Изобретение относится к текстильному машиностроению, в частности к конструкции зевообразующего устройства ткацкого станка с волнообразно подвижным зевом.
Цель изобретения - расширение ассортиментных возможностей и повышение скоростных возможностей.
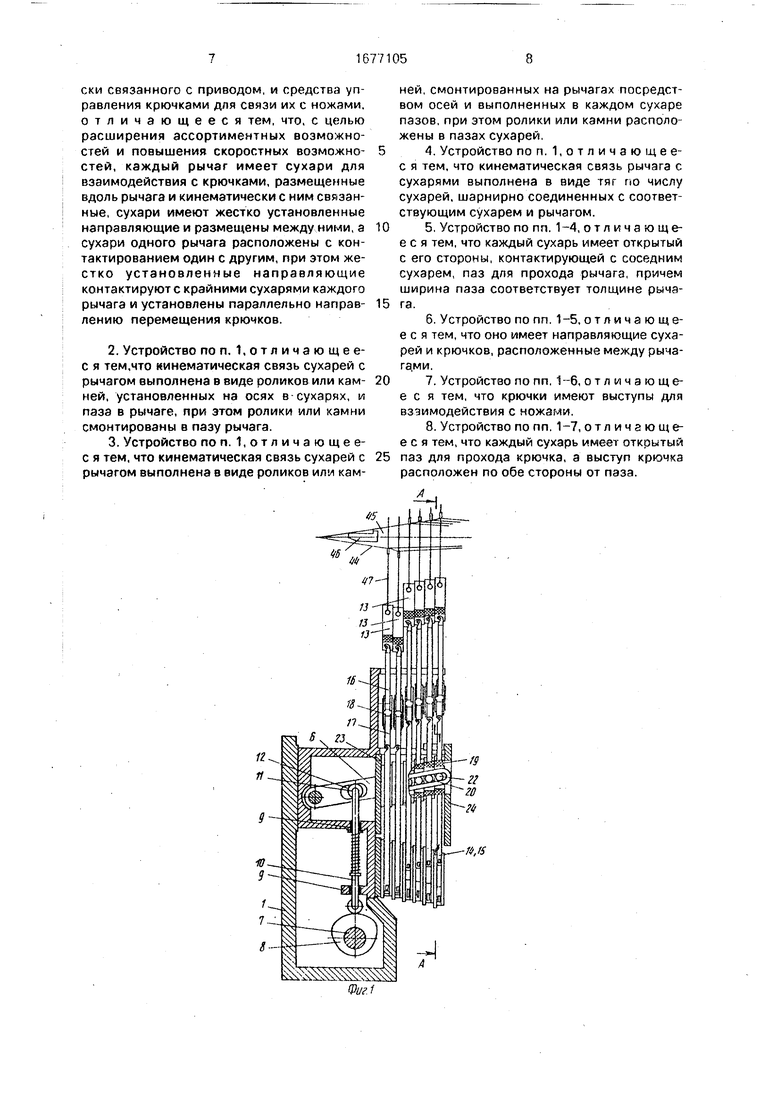
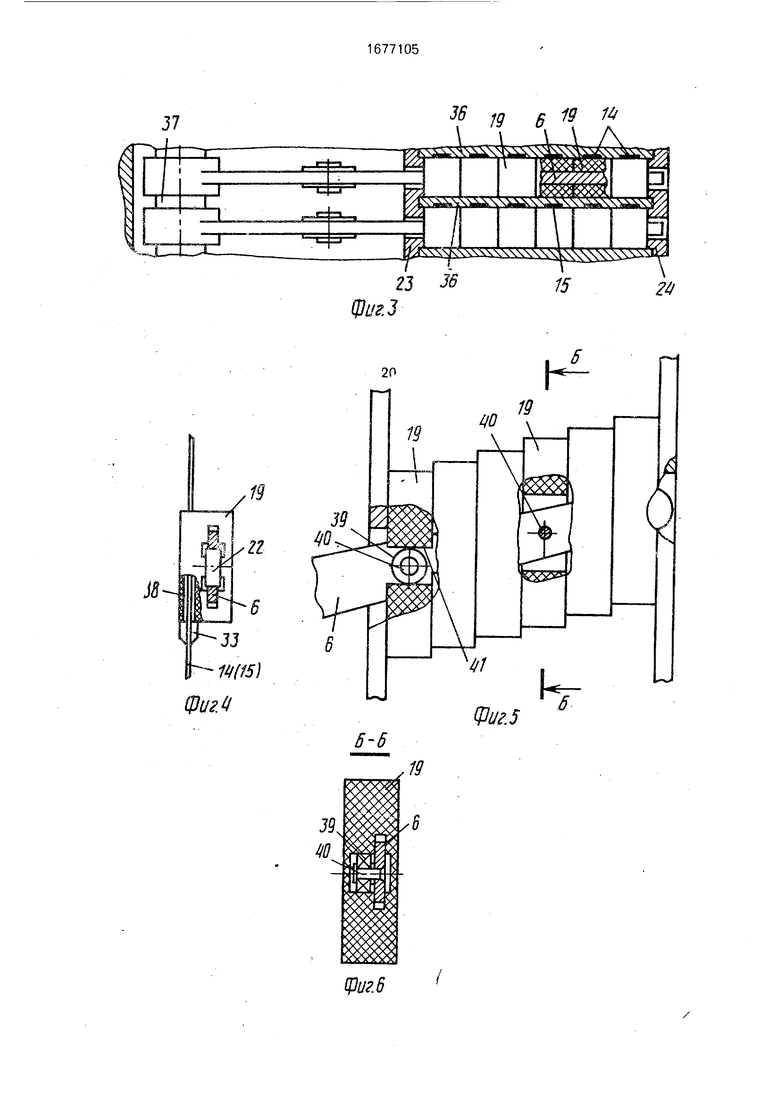
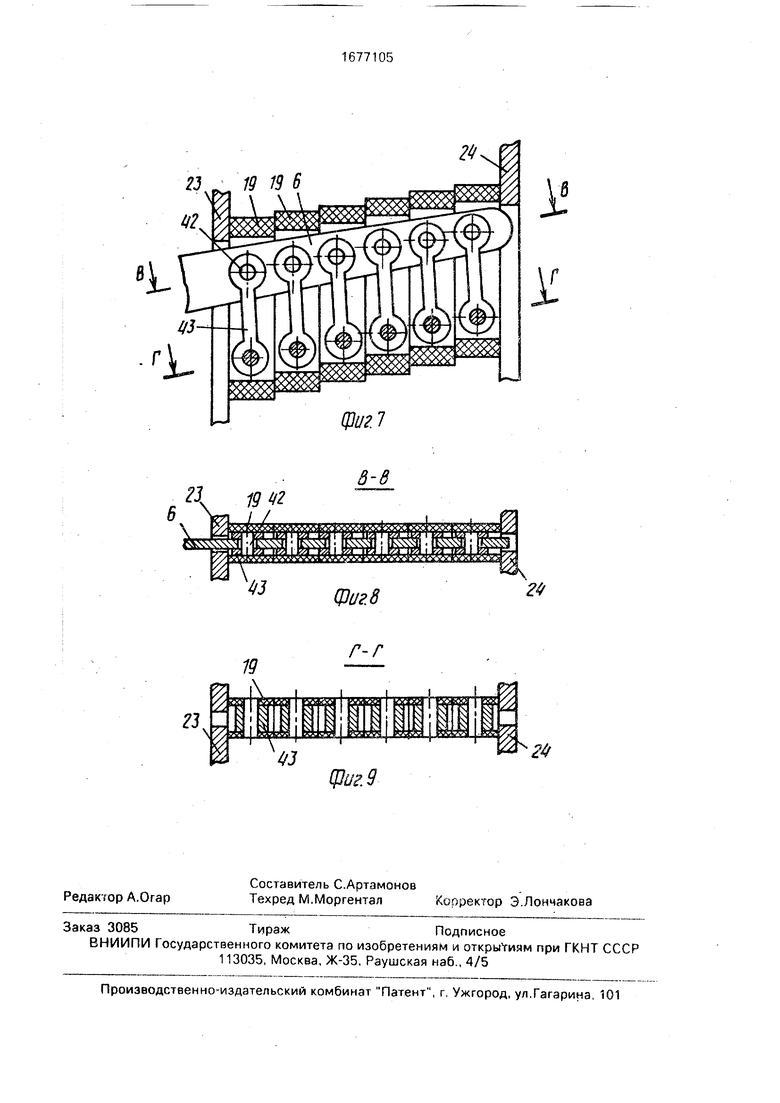
На фиг. 1 представлено предлагаемое устройство, вид сбоку; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - ножи зевообразующего устройства, вид сверху; на фиг, 4 - сухарь с крючком, вид спереди;-на фиг. 5 - кинематическая связь сухарей с ножом, вид сбоку, второй пример исполнения; на фиг. 6 - разрез Б-Б на фиг. 5; на фиг. 7 - кинематическая связь сухарей с ножом, вид с боку, третий пример исполнения; на фиг. 8 - разрез В-В на фиг. 7; на фиг. 9 - разрез Г-Г на фиг. 7.
Зевообразующее устройство ткацкого станка с волнообразно подвижным зевом крепится на продольной связи 1 (фиг. 1) станка и содержит установленные по ширине станка пары ножей 2-5 (фиг. 2). Каждый нож из пары включает рычаг б, который связан с механизмом привода, состоящим из кулачкового вала 7 и закрепленных на нем кулачков 8. В направляющих 9 установлены толкатели 10, подпружиненные к кулачкам 8, Толкатель 10 на верхнем конце имеет ролик 11, входящий в паз 12 рычага 6. Сообщение рычагам 6 каждой пары ножей 2-5 противофазного движения, а также сообщение движения соседним по ширине станка парам ножей со сдвигом по фазе обеспечиваются соответствующим угловым смещением кулачков 8 на валу 7.
Вдоль ширины станка в несколько рядов установлены галевоносители 13 и соответствующие им пары крючков 14 и 15. Га лево носите ль 13 с парой крючков 14 и 15 соединен с помощью пары гибких связей 16 и 17 и полиспаста 18, причем один конец гибкой связи 16 закреплен неподвижно с возможностью регулировки, а другой закреплен на галевоносителе 13. Каждый нож, кроме рычага 7, включает расположенные вдоль рычага 6 и кинематически связанные
с ним сухари 19. Кинематическая связь осуществляется с помощью выполненного вдоль рычага б паза 20 и расположенного на оси 21 в каждом сухаре 19 ролика 22 или
камня (не показан), который взаимодействует с продольными стенками г,аза. Сухари 19 каждого ножа контактируют боковыми сторонами друг с другом, а крайние из них - и с направляющими 23 и 24, параллельными
направлению перемещения крючков. Крючки 14 и 15 расположены в направляющих 25 и 26. В зоне крайнего нижнего положения крючков расположены средства управления связью крючка с ножом. Каждое средство
выполнено в виде электромагнит 27 с полюсами 28 и 29 и двух упругих пластин 30 и 31 из ферромагнитного материала. Пласги- ны 30 и 31 закреплены конссльно в jo-te полюса 28. Свободный конец пластин имеет
зацеп 32 и в нормальном положении находится на расстоянии от полюса 29. В свою очередь, крючки 14 и 15 имеют элемент для зацепления с ножом, выполненный в виде выступа 33, и отверстие 34 для взаимодействия с зацепом 32.
Для определенности положения сухарей 19 ножа по ширине станка на сухаре 19 выполнен открытый со сторон контакта с
соседними сухарями 19 паз 35 (фиг. 2) для прохода рычага б, при этом ширина паза соответствует толщине рычага, В этом случае сухари 19 ножа направляются и ориентируются рычагом 6, занимающим
определенное положение по ширине станка. Дополнительные направляющие между рядами сухарей 19 при этом не требуются. Для повышения точности согласования положения ножа и крючков 14 и 15 (фиг. 3)
между рядами сухарей 19 могут быть установлены направляющие 36. В этом случае, если на су аре 19 предусмотрен паз для рычага б, то рычаг 6 на оси 37 выполняют плавающим и его положение вместе с сухарями 19 определяет направляющие 36.
Сухарь 19(фиг. 4)может иметь также паз 38 для прохода крючков 14 (15), открытый в направлении его перемещения. Тогда выступ 33 выполняют по обеим сторонам крючка 14 (15).
Согласно фиг. 5 и б кинематическая связь рычага 6 с сухарями 19 осуществлена посредством роликов 39 (или камней), установленных на осях 40, закрепленных на рычаге б Каждый ролик 39 при этом контактирует со стенками. 41 паза, выполненного в сухаре 19.
Возможно также исполнение кинематической связи рычага б (фиг. 7-9) с сухарями 19, при котором вдоль рычага 6 последовательно, в соответствии с положением сухарей, смонтированы шарниры 42. На каждом сухаре 19 одного рычага шарнирно установлена тяга 43, которая соединена с соответствующим шарниром 41 рычага 6.
Для образования нитями основы 44 (фиг. 1) зева 45 для прокладчиков уточной нити 46 галевы47 набраны на галевоносители 13. Прямолинейность галев и отслеживание крючками положения ножей обеспечивается силой упругости приданных гзлевам эла- стичных подвязей (не показаны).
Изобретение не ограничивается приведенными примерами исполнения элементов кинематической связи сухарей с ры -.агом схемой привод рычагов, исполь- зоваклем устройства на станке только в варианте нижнего расположения, з также ориентацией и взаимным расположением элементов устройства.
Устройство работает следующим обра- зом.
Вращение вала 7 (фиг. 1) с кулачками 8 вызывает перемещение толкателей 10 и связанных с ними рыча ов 6, причем в силу фазового сдвига кулачков 8 на валу 7 рычаги 6 олной и тон же пары ножей 2-5 (фиг. 2} совершают противофазные движения и рычаги б соседних по ширине станка пар ножей перемещаются с последовательным сдвигом по фазе в направлении перемеще- ния прокладчиков уточной ниги 46, т.е. рычаги 6 в своем мгновенном положении располагаются по волне, а движение рычагов 6 зь.зывает перемещение этой волны в направлении перемещения поокладчиков уточной н-лти 46. Рычаги б ножей благодаря кинематической связи, выполненной согласно фиг. 1, 5 и 7, перемещают сухари 19. При этом в силу связи сухарей 19 с разными точками рычага б, и имеющими увеличиваю- щееся с приближением к концу рычага перемещение, сухари одного ножа имеют разные ходы, что необходимо при получении чистого зева. При своем возвратно-поступательном прямолинейном движении сухари 19 (фиг. 1, 2 и 5) направляются с одной стороны боковыми сторонами соседних сухарей 19(для двух крайних сухарей 19 ножа используются и направляющие 23 и 24), а с другой стороны - плоскостями рыча- (ов 6 или направляющими 36 (фиг. 3). В последнем случае в соответствии с положением сухарей 19 в направляющих 36 ироис ходит самоустановка рычагов 6 на оси 37
В зависимости от того, подан или нет сигнал от программагсра к электромагнитам 27, в период расположения крючка 14 (15) в нижнем положении упругая пластина 30 (31) соответственно притягивается к полюсу 29 электромагнита или остается в зоне крючка. В первом случае крючок под действием сил упругости эластичных подвязей отслеживает движение сухаря 19 ножа, во втором случае зацеп 32 упругой пластины 30 (31), находясь в отверстии 34 крючка, не позволяет последнему перемещаться. Движение от пары крючков 14 и 15 передается с помощью гибкой связи 17 на полиспаст 18, где оно суммируется. Далее результирующее движение с помощью гибкой связи 16 передается к галевоносителю 13, перемещающему с помощью галев 47 нити основы 44. В зависимости от того, движутся оба крючка 14 и 15. выстаивают оба или перемещается один из крючков, галевоноситель 13 соответственно выстаивает в верхнем или нижнем положении или перемещается в фазе управляющего крючком ножа При выработке ткани простых переплетений управляющие сигналы от программатора подаются последовательно со сдвигом по фазе (синхронно с перемещением ножей) к электромагнитам 27 средств управления связью крючка с ножом, начиная с первого электромагнита (считая в направлении, противоположном направлению перемещения прокладчиков уточной нити). При формировании кромок ткани с отличным от фона ткани переплетением на электромагниты, соответствующие галевоносителям кромочных нитей, сигналы от программатора поступают по отдельной программе. В случае выработки ткани со сложным рисунком переплетения каждый электромагнит может управляться по отдельной программе. Формула изобретения 1. Зевообразующее устройство ткацкого станка с волнообразно подвижным зевом, содержащее размещенные по ширине станка галевоносители, соединенные с крючками, имеющими возможность взаимодействия с ножами, смонтированными попарно с возможностью перемещения в противофазе и размещенными по ширине станка с фазовым сдвигом каждой пары относительно соседней с ней пары, а каждый нож выполнен в виде рычага, кинематически связанного с приводом, и средства управления крючками для связи их с ножами, отличающееся тем, что, с целью расширения ассортиментных возможностей и повышения скоростных возможностей, каждый рычаг имеет сухари для взаимодействия с крючками, размещенные вдоль рычага и кинематически с ним связанные, сухари имеют жестко установленные направляющие и размещены между ними, а сухари одного рычага расположены с контактированием один с другим, при этом жестко установленные направляющие контактируют с крайними сухарями каждого рычага и установлены параллельно направ лению перемещения крючков.
;-
2.Устройство по п. Ч.отличающее- с я тем,что кинематическая связь сухарей с рычагом выполнена в виде роликов или кам- ней, установленных на осях в сухарях, и паза в рычаге, при этом ролики или камни смонтированы в пазу рычага.
3.Устройство по п. 1,отличающеес я тем, что кинематическая связь сухарей с рычагом выполнена в виде роликов илм кам10
15
20
25ней, смонтированных на рычагах посредством осей и выполненных в каждом сухаре пазов, при этом ролики или камни расположены в пазах сухарей,
4.Устройство по п. 1, отличаю щее- с я тем, что кинематическая связь рычага с сухарями выполнена в виде тяг по числу сухарей, шарнирно соединенных с соответ ствующим сухарем и рычагом.
5.Устройство по пп. 1-4, отличающееся тем, что каждый сухарь имеет открытый с его стороны, контактирующей с соседним сухарем, паз для прохода рычага, причем ширина паза соответствует толщине рычага.
6.Устройство по пп. 1-5, отличающееся тем, что оно имеет направляющие сухарей и крючков, расположенные между рыча- га,ми.
7.Устройство по пп, 1 6, отличающееся тем, что крючки имеют выступы для взаимодействия с ножами.
8.Устройство по пп. 1-7, от л ичг юще- е с я тем, что каждый сухарь имеет открытый паз для прохода крючка, а выступ крючка расположен по обе стороны от паза.
А
11/, К
-bnfci:
36 jg ff 19 №
,
p
i
П
/5
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗЕВООБРАЗУЮЩЕЕ УСТРОЙСТВО ТКАЦКОГО СТАНКА С ВОЛНООБРАЗНО ПОДВИЖНЫМ ЗЕВОМ | 2000 |
|
RU2173358C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЖАККАРДОВЫМ ЗЕВООБРАЗУЮЩИМ МЕХАНИЗМОМ ТКАЦКОГО СТАНКА С ВОЛНООБРАЗНО ПОДВИЖНЫМ ЗЕВОМ | 2000 |
|
RU2178471C1 |
| ЗЕВООБРАЗУЮЩЕЕ УСТРОЙСТВО ТКАЦКОГО СТАНКА С ВОЛНООБРАЗНО ПОДВИЖНЫМ ЗЕВОМ | 2000 |
|
RU2177057C1 |
| Ткацкий станок | 1990 |
|
SU1824464A1 |
| Ткацкий станок с волнообразно-подвижным зевом | 1981 |
|
SU1144621A3 |
| Зевообразующее устройство ткацкого станка с волнообразно подвижным зевом | 1980 |
|
SU973679A1 |
| Ткацкий станок с волнообразно подвижным зевом | 1977 |
|
SU833169A3 |
| Зевообразующее устройство ткацкого станка | 1982 |
|
SU1027301A1 |
| ЗЕВООБРАЗОВАТЕЛЬНЫЙ МЕХАНИЗМ ДЛЯ ФОРМИРОВАНИЯ ТРЕХОСНОЙ ТКАНИ | 2023 |
|
RU2806965C1 |
| Устройство розыска раза к ткацкому рапирному станку | 1989 |
|
SU1694731A1 |
Изобретение касается зевообрззующе- го устройства ткацкого станка с волнообраз- но подвижным зевом и позволяет расширить ассортиментные возможности и повысить скоростные возможности. Попарно сгруппированные ножи, содержащие ры чаги б, совершают от привода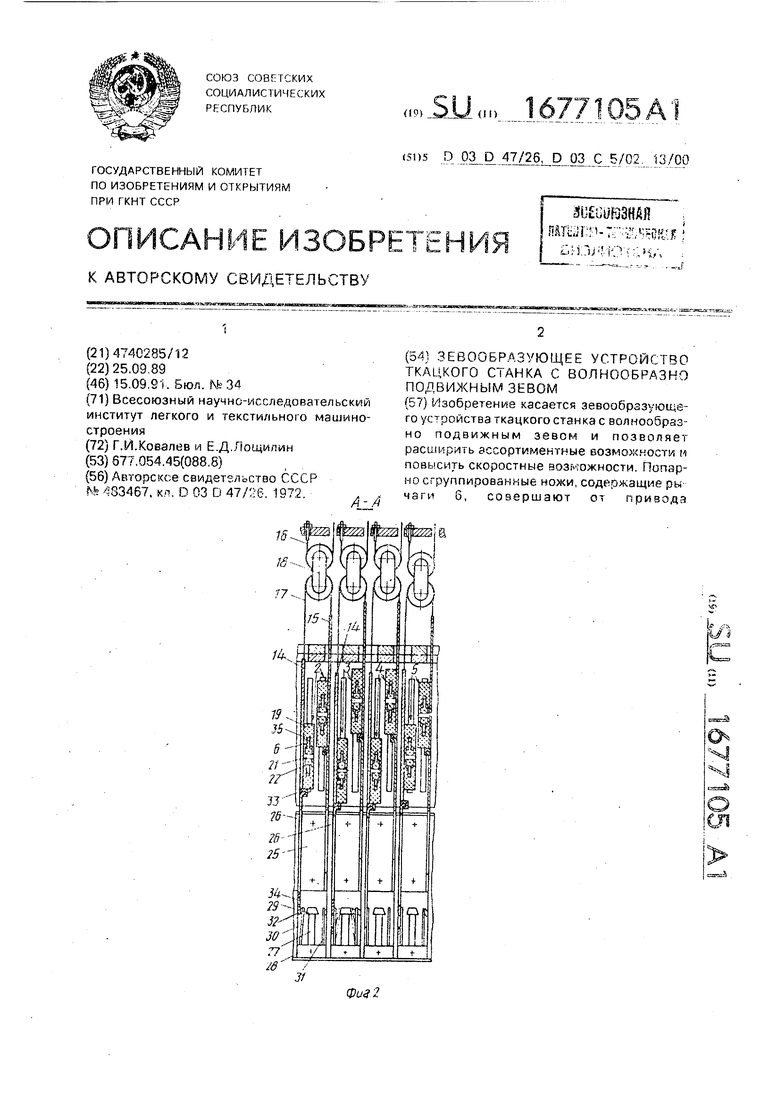
№5
®«J
23
фиг
23 19 «г
6 Ъ
Фиг 8
Г-г
в-в
| ДЛЯ ИССЛЕДОВАНИЯ ГАЗОВ В ЖИДКОСТЯХ | 0 |
|
SU333467A1 |
| к | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
| А ий ноА А ( ЗЕВООБРйЗУЮЩЕЕ УСТРОЙСТВО ТКАЦКОГО СТАНКА С ВОЛНООБРАЗНО ПОДВИЖНЫМ ЗЕВОМ | |||
