4 посредством ползунов 5. Последние выполнены с резьбовыми отверстиями для размещения в них тяг, выполненных в виде горизонтальных винтов 6 с самотормозящей резьбой. Тяги связывают ось 7 барабана 1 с приспособлением для его перемещения, которое включает груз 8, установленный на опоре в виде вертикальных винтов 9 с несамотормозящей резьбой, размещенных в отверстиях 10 груза 8. На грузе 8 закреплен плунжерный подъемник 11с механизмом 12. В отверстиях груза 8 посредством радиально-упорных подшипников качения установлены храповые колеса с собачками. Груз и подъемник собственным весом действует на радиально-упорные подшипники. Храповые колеса с зубьями, зафиксированные от поворота собачками, приводят посредством несамотормозящей резьбы во вращение винты 9. От последних крутящий момент передается коническими зубчатыми передачами двум горизонтальным винтам 6, вызывая их вращение. Ползун 5 вместе с барабаном 1 перемещаются, натягивая гибкий тяговый орган. 1 з.п.ф-лы, 4 ил. (Л С
| Натяжное устройство конвейера | 1977 |
|
SU648476A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для натяжения гибкого тягового органа | 1985 |
|
SU1257033A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
