Изобретение относится к строи(ельно- му и дорожному машиностроению, а именно к системам управления рабочим органом бульдозерного агрегата.
Цель изобретения - повышение производительности бульдозера путем устранения перерегулирования при управлении рабочим органом.
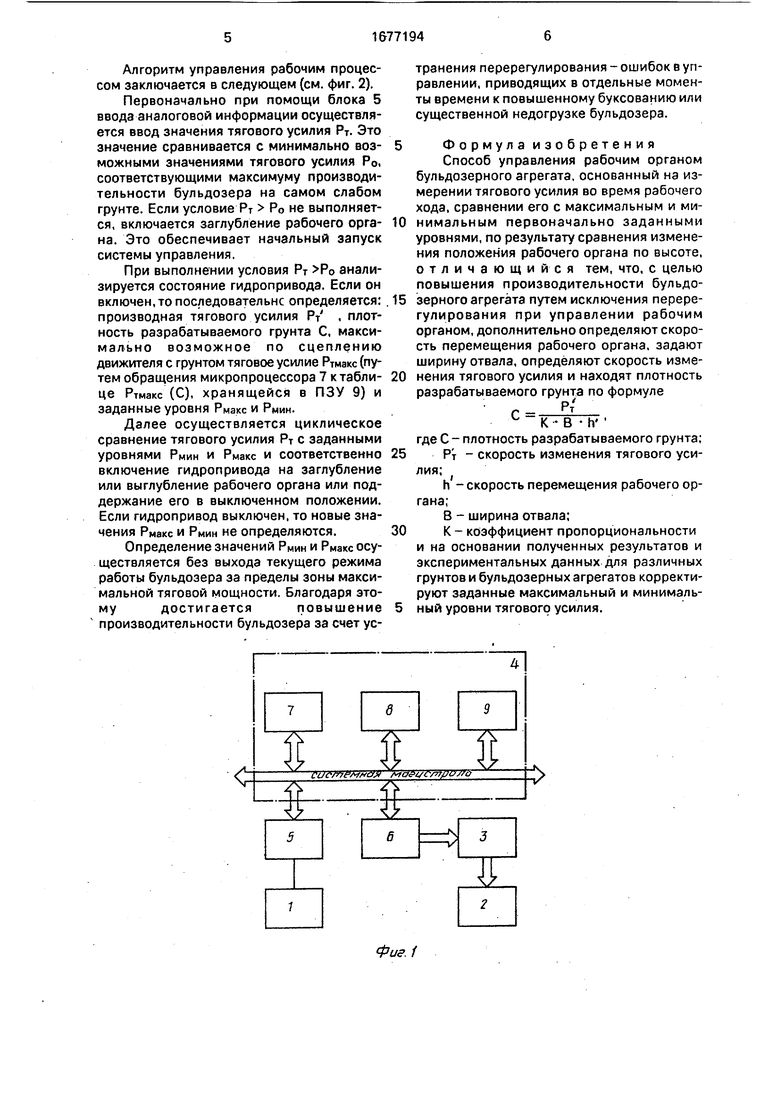
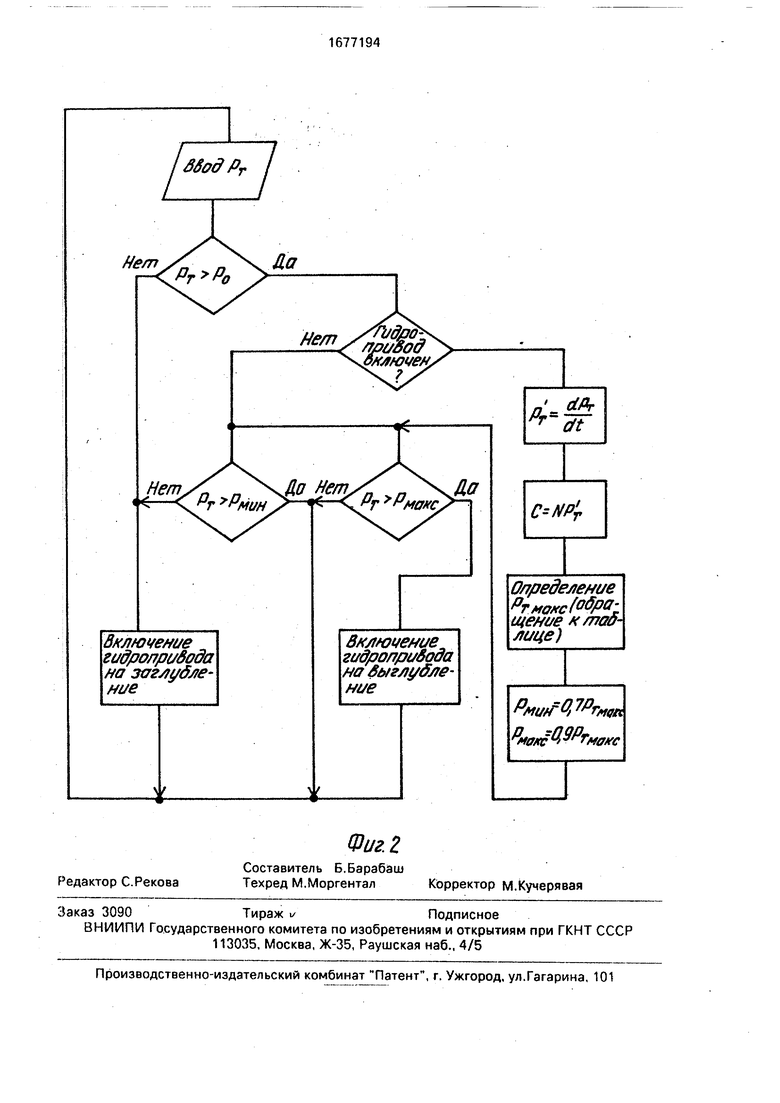
На фиг. 1 изображена структурная схема устройства, реализующего предлагаемый способ; на фиг. 2 - укрупненная схема
алгоритма формирования сигналов управления рабочим органом.
Устройство управления рабочим органом бульдозерного агрегата содержит блок 1 измерения тягового усилия, электрогидравлический привод 2 рабочего органа, блок 3 силовых ключей, а также связанные общей системной магистралью микроЭВМ 4, блок 5 ввода аналоговой информации и блок 6 вывода дискретных сигналов. МикроЭВМ содержит микропроцессор 7, оперативное
о
Ч
VI
0НЕОТ&
ч
4
тжЗ
запоминающее устройство 8 и постоянное запоминающее устройство (ПЗУ) 9.
Суть предлагаемого способа управления заключается в следующем.
При разработке грунта тяговое усилие бульдозера определяется по широко известной формуле
, PT KiBh+q (1)
где Рт - тяговое усилие бульдозера;
Ki - коэффициент сопротивления грунта резанию;
В - ширина отвала;
h - толщина срезаемой стружки грунта;
q - объем грунта в призме волочения;
у- объемная масса грунта; fi - суммарный коэффициент трения грунта о грунт и сталь.
У бульдозера с нерегулируемой скоро- стью перемещения рабочего органа его заглубление (выглубление) осуществляется в течение коротких отрезков времени (например, для бульдозера на базе трактора - в среднем 0,3 с). Приращение объема грунта в призме волочения за такие интервалы времени незначительно. Поэтому
APr«KiBAh,(2)
где Ah и ДРТ - соответственно лрираще- ния толщины срезаемой стружки грунта и тягового усилия бульдозера в о время включенного состояния гидропривода. Соответственно
v о Ah
-CBh
i С
или Рт тьт- -жо,
Переходя к пределу, получим
Pi KiBh; ,(4)
где Рт - скорость изменения тягового усилия;
h - скорость перемещения рабочего органа;
h - const, так как предполагается использование на бульдозере гидропривода рабочего органа с нерегулируемой скоростью,
Установлено, что коэффициент сопротивления грунта резанию подавляющего большинства грунтов пропорционален плотности С грунта, определяемой динамическим плотномером ДорНИИ
-С,(5)
где С - плотность разрабатываемого грунта;
K const- коэффициент пропорциональности.
С учетом изложенного
(ОМ-РТ):(6)
С
Рт
К В h
0
5
0
5
0
5
0
5
0
5
где тт К -Вг/ - коэффициент, имеющий
постоянное значение для каждого конкретного бульдозерного агрегата.
Функция Ртмакс (С) непрерывна и дифференцируема. Поэтому ее можно разложить в ряд Тейлора. Ограничиваясь членами до второго порядка включительно, получим:
Ртмакс а0+а1С-а2С2,(7)
где а0 32 - постоянные коэффициенты,
имеющие размерность тягового усилия.
Например, для бульдозера на базе трактора
Ртмакс 1,48+3,13 С - 0,2 С2(8)
Экспериментальное подтверждение этой формулы для определения максимально возможного по сцеплению тягового усилия бульдозерного агрегата ДЗ-27С на базе трактора Т-130 можно найти в книге Ю.В. Гинзбурга и др. Промышленные тракторы. М.: Машиностроение. 1986, с. 96, рис. 4,136.
Можно также не аппроксимировать эту зависимость какой-либо функцией, а представить ее в виде таблицы и занести в память микроЭВМ.
Оптимальные минимальный и максимальный заданные уровни тягового усилия должны составлять ориентировочно 0,7 Ртмах и 0,9 Ртмах. Конкретные значения коэффициентов при Ртмах зависят от типа трактора и уточняются в ходе испытаний. Так, для трактора Т-170 с гидромеханической трансмиссией уточненные значения этих коэффициентов составляют соответственно 0,6 и 0,8.
Микропроцессор 7, входящий в состав микроЭВМ 4, всегда является активным модулем, Остальные модули, подключенные к системной магистрали - пассивные. В постоянном запоминающем устройстве (ПЗУ) 9 хранится программа микроЭВМ, таблица значений Рттах (С) и константы N; 0,7; 0,9 и т.д. В оперативном запоминающем устройстве (ОЗУ) хранятся результаты промежуточных вычислений.
Блок 5 ввода аналоговой информации преобразует выходной сигнал блока измерения тягового усилия 1 в двоичный код и обеспечивает передачу этого кода на системную магистраль в процессе ввода информации о тяговом усилии в микропроцессор 7. Блок 6 вывода дискретных сигналов обеспечивает передачу информации с системной магистрали на входы блока 3 силовых ключей. Блок 3 силовых ключей имеет два силовых ключа для включения заглубления -и выглубления рабочего органа и обеспечивает усиление выходных сигналов микроЭВМ 4 по мощности.
Алгоритм управления рабочим процессом заключается в следующем (см. фиг. 2).
Первоначально при помощи блока 5 ввода аналоговой информации осуществляется ввод значения тягового усилия Рт. Это значение сравнивается с минимально воз- можными значениями тягового усилия Р0, соответствующими максимуму производительности бульдозера на самом слабом грунте. Если условие Рт Ро не выполняется, включается заглубление рабочего орга- на. Это обеспечивает начальный запуск системы управления.
При выполнении условия Рт Ро анализируется состояние гидропривода. Если он включен, то последовательнс определяется: производная тягового усилия Р/ , плотность разрабатываемого грунта С, максимально возможное по сцеплению движителя с грунтом тяговое усилие Ртмакс (путем обращения микропроцессора 7 к табли- це Ртмакс (С), хранящейся в ПЗУ 9) и заданные уровня Рмакс и РМин.
Далее осуществляется циклическое сравнение тягового усилия Рт с заданными уровнями РМИН и Рмакс и соответственно включение гидропривода на заглубление или выглубление рабочего органа или поддержание его в выключенном положении. Если гидропривод выключен, то новые значения Рмакс и РМИН не определяются.
Определение значений РМИН и Рмакс осуществляется без выхода текущего режима работы бульдозера за пределы зоны максимальной тяговой мощности. Благодаря этомудостигаетсяповышениепроизводительности бульдозера за счет устранения перерегулирования - ошибок в управлении, приводящих в отдельные моменты времени к повышенному буксованию или существенной недогрузке бульдозера.
Формула изобретения Способ управления рабочим органом бульдозерного агрегата, основанный на измерении тягового усилия во время рабочего хода, сравнении его с максимальным и минимальным первоначально заданными уровнями, по результату сравнения изменения положения рабочего органа по высоте, отличающийся тем, что, с целью повышения производительности бульдозерного агрегата путем исключения перерегулирования при управлении рабочим органом, дополнительно определяют скорость перемещения рабочего органа, задают ширину отвала, определяют скорость изменения тягового усилия и находят плотность разрабатываемого грунта по формуле
С рт
К В h
где С - плотность разрабатываемого грунта;
Р т - скорость изменения тягового усилия;
h - скорость перемещения рабочего органа;
В - ширина отвала;
К- коэффициент пропорциональности и на основании полученных результатов и экспериментальных данных для различных грунтов и бульдозерных агрегатов корректируют заданные максимальный и минимальный уровни тягового усилия.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления бульдозерным агрегатом | 1985 |
|
SU1331968A1 |
| Система управления бульдозерным агрегатом | 1980 |
|
SU870614A1 |
| БУЛЬДОЗЕР С АВТОМАТИЧЕСКИМ УПРАВЛЕНИЕМ ОТВАЛОМ | 1991 |
|
RU2014400C1 |
| ГУСЕНИЧНЫЙ БУЛЬДОЗЕР С ЭЛЕКТРИЧЕСКОЙ ТРАНСМИССИЕЙ И ХОДОВОЙ ЧАСТЬЮ С ИЗМЕНЯЕМЫМ ПОЛОЖЕНИЕМ ВЕДУЩИХ КОЛЕС | 2018 |
|
RU2696634C1 |
| Гидропривод бульдозерного оборудования | 1982 |
|
SU1120074A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ГРУНТА ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232234C2 |
| Установка для испытаний промышленного трактора | 1990 |
|
SU1742665A1 |
| ЭЛЕКТРОННО-ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ОТВАЛОМ БУЛЬДОЗЕРА | 1996 |
|
RU2109883C1 |
| Устройство для управления рабочим органом землеройно-транспортной машины | 1983 |
|
SU1102869A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 1981 |
|
RU1055199C |
Изобретение относится к строительному и дорожному машиностроению и позволяет управлять рабочим органом бульдозерного агрегата во время рабочего хода. Цель изобретения - повышение производительности бульдозерного агрегата путем исключения перерегулирования при управлении рабочим органом. Для этого сначала в процессе копания измеряют тяговое усилие РТ и сравнивают его с максимальНЫМ Ртмакс И МИНИМалЬНЫМ Ртмин первоначально заданными уровнями. По результатам сравнения изменяют положение рабочего органа по высоте h. Затем дополнительно определяют скорость изменения тягового усилия РТ , скорость h перемещения рабочего органа, задают ширину отвала В и находят плотность С разрабатываемого грунта по формуле /(К -В -гГ), где К - коэффициент пропорциональности. На основании полученных результатов и экспериментальных данных для различных грунтов и бульдозерных агрегатов корректируют заданные максимальный и минимальный уровни тягового усилия. Оптимальные минимальный и максимальный заданные уровни тягового усилия ориентировано должны составлять, например, 0,7 Ртмакс и 0,9 РТ мах 2 ил. сл
Фиг. 1
SSodPr
Нет
Включение гидропривода на быглубление
г
I
Фиг. Z
Редактор С.Рекова
Составитель Б.Бэрэбаш Техред М.Моргентал
Определение
Ртмохс(0Фа щение к таблице)
Рми/гЦ7Ргмт Рмоя:У У гмохс
Корректор М.Кучерявая
| Способ управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1352011A1 |
| Система управления бульдозерным агрегатом | 1980 |
|
SU870614A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| Алексеев Т.Д | |||
| и др | |||
| Машины для земельных работ | |||
| М.: Машиностроение, 1964. | |||
