(54) ТКАЦКИЙ СТАНОК С ВОЛНООБРАЗНО ПОДВИЖНЫМ ЗВВОМ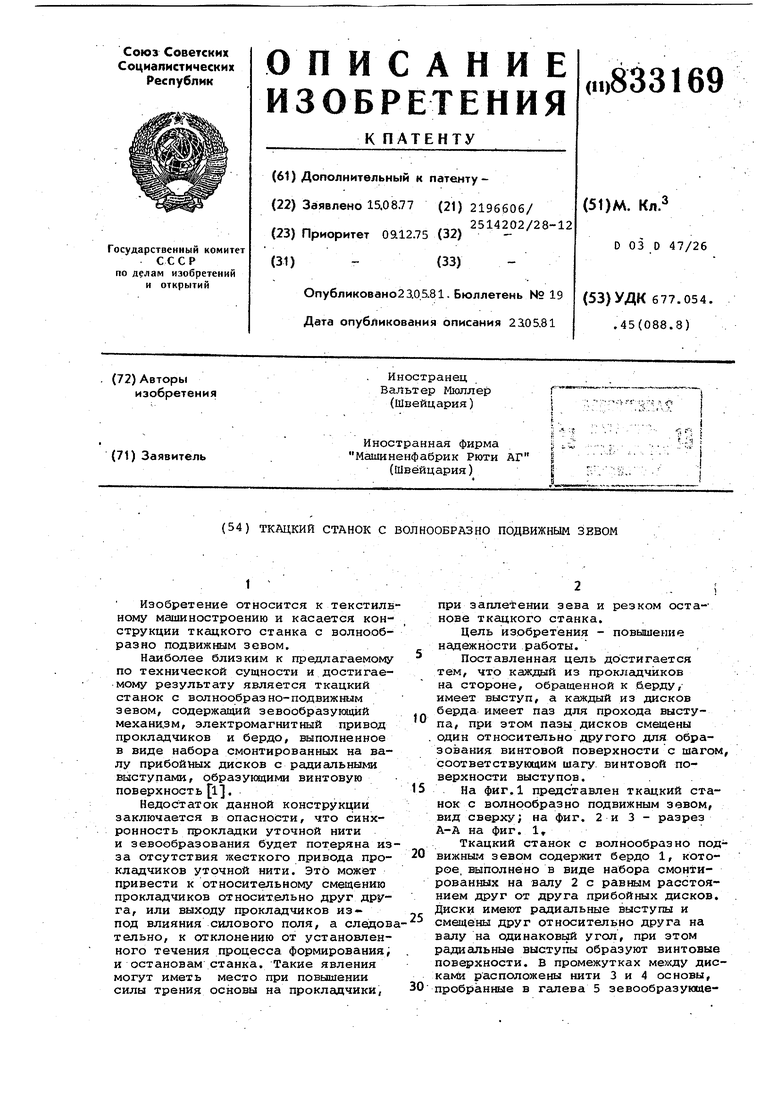
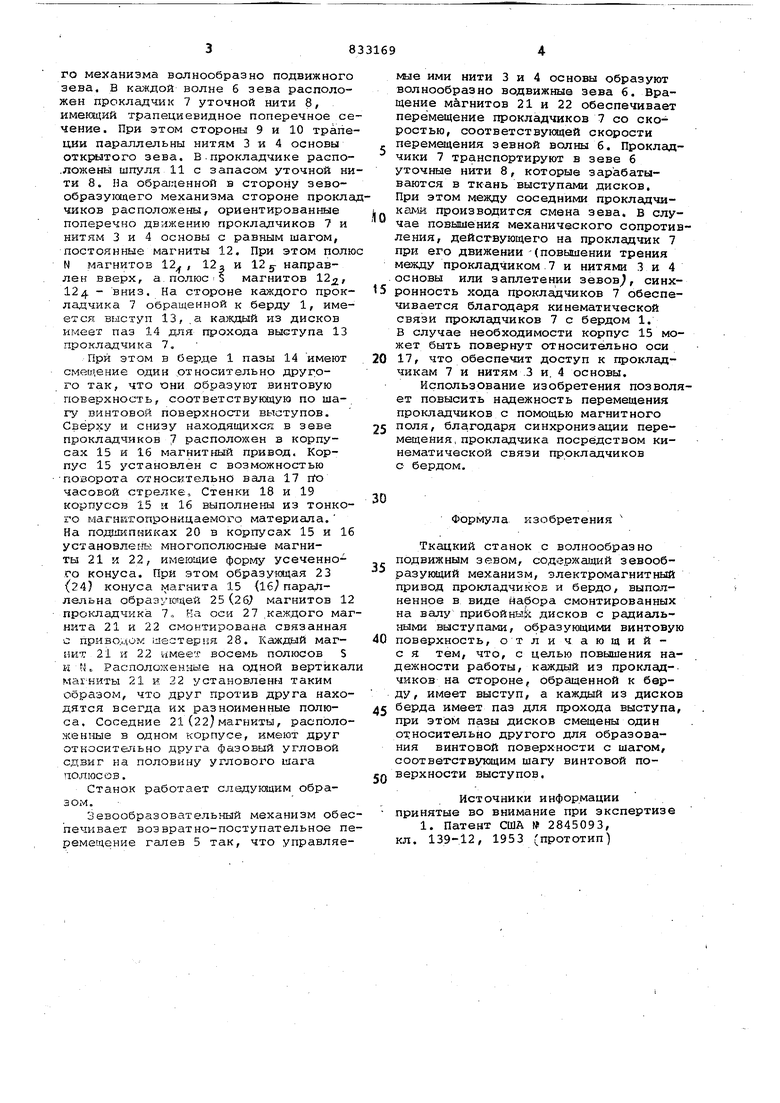
1 Изобретение относится к текстилв ному машиностроению и касается конструкции ткацкого станка с волнообразно подвижным зевом, Нгтболее близким к предлагаемому по технической сущности и достигаемому результату является ткацкий станок с волнообразно-подвижным зевом, содержащий зевообразующйй механикам, электромагнитный привод прокладчиков и бердо, выполненное в виде набора смонтированных на валу прибойных дисков с радиальными выступами, образующими винтовую поверхность 1. Недостаток данной конструкции заключается в опасности, что синхронность щ окладки уточной нити и зевообразования будет потеряна из за отсутствия жесткого привода прокладчиков уточной нити. Это может привести к относительному смещению прокладчиков относительно друг друга, или выходу прокладчиков изпод влияния силового ПОЛЯ, а следов тельно, к отклонению от установленного течения процесса формирования и остановам станка. Такие явления могут иметь место при повышении силы трения основы на прокладчики, при запле ении зева и резком останове ткацкого станка. Цель изобретения - повышение надежности работы.. Поставленная цель достигается тем, что каждый из проклгщчиков на стороне, обращенной к .берду, имеет выступ, а каждый из дисков берда имеет паз для прохода выступа, при этом пазы дисков смещены один относительно другого для образования винтовой поверхности с шагом, соответствующим шагу, винтовой поверхности выступов. . На фиг.1 представлен ткацкий станок с волнообразно подвижным зевом, вид сверху; на фиг. 2 и 3 - разрез А-А на фиг. 1 Ткацкий станок с волнообразно подВИЖНЫ.М зевом содержит бердо 1, которое, выполнено в виде набора смонтированных на валу 2 с равным расстоянием друг от друга прибойных дисков. Диски имеют радиальные выступы и смещены друг относительно друга на валу на одинаковый угол, при этом радиальные выступы образуют винтовые поверхности. В промежутках мехшу дискаМи расположены нити 3 и 4 основы, пробранные в галева 5 зевообразующего механизма волнообразно подвижного зева, В каждой волне 6 зева расположен прокладчик 7 уточной нити 8, имегадий трапециевидное поперечное сечение. При этом стороны 9 и 10 трапеции параллельны нитям 3 и 4 основы открытого зева. В.прокладчике распо.ложены шпуля 11 с запасом уточной нити 8. На обра1:1енной в сторону зевообразугадего механизма стороне проклачиков расположены, ориентированные поперечно движению прокладчиков 7 и нитям 3 и 4 основы с равным шагом, постоянные магниты 12, При этом полю N магнитов 12, 12я тл 1.2 направлен вверх, а полюс S магнитов 12, 124 вниз. На стороне каждого прокладчика 7 обращенной к берду 1, имеется выступ 13, ,а каждый из дисков имеет паз 14 для прохода выступа 13 прокладчика 7.
При этом в берде 1 пазы 14 имеют смещение один .относительно другого так, что они образуют винтовую поверхность, соответствующую по ша-, гу винтовой поверхности выступов. Сверху и снизу находящихся в зеве прокладчиков 7 расположен в корпусах 15 и 16 магнитный привод. Корпус 15 установлен с возможностью поворота относительно вала 17 ito часовой стрелке. Стенки 18 и 19 корпусов 15 II 16 выполнены из тонкого MarHssronpOHHuaeMoro материала. Ка под 11ипкиках 20 в корпусах 15 и 16 установлег-гы многополюсные магниты 21 и 22, имеющие форму усеченного конуса. При этом образующая 23 (24 конуса магнита 15 {16 параллельна образующей 25 (26) магнитов 12 прокладчика 7. Ка оси 27 .каждого магнита 21 и 22 смонтирована связанная с приводом шестерня 28. Кажда1й магнит 21 и 22 имеет восемь полюсов S т П Расположенные на одной вертикал 21 и 22 установлены таким образом, что друг против друга находятся всегда их разноименные полюса. Соседние 21(22)магниты, расположенные в одном корпусе, имеют друг относительно друга фазовый угловой сдвиг на половину углового uiara полюсов.
Станок работает следующим образом,
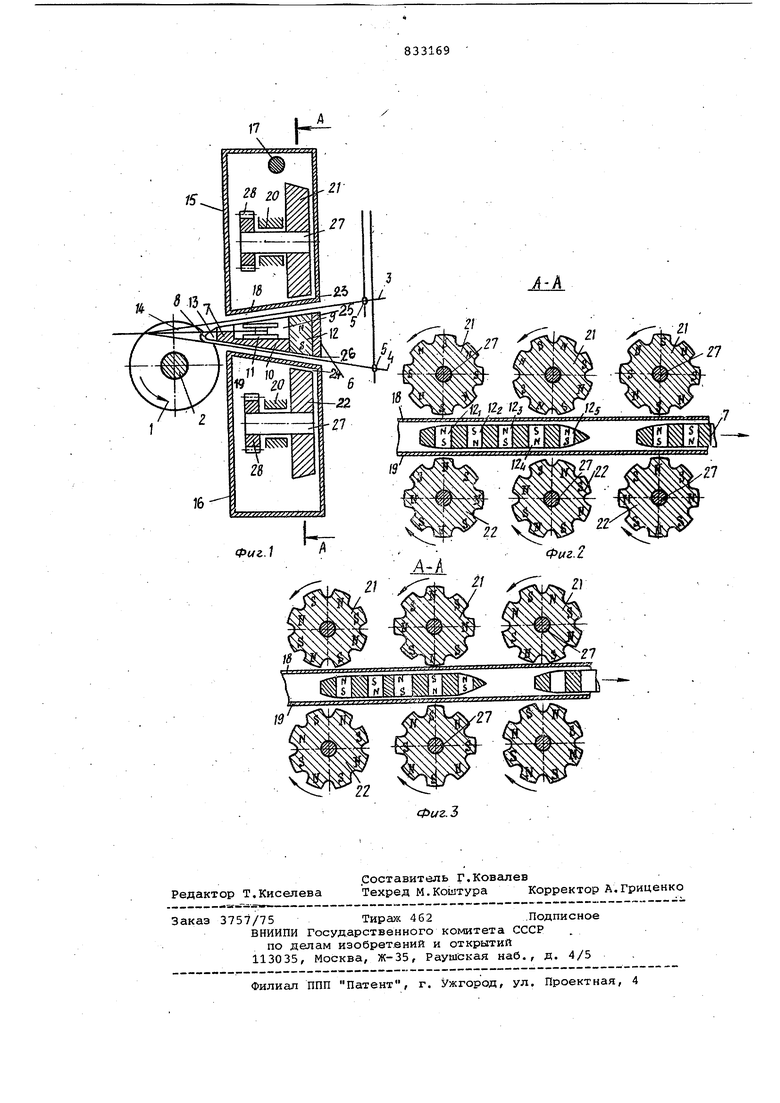
Зевообразовательный механизм обеспечивает воз вратно-поступательное перемещение галев 5 так, что управляемое ими нити 3 и 4 основы образуют волнообразно водвижные зева 6. Вращение магнитов 21 и 22 обеспечивает перемещение прокладчиков 7 со скоростью, соответствукщей скорости перемещения зевной волны 6. Прокладчики 7 транспортируют в зеве б уточные нити 8, которые зарабатываются в ткань выступами дисков. При этом между соседними прокладчикали производится смена зева, В случае повышения механического сопротивления, действующего на прокладчик 7 при его движении (повышении трения между прокладчиком . 7 и нитями 3 и 4 основы или заплетении зевов, синхровность хода прокладчиков 7 обеспечивается благодаря кинематической связи прокладчиков 7 с бердом 1. В случае необходимости корпус 15 может быть повернут относительно оси
17, что обеспечит доступ к прокладчикам 7 и нитям ,3 и. 4 основы.
Использование изобретения позволяет повысить надежность перемещения прокладчиков с помощью магнитного
поля, благодаря синхронизации перемещения, прокладчика посредством кинематической связи прокладчиков с бердом.
Формула изобретения
Ткацкий станок с волнообразно подвижным зевом, содержащий зевообразующий механизм, электромагнитный привод прокладчиков и бердо, выполненное в виде набора смонтированных на валу прибойный дисков с радиальными выступами, образующими винтовую
0 поверхность, отличающийс я тем, что, с целью повышения надежности работы, каждьай из проклад-. чиков на стороне, обращенной к барду, имеет выступ, а каждый из дисков
5 берда имеет паз для прохода выступа, при этом пазы дисков смещены один озгносительно другого для образования винтовой поверхности с шагом, соотвёт-ствутощим шагу винтовой поQ верхности выступов.
Источники информации принятые во внимание при экспертизе
