рие.1
Изобретение относится к автоматизации конвейерного транспорта и может быть использовано для контроля поперечных колебаний тяговых органов конвейеров, имеющих лентуfоснащенную грузонесущими элементами в форме ковшей, скребков, планок, предназначенных для перемещения сыпучих материалов по вертикали.
Цель изобретения - повышено точности контроля.
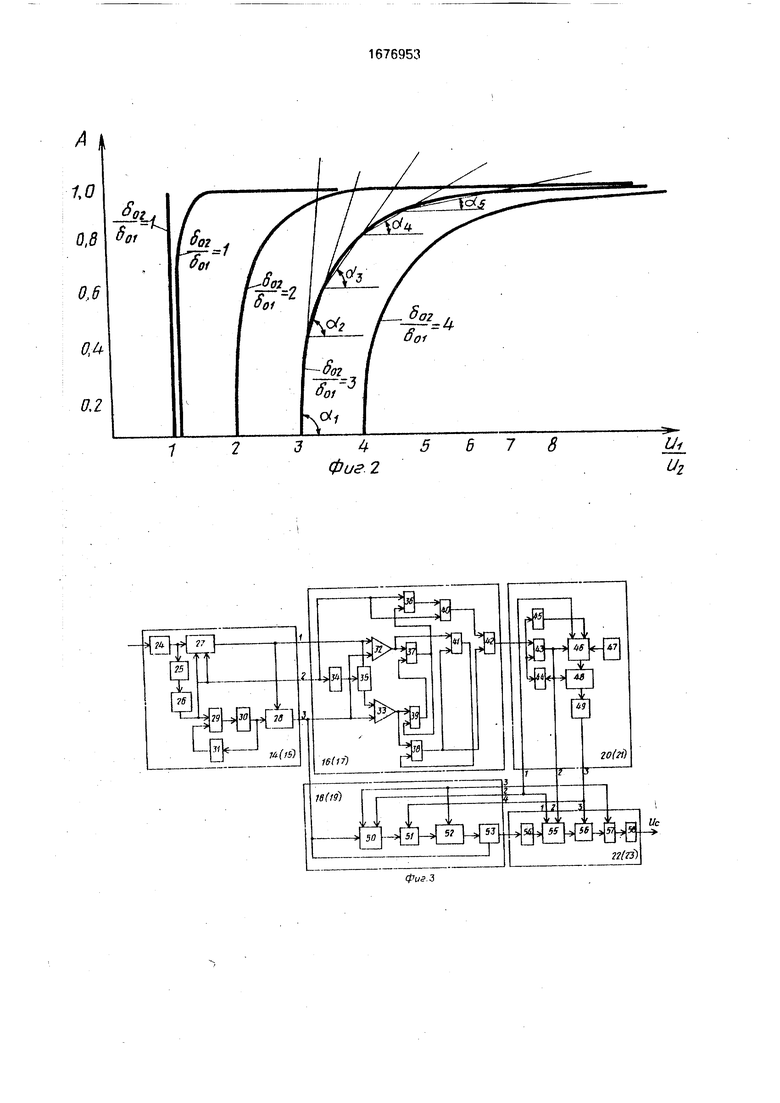
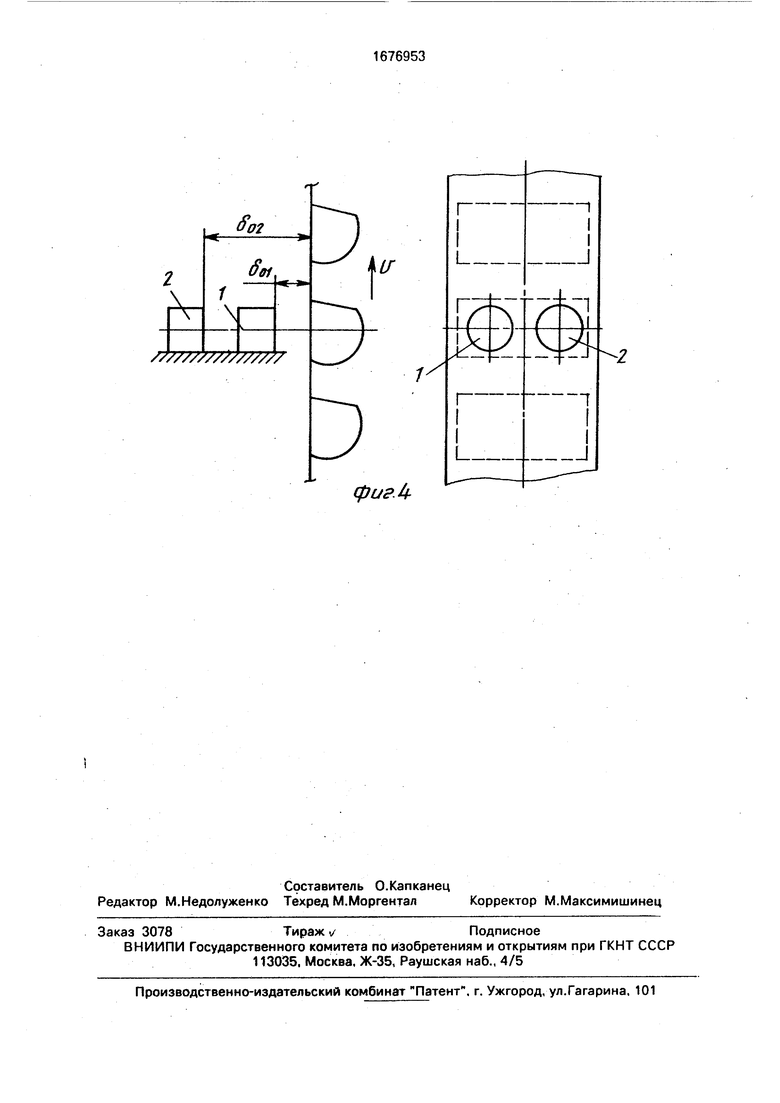
На фиг, 1 изображена блок-схема устройства контроля колебаний вертикального ленточного конвейера; на фиг. 2 - статическая характеристика характера зависимости амплитуды колебаний ленты от отношения сигналов, формируемых блоком определения текущей велмчинь периода колебаний ленты; на фиг. 2 - функциональная схема блока определения текущей величины периода колебаний ленты; нз фиг. 4 - расположение индукционных датчиков относительно ленты конвейера.
Устройство контроля колебаний ленты вертикального ленточного конвейера содержит два идентичных контролирующих канала, в которых имеются индукционные датчики 1, 2гсоединенные через усилители 3, 4 с блоками 5, 6 вычисления. Выходы блоков 5 и 6, являющиеся выходами обоих каналов, соединены соответствующими входами блока 7 деления, выход которого через последовательно соединенные фильтр 8 нижних частот, блок 9 нелинейных преобразований и блок 10 масштабирования подключен к измерительнмоу прибору 11 и компаратору 12, выход которого соединен с индикатором 13. Блок 5 (6) вычисления содержит блок 14 (15) определения амплитуды сигнала, два выхода которого подключены к входам блока 16 (17) определения экстремумов, а третий с блоком 16 (17) и блоком 18 (19) центрирования, выход блока 16 (17) подключен ко входу блока 20 (21) вычисления периода колебаний, выходы которого соединены с входами блоков 18 (19) центрирования и блока 22 (23) интегрирования, выход которого является выходом блока 5 (6).
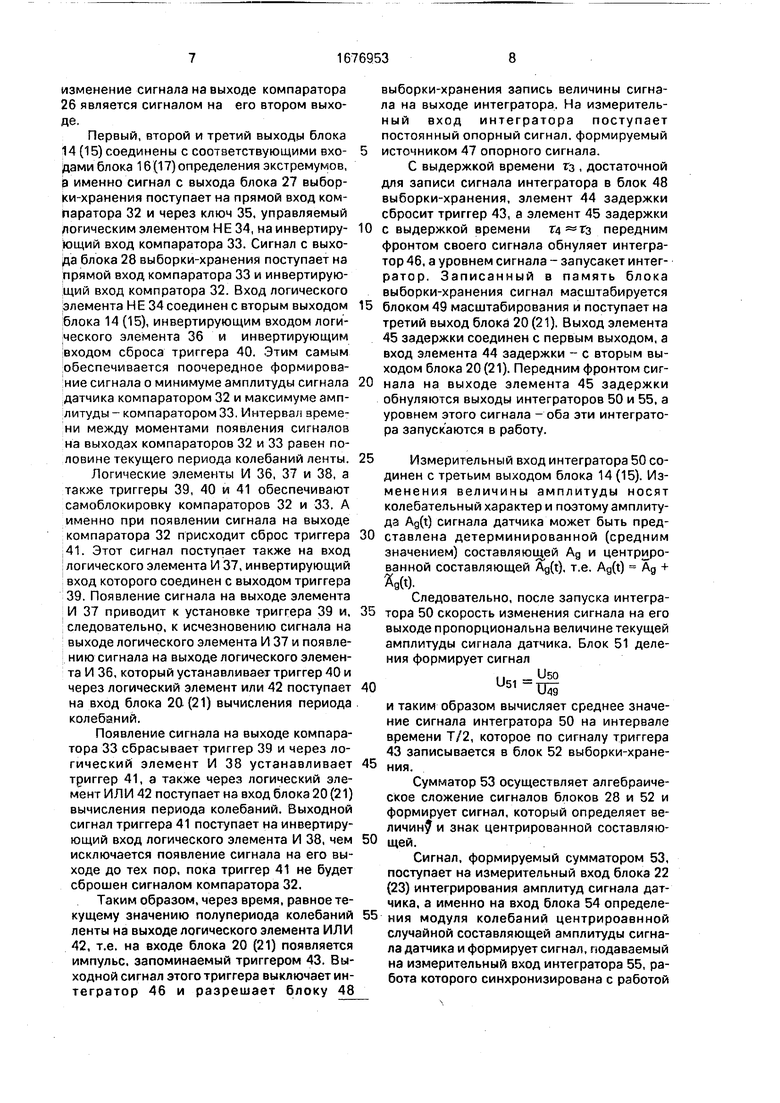
Блок 14 (15) определения амплитуды сигнала состоит из блока 24 определения модуля сигнала, блока 25 дифференцирования, компаратора 26, блоков 27 и 28 выборки-хранения, триггера 29 и элементов 30 и 31 задержки.
Блок 16 (17) определения экстремумов содержит компараторы 32 и 33, логический элемент НЕ 34, ключ 35, логические элементы И 36, 37 и 38, триггеры 39, 40 и 41 и логический элемент ИЛИ 42,
Блок 20 (21) вычисления периода колебаний содержит триггер 43, элементы 44 и 45 задержки, интегратор 46, источник 47 опорного сигнала, блок 48 выборки-хранения и блок 49 масштабирования.
Блок 18 (19) центрирования содержит интегратор 50, блок 51 деления, блок 52 выборки-хранения и сумматора 53.
Блок 22 (23) интегрирования амплитуд
сигнала датчика содержит блок 54 определения модуля сигнала, интегратор 55, блок 56 деления, блок 57 выборки-хранения и блок 58 масштабирования.
Устройство работает следующим образом.
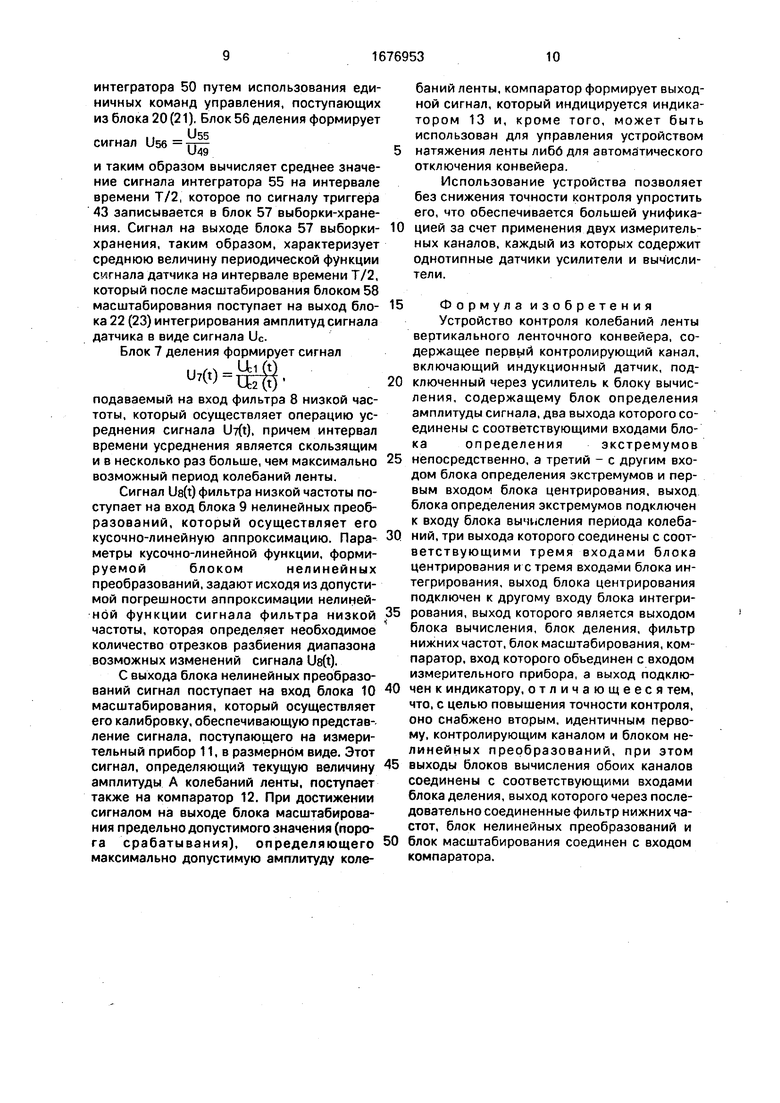
При работе конвейера индукционные датчики 1 и 2 в результате взаимодействия с грузонесущими элементами генерируют пульсирующие аналоговые сигналы, амплитуды которых согласованно, в случае наличия колебаний ленты изменяются во времени. Согласованное изменение амплитуд обеспечивается размещением датчиков в одной горизонтальной плоскости, причем датчики установлены с разными начальными смещениями относительно неподвижной ленты в ортогональной рабочему движению плоскости, а именно (5о2 5си. Сигналы датчиков после усиления их по величине и мощности усилителями 3 и 4
поступают соответственно в блоки 5 и 6, каждый из которых формирует на выходе соответственно сигнал UC1 и UC2. пропорциональный среднему значению периодической функции сигнала датчика,
характеризующего колебания ленты на интервале времени, равном полупериоду ее поперечных колебаний.
Сигналы UC1 и Uc2 формируются следующим образом.
0 Лента конвейера, натянутая между барабанами, обладает колебательными свойствами в направлении, ортогональном ее рабочему перемещению. Амплитуда этих поперечных колебаний определяется выра5 жением:
0
ехр
fUd }
1Ж.1
ехр
Осту
2К
+ 1
(1)
где д0 - начальное смещение неподвижной ленты в ортогональной рабочему движению плоскости в некоторой выбранной системе отсчета;
Uc - среднее значение периодической функции сигнала датчика на интервале времени, равном полупериоду поперечных колебаний ленты;
Т - период поперечных колебаний ленты;
К - коэффициент пропорциональности, определяемый конструктивными параметрами датчика и грузонесущего элемента, причем
Uee«,nЈ±A.
(2)
Измерение амплитуды А требует информации о величине периода Т поперечных колебаний. Однако этой необходимости использования информации о величине Т можно избежать, если использовать не один, а два датчика, установленных в одной горизонтальной плоскости с различными величинами начального смещения (5oi и 6о2 соответственно.
В соответствии с (2) среднее значение периодической функции сигнала датчика на интервале времени, равном полупериоду поперечных колебаний ленты для каждого из этих двух датчиков, составляет величину
и 2К., dpi +Л
Uc1 -тln
11 „ - 2К 1„ Uc2-Tln3 A
Из (3) и (4) можно записать соответственно
т 2К ,n 3pi+A
I 1
UC1 002 -А
т 2К ,do2+A
и, следовательно,
UЈi Uc2
In
In
J02 + A (fo -A
Й02+А
00
5oi - A
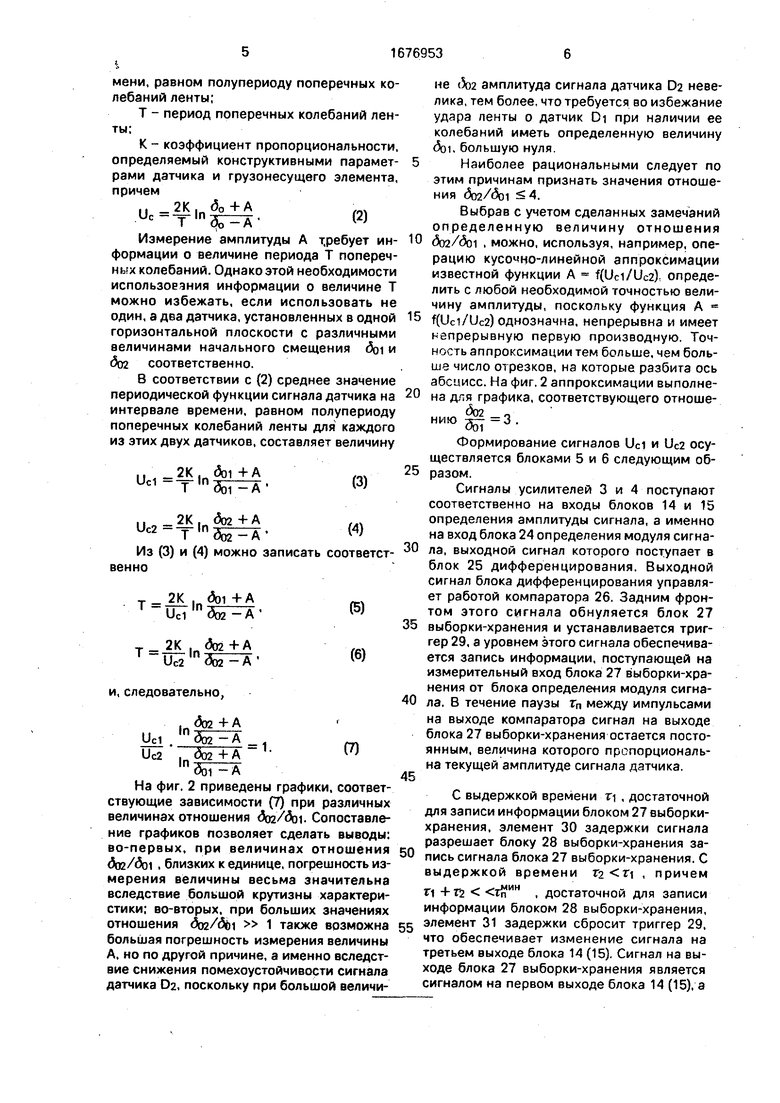
На фиг. 2 приведены графики, соответствующие зависимости (7) при различных величинах отношения . Сопоставление графиков позволяет сделать выводы: во-первых, при величинах отношения , близких к единице, погрешность измерения величины весьма значительна вследствие большой крутизны характеристики; во-вторых, при больших значениях отношения 1 также возможна большая погрешность измерения величины А, но по другой причине, а именно вследствие снижения помехоустойчивости сигнала датчика D2, поскольку при большой величи
не 5о2 амплитуда сигнала датчика D2 невелика, тем более, что требуется во избежание удара ленты о датчик DI при наличии ее колебаний иметь определенную величину 5oi, большую нуля.
5Наиболее рациональными следует по
этим причинам признать значения отношения 4.
Выбрав с учетом сделанных замечаний определенную величину отношения
Ю &) . можно, используя, например, операцию кусо«но-линейной аппроксимации известной функции А f(Uci/UC2) определить с любой необходимой точностью величину амплитуды, поскольку функция А
15 f(Uci/UC2) однозначна, непрерывна и имеет непрерывную первую производную. Точность аппроксимации тем больше, чем больше число отрезков, на которые разбита ось абсцисс. На фиг. 2 аппроксимации выполне20 на для графика, соответствующего отношению -Э.
Формирование сигналов UC1 и UC2 осуществляется блоками 5 и 6 следующим об25 разом.
Сигналы усилителей 3 и 4 поступают соответственно на входы блоков 14 и 15 определения амплитуды сигнала, а именно на вход блока 24 определения модуля сигна30 ла, выходной сигнал которого поступает в блок 25 дифференцирования. Выходной сигнал блока дифференцирования управляет работой компаратора 26. Задним фронтом этого сигнала обнуляется блок 27
35 выборки-хранения и устанавливается триггер 29, а уровнем этого сигнала обеспечивается запись информации, поступающей на измерительный вход блока 27 выборки-хранения от блока определения модуля сигна40 ла. В течение паузы гп между импульсами на выходе компаратора сигнал на выходе блока 27 выборки-хранения остается постоянным, величина которого пропорциональна текущей амплитуде сигнала датчика.
45
С выдержкой времени т , достаточной для записи информации блоком 27 выборки- хранения, элемент 30 задержки сигнала разрешает блоку 28 выборки-хранения за- 50 пись сигнала блока 27 выборки-хранения. С выдержкой времени , причем
П + Т2 т#ин , достаточной для записи информации блоком 28 выборки-хранения, gg элемент 31 задержки сбросит триггер 29, что обеспечивает изменение сигнала на третьем выходе блока 14 (15). Сигнал на выходе блока 27 выборки-хранения является сигналом на первом выходе блока 14 (15), а
изменение сигнала на выходе компаратора 26 является сигналом на его втором выходе.
Первый, второй и третий выходы блока 14 (15) соединены с соответствующими входами блока 16 (17) определения экстремумов, а именно сигнал с выхода блока 27 выборки-хранения поступает на прямой вход компаратора 32 и через ключ 35, управляемый логическим элементом НЕ 34, на инвертирующий вход компаратора 33. Сигнал с выхода блока 28 выборки-хранения поступает на прямой вход компаратора 33 и инвертирующий вход компратора 32. Вход логического элемента НЕ 34 соединен с вторым выходом блока 14 (15), инвертирующим входом логического элемента 36 и инвертирующим входом сброса триггера 40. Этим самым обеспечивается поочередное формирование сигнала о минимуме амплитуды сигнала датчика компаратором 32 и максимуме амплитуды - компаратором 33. Интервал времени между моментами появления сигналов на выходах компараторов 32 и 33 равен половине текущего периода колебаний ленты. Логические элементы И 36, 37 и 38, а также триггеры 39, 40 и 41 обеспечивают самоблокировку компараторов 32 и 33. А именно при появлении сигнала на выходе компаратора 32 присходит сброс триггера 41. Этот сигнал поступает также на вход логического элемента И 37, инвертирующий вход которого соединен с выходом триггера 39. Появление сигнала на выходе элемента И 37 приводит к установке триггера 39 и, следовательно, к исчезновению сигнала на выходе логического элемента И 37 и появлению сигнала на выходе логического элемента И 36, который устанавливает триггер 40 и через логический элемент или 42 поступает на вход блока 20(21) вычисления периода колебаний.
Появление сигнала на выходе компаратора 33 сбрасывает триггер 39 и через логический элемент И 38 устанавливает триггер 41, а также через логический элемент ИЛИ 42 поступает на вход блока 20 (21) вычисления периода колебаний. Выходной сигнал триггера 41 поступает на инвертирующий вход логического элемента И 38, чем исключается появление сигнала на его выходе до тех пор, пока триггер 41 не будет сброшен сигналом компаратора 32.
Таким образом, через время, равное текущему значению полупериода колебаний ленты на выходе логического элемента ИЛИ 42, т.е. на входе блока 20 (21) появляется импульс, запоминаемый триггером 43. Выходной сигнал этого триггера выключает интегратор 46 и разрешает блоку 48
выборки-хранения запись величины сигнала на выходе интегратора. На измерительный вход интегратора поступает постоянный опорный сигнал, формируемый
источником 47 опорного сигнала.
С выдержкой времени Тз , достаточной для записи сигнала интегратора в блок 48 выборки-хранения, элемент 44 задержки сбросит триггер 43, а элемент 45 задержки
0 с выдержкой времени передним фронтом своего сигнала обнуляет интегратор 46, а уровнем сигнала - запусакет интег- ратор. Записанный в память блока выборки-хранения сигнал масштабируется
5 блоком 49 масштабирования и поступает на третий выход блока 20 (21). Выход элемента 45 задержки соединен с первым выходом, а вход элемента 44 задержки - с вторым выходом блока 20 (21). Передним фронтом сиг0 нала на выходе элемента 45 задержки обнуляются выходы интеграторов 50 и 55, а уровнем этого сигнала - оба эти интегратора запускаются в работу.
5 Измерительный вход интегратора 50 со- динен с третьим выходом блока 14 (15). Изменения величины амплитуды носят колебательный характер и поэтому амплитуда Ag(t) сигнала датчика может быть пред0 ставлена детерминированной (средним значением) составляющей Ад и центрированной составляющей Ag(t). т.е. Ag(t) Ад +
КдЮ.
Следовательно, после запуска интегра- 5 тора 50 скорость изменения сигнала на его выходе пропорциональна величине текущей амплитуды сигнала датчика. Блок 51 деления формирует сигнал
i
0U51 U
и таким образом вычисляет среднее значение сигнала интегратора 50 на интервале времени Т/2, которое по сигналу триггера 43 записывается в блок 52 выборки-хране5 ния.
Сумматор 53 осуществляет алгебраическое сложение сигналов блоков 28 и 52 и формирует сигнал, который определяет величину и знак центрированной составляю0 щей.
Сигнал, формируемый сумматором 53, поступает на измерительный вход блока 22 (23) интегрирования амплитуд сигнала датчика, а именно на вход блока 54 определе5 ния модуля колебаний центрироавнной случайной составляющей амплитуды сигнала датчика и формирует сигнал, подаваемый на измерительный вход интегратора 55, работа которого синхронизирована с работой
интегратора 50 путем использования единичных команд управления, поступающих из блока 20(21). Блок 56 деления формирует
U55
сигнал Use
U49
и таким образом вычисляет среднее значение сигнала интегратора 55 на интервале времени Т/2, которое по сигналу триггера 43 записывается в блок 57 выборки-хранения. Сигнал на выходе блока 57 выборки- хранения, таким образом, характеризует среднюю величину периодической функции сигнала датчика на интервале времени Т/2, который после масштабирования блоком 58 масштабирования поступает на выход блока 22 (23)интегрирования амплитуд сигнала датчика в виде сигнала Uc.
Блок 7 деления формирует сигнал
м м - Ц1 ft)
и)-ш|5
подаваемый на вход фильтра 8 низкой частоты, который осуществляет операцию усреднения сигнала U(t), причем интервал времени усреднения является скользящим и в несколько раз больше, чем максимально возможный период колебаний ленты.
Сигнал Us(t) фильтра низкой частоты поступает на вход блока 9 нелинейных преобразований, который осуществляет его кусочно-линейную аппроксимацию. Параметры кусочно-линейной функции, формируемойблокомнелинейныхпреобразований, задают исходя из допустимой погрешности аппроксимации нелинейной функции сигнала фильтра низкой частоты, которая определяет необходимое количество отрезков разбиения диапазона возможных изменений сигнала Us(t).
С выхода блока нелинейных преобразований сигнал поступает на вход блока 10 масштабирования, который осуществляет его калибровку, обеспечивающую представление сигнала, поступающего на измерительный прибор 11, в размерном виде. Этот сигнал, определяющий текущую величину амплитуды А колебаний ленты, поступает также на компаратор 12. При достижении сигналом на выходе блока масштабирования предельно допустимого значения (порога срабатывания), определяющего максимально допустимую амплитуду колебаний ленты, компаратор формирует выходной сигнал, который индицируется индикатором 13 и, кроме того, может быть использован для управления устройством
5 натяжения ленты либб для автоматического отключения конвейера.
Использование устройства позволяет без снижения точности контроля упростить его, что обеспечивается большей унифика0 цией за счет применения двух измерительных каналов, каждый из которых содержит однотипные датчики усилители и вычислители.
5 Формула изобретения
Устройство контроля колебаний ленты вертикального ленточного конвейера, содержащее первый контролирующий канал, включающий индукционный датчик, под0 ключенный через усилитель к блоку вычисления, содержащему блок определения амплитуды сигнала, два выхода которого соединены с соответствующими входами блокаопределенияэкстремумов
5 непосредственно, а третий - с другим входом блока определения экстремумов и первым входом блока центрирования, выход блока определения экстремумов подключен к входу блока вычисления периода колеба0 ний, три выхода которого соединены с соответствующими тремя входами блока центрирования и с тремя входами блока интегрирования, выход блока центрирования подключен к другому входу блока интегри5 рования, выход которого является выходом
блока вычисления, блок деления, фильтр нижних частот, блок масштабирования, компаратор, вход которого объединен с входом измерительного прибора, а выход подклю0 чен к индикатору, отличающееся тем, что, с целью повышения точности контроля, оно снабжено вторым, идентичным первому, контролирующим каналом и блоком нелинейных преобразований, при этом
5 выходы блоков вычисления обоих каналов соединены с соответствующими входами блока деления, выход которого через последовательно соединенные фильтр нижних частот, блок нелинейных преобразований и
0 блок масштабирования соединен с входом компаратора.
0,2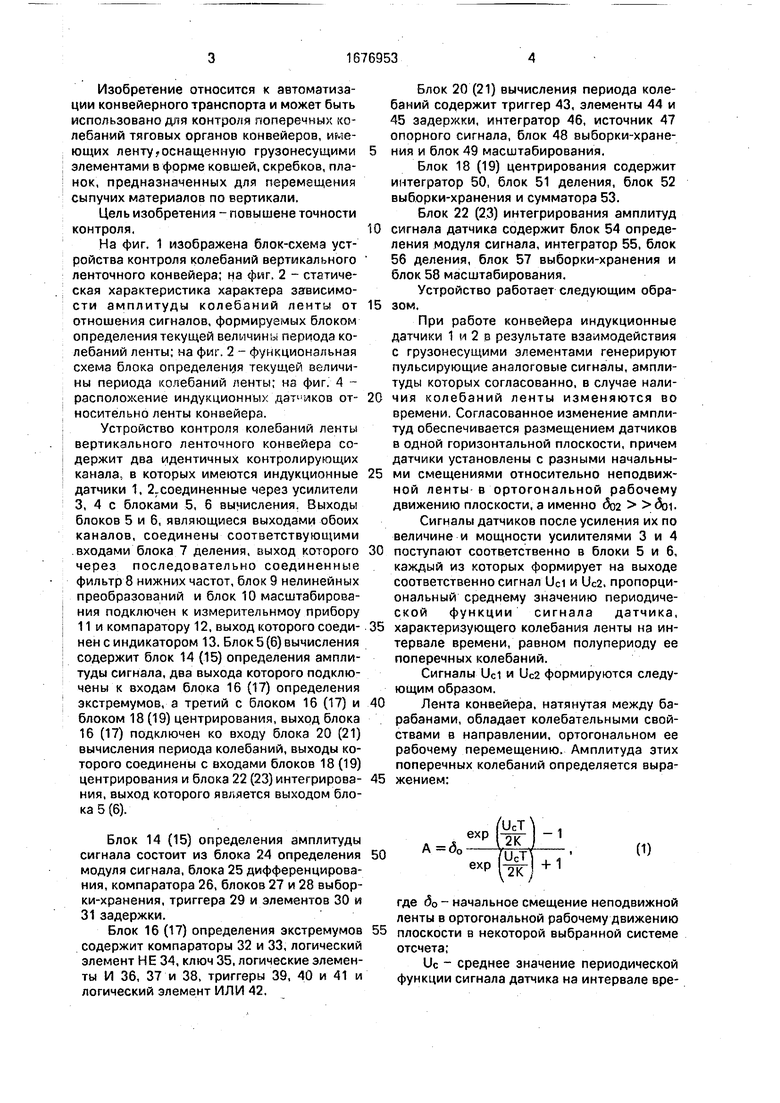
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля работоспособности ленточного конвейера и устройство для его осуществления | 1988 |
|
SU1555240A1 |
| Устройство контроля скорости ленты конвейера | 1989 |
|
SU1752687A1 |
| Устройство для автоматического контроля консистенции бетонной смеси в процессе ее приготовления | 1991 |
|
SU1795942A3 |
| Устройство контроля грузонесущей способности конвейера | 1989 |
|
SU1752688A1 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ КВАДРАТНОГО КОРНЯ | 1993 |
|
RU2057366C1 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ КВАДРАТНОГО КОРНЯ ИЗ СУММЫ КВАДРАТОВ ДВУХ ВЕЛИЧИН | 1992 |
|
RU2037201C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА В ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ ПО МЕЖЦИКЛОВОЙ НЕСТАБИЛЬНОСТИ ПРОЦЕССА СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2029124C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИНДУКЦИИ ПЕРЕМЕННОГО МАГНИТНОГО ПОЛЯ | 1995 |
|
RU2108593C1 |
| Устройство для измерения давления | 1988 |
|
SU1569621A1 |
| Устройство для настройки систем автоматического регулирования | 1978 |
|
SU951242A1 |
Изобретение относится к автоматизации конвейерного транспорта. Цель изобретения - повышение точности контроля. Устройство контроля содержит два идентичных контролирующих канала, в которых г 1манал Лнана/ иоий АЧаея. чх г формируются сигналы среднего значения периодической фукнции сигнала индукционных датчиков 1, 2 на интервале времени, рзаном полупериоду поперечных колебаний ленты конвейера. Затем блок 7 деления осуществляет деление этих двух сигналов. Полученный сигнал с блока 7 деления ус - редняется в фильтре 8 нижних частот. Затем в блоке 9 нелинейных преобразователей осуществляется кусочно-линейная аппроксимация полученного от блока 8 сигнала. Полученный сигнал масштабируется в блоке 10. Сигнал, определяющий текущую величину амплитуды колебаний ленты конвейера, с выхода блока 10 поступает в компаратор 12, который формирует выходной сигнал, сигнализирующий о состоянии грузонесу- щих элементов на ленте конвейера. Сигнал индицируется индикатором и м.б. использован для управления устр-вом натяжения ленты либо для автоматического отключения конвейера. 4 ил. Til Cf -см«нН V ё о xj О чэ СП 00
фиг.Ь
| Способ контроля скорости конвейерной ленты | 1980 |
|
SU977320A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Способ контроля работоспособности ленточного конвейера и устройство для его осуществления | 1988 |
|
SU1555240A1 |
| кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
